基于LabVIEW的3-UPS-1-PS并聯機構控制系統設計
2012-10-16 03:56:24謝立臣王海博
河北工程大學學報(自然科學版) 2012年4期
謝立臣,王海博,顏 亮
(1河北工程大學機電工程學院,河北邯鄲056038;2邯鄲市生產力促進中心,河北邯鄲,056002)
并聯機構具有結構簡單、剛度大、精度高、負載能力強、高速性能好、控制簡單等特點,并聯機構的控制也有很多成熟方案,如液壓缸驅動圓柱副、直線電機驅動移動副和旋轉電機驅動螺旋副等[1]。結合并聯機構優點,國內外已有很多專家將并聯機構應用在汽車薄板件柔性可重構夾具中[2]。本文以汽車焊裝線上作為薄板件柔性夾具結構基礎的3-UPS-1-PS并聯機構控制系統為研究對象,研究3-UPS-1-PS并聯機構的控制系統的設計及實現。
1 3-UPS-1-PS機構模型及控制原理
1.1 機構模型
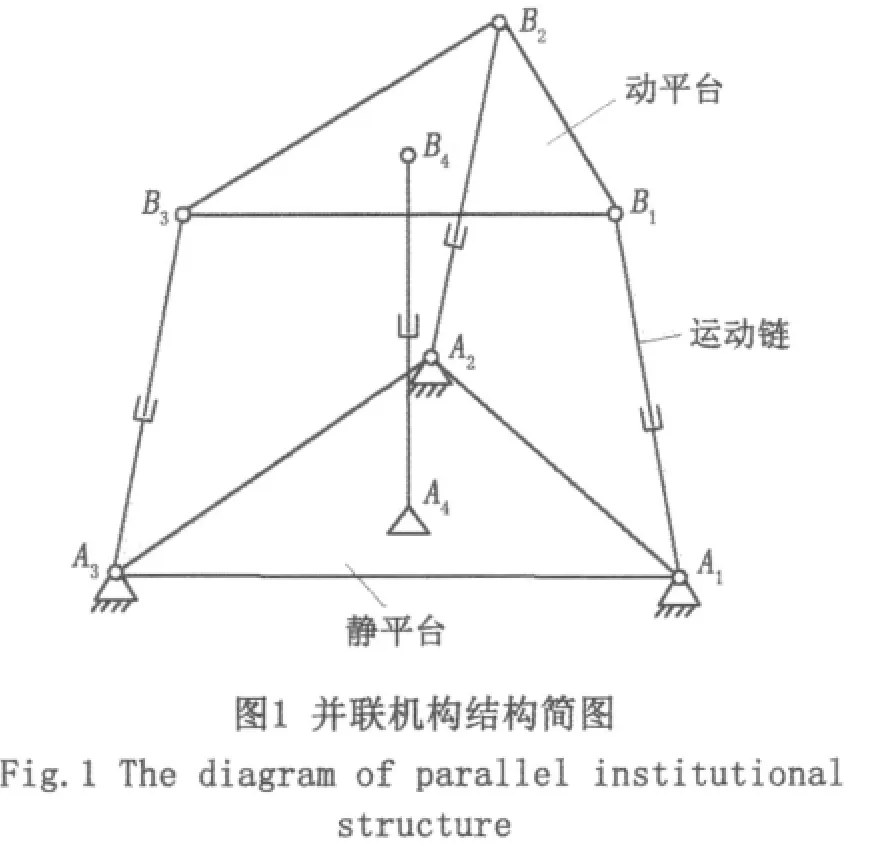
3-UPS-1-PS并聯機構由動平臺、靜平臺、3個UPS支鏈(A1B1,A2B2,A3B3)和 1 個 PS約束鏈(A4B4)組成,見圖1。在3個UPS支鏈上分別裝有電機,電機帶動UPS支鏈上的滾珠絲杠,絲桿通過球副連接到動平臺,從而實現動平臺運動。
根據Kutzbach Grubler公式,空間機構自由度M為

式中:n-空間機構的總構件數;g-空間機構的運動副數;fi-第i個運動副的自由度數;fq-空間機構的局部自由度數。
則本并聯機構自由度M為

其中包括:1個移動自由度,3個轉動自由度。


1.2 硬件組成
該控制系統由NI公司的PCI-7354運動控制卡、UMI-7774(4軸)多功能數據采集卡和松下小慣量全數字式交流伺服電機MSMD-04-Z-P-1-U和自帶的驅動器MBDDT2210組成[3]。系統連接,見圖2。
1.3 控制原理
在動、靜平臺上分別建立動坐標系O'-X'Y'Z'和絕對坐標系O-XYZ,O'O和支鏈A4B4重合,O'B1作 X'軸,OA1作 X 軸,見圖3。
支鏈AiBi(i=1,2,3)與靜平臺的夾角為φ。r1為動平臺外接圓半徑,即動平臺上外接圓周上的鉸鏈中心到外接圓圓心的鉸鏈中心的距離,r2為經平臺外接圓半徑,即靜平臺上外接圓周上的鉸鏈中心到外接圓圓心的鉸鏈中心距離。令{Ci}為動平臺的第i個鉸點在O'-X'Y'Z'中的坐標。由于O'點是動點,故{Ci}為相對坐標,{Ai}為靜平臺的第i個鉸點在O-XYZ中的坐標,即絕對坐標;{Bi}為動平臺的第i個鉸點在O-XYZ中的坐標;[R] 為由O'-X'Y'Z'坐標系到O-XYZ坐標系的旋轉矩陣。則

式中:αi-以O為端點,分別過第i個鉸點和第i-1個鉸點的兩條射線組成的夾角度數。

由式(1)得

設動平臺繞X、Y、Z軸的旋轉角度分別為α、β、γ,則移動參考系變換到固定參考系的旋轉矩陣[R] 為

用齊次坐標矩陣來表示動平臺的位置姿勢矩陣[G] 為

動坐標系O'-X'Y'Z'中的任一點[Q] =[x'y'z'] 中為
{P}={PXPYPZ}為動平臺中心O'在固定參考系中的絕對坐標,在機構中{P}={0 0 PZ},由式(2)得

將式(3)寫成向量形式:

式中:R(Bi)-鉸接點Bi在固定參考系OXYZ中的矢量;R(Ci)-鉸接點Bi在固定參考系O'-X'Y'Z'中的矢量;RP-動平臺中心O'在固定參考系O-XYZ中的矢量。
對式(4)求導得

式中:V(Bi)-鉸鏈點B在固定參考系OXYZ中運動速度;W-動平臺角速度;V-動平臺中心O'在固定參考系O-XYZ中的運動速度。
將V(Bi)向Li投影,可得到第i根桿的長度變化速率(輸入速度)Li'為
式中:ni-沿第i根桿軸向的單位列向量。即

式中:Vm-動平臺運動速度(輸出速度)。J-并聯機器人的Jacobian矩陣,即速度傳遞矩陣。

速度傳遞矩陣表示了支鏈與動平臺的速度映射關系[4-5],通過 LabVIEW 的公式節點功能,將映射方程編輯成模塊,在程序中調用。
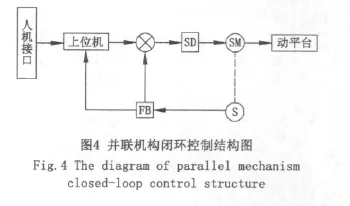
在工作中,并聯機構作為薄板件柔性夾具的結構基礎,為了適應新車型車身骨架總成組焊,需要調整其動平臺位姿,以保證安裝在動平臺上的板件夾具能夠很好的夾緊車身板件。3個電機的單一運動精度和協調運動精度,決定了動平臺位姿調整精度。為此,在控制系統中安裝反饋裝置,形成閉環系統,保證動平臺位姿精度,見圖4。
2 控制系統軟件實現
儀器控制是在儀器和計算機之間發送命令和數據。它需要將儀器與計算機連接起來協同工作,同時還可以根據需要延伸和拓展儀器的功能。完整的儀器控制系統除了包括計算機和儀器外,還必須建立儀器與計算機的通路以及上層應用程序,通路包括總線和針對不同儀器的驅動程序,上層應用程序用于發送命令、儀器的控制面板顯示以及數據的采集、處理、分析、顯示和存儲等[6-7]。
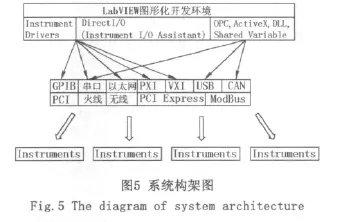
LabVIEW(laboratory virtual instrument engineering workbench)是一種圖形化的編程語言和開發環境,是標準的數據采集和儀器控制軟件。LabVIEW用于儀器控制開發環境的優點:支持多種儀器驅動和總線,提供豐富的接口,支持OPC、ActiveX、DLL調用和網絡通信等。本控制系統程序由虛擬儀器LabVIEW進行編制。其系統構架,見圖5。
3 主要功能模塊介紹
3.1 指令輸出流程
指令輸出程序用于向運動控制卡發送控制命令。當伺服系統通電后,程序定時循環。A1B1,A2B2,A3B3支鏈對應的TF數據由0變1,支鏈被激活,程序自動尋找對應的子VI運行,進行支鏈控制。根據需要可以提前在控制參數界面輸入運動速度倍率或加速度倍率,用于控制支鏈運動快慢。同時支鏈運動還可以在控制界面選擇自動運行或者手動運行,見圖6。
3.2 限位報警流程
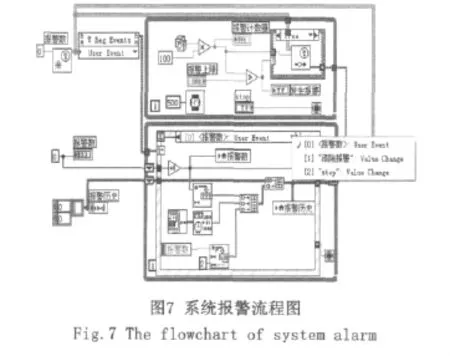
限位報警程序用于接受位置傳感器的反饋信號,判斷支鏈是否超程。在A1B1,A2B2,A3B3支鏈的運動桿件上裝有限位器,在運動過程中,如果運動桿件超出規定位置,傳感器就會發出反饋信號,TF數據由0變1,報警開關自動打開,報警器開始報警。同時,case結構的數據流通過輸出端子,將報警數據進行加法運算依次累加。
機構超出限位,報警器自動報警并且斷電停止機構運動。按住操作界面釋放按鈕、超出限位支鏈對應的操作按鈕,手動向相反方向移動,可進行復位,報警系統此時停止報警,報警計數器自動進行記錄,見圖7。
3.3 人機交互流程
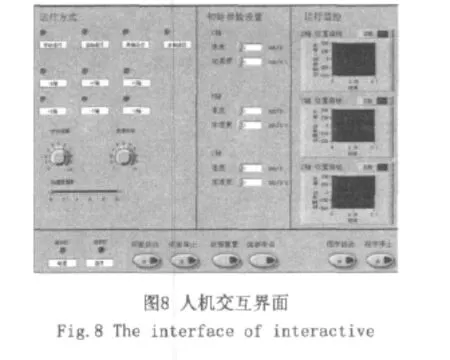
人機交換界面用于設置工作需要得初始參數,程序運行后,初始參數進行數模轉換,硬件系統產生脈沖信號,伺服系統通過將脈沖信號放大控制電機。電機帶動絲桿,使動平臺位姿達到夾具需要的角度。人機交換界面上包括自動運行、手動運行、速度倍率調節按鈕和運行結果監控顯示屏,界面上的 X、Y、Z軸按鈕,分別對應 A1B1,A2B2,A3B3支鏈,見圖 8。
4 仿真實驗
采用本系統軟件對3-UPS-1-PS并聯機構進行控制仿真實驗。首先,運行Max程序,檢測運動控制卡。然后,打開交互界面的啟動按鈕,輸入速度和加速度參數。最后,點擊運行按鈕[8-10]。系統流程見圖9。

為了驗證在LabVIEW系統控制下,并聯機構能夠按照實際工作情況,在規定的運動空間內,靈活、速度的達到目標位姿,通過讓A1B1支鏈運動,使動平臺傾斜30°,觀察動平臺完成實驗過程中,其輸出速度曲線,見圖10。經過試驗,動平臺在達到預定結果后,速度符合工作要求。)通過實驗可證明LabVIEW系統控制下軟硬件的可行性。

5 結束語
仿真實驗表明,基于LabVIEW的3-UPS-1-PS并聯機構控制系統穩定,能夠實現獨立和聯動的控制方式,動平臺輸出速度平穩,可靠。為了完善對動平臺的控制,需要提高系統精度。動平臺的位置精度和誤差修正將是下一步研究方向,最終目標是提高機構的控制精度。該系統具有以下特點:操作簡單,界面友好,操作人員可以對運動參數一目了然。
[1] 郭大杰,沈衛平,胡挺.基于LabVIEW的3-PRRRR移動并聯機構控制系統[J] .機電工程,2010,27(8):49-51.
[2] 于洪健.基于并聯機器人機構的汽車薄板件柔性裝配夾具研究[D] .哈爾濱:哈爾濱工業大學,2010.
[3] 郭慶鼎,孫宣標.現代永磁電動機交流伺服系統[M] .北京:中國電力出版社,2006.
[4] 于淑政,馮繼剛,崔國華,等.3UPS-1S并聯機構的運動學分析[J] .河北工程大學學報:自然科學版,2011,28(3):97 -99.
[5] 徐立軍,何 穎.模糊PID控制結構分析[J] .河北工程大學學報:自然科學版,2012,29(2):71 -74.
[6] 尹一鳴.基于LabVIEW的過程控制實驗平臺設計[D] .合肥:合肥工業大學,2010.
[7] 劉 溯.1T3R并聯機器人設計及其實驗裝置研制[D] .重慶:重慶大學,2006.
[8] 王 南,張莉婷,郝莉紅.空間3-UPU/UPU機構的剛度分析[J] .河北工程大學學報:自然科學版,2012,29(3):85-87.
[9] 叢爽,李澤湘.實用運動控制技術[M] .北京:電子工業出版社,2006.
[10] 陳錫輝,張銀鴻.LabVIEW8.20程序設計從入門到精通[M] .北京:清華大學出版社,2007.
