混凝土拱壩高精度平面三維監測網的建立及質量評價
2012-10-23 03:40:50李軍安
水利規劃與設計 2012年6期
李軍安
(陜西省水利電力勘測設計研究院 西安 710002)
1 概述
西安市輞川河引水李家河水庫工程攔河壩為碾壓混凝土拋物線雙曲拱壩,壩頂高程884m,最大壩高 98.5m,壩頂弧長 351.71m,水庫正常蓄水位880.0m,水庫總庫容為5260萬m3,調節庫容為4400萬m3。水庫壩址處河谷深切呈“V”字型,河道狹窄,河床寬度僅15~30m。兩岸山坡陡峻,荊棘叢生、植被茂密、通行及通視條件較差。
樞紐區平面監測三維控制網的建立是采用Leica TCA機載自動監測軟件實施。該操作系統簡單,測站完成各項設置后,儀器可自動照準各目標點,自動測距、測角,并實時自動檢查各項誤差,超限后自動處理。同時,該系統后處理完善、規范,與之相配套的后處理軟件可以自動生成與規范標準方向觀測記錄手簿完全一致的報表等。
2 平面三維監測網等級的選取
依據 DL/T5178—2003《混凝土壩安全監測技術規范》的規定,大壩安全監測設計報告中明確監測網最弱點位移量中誤差 m位應小于±2.0mm。SL197—97《水利水電工程測量規范》將大壩平面監測三維網劃歸為專用平面控制網,根據精度要求和實際條件確定各級專用平面控制網適用范圍,且明確重力壩、拱壩、支墩壩變形監測、近壩區危巖變形監測、穩定期地形變形監測等應選用專一級平面控制網。專一級網主要技術指標是最弱點點位中誤差 m點。最弱點位移量中誤差m位和點位中誤差m點的關系為:m位=m點,即:混凝土大壩安全監測網的最弱點點位中誤差m點應小于±1.41mm。在水利水電工程樞紐區布置監測網的網形條件受地形地貌限制,只有考慮選擇控制網的觀測等級。SL197—97中,專一級網的最弱點點位中誤差±1.3mm,相當于位移量中誤差±1.84mm,其精度標準與DL/T5178—2003基本相同。那么,李家河水庫雙曲混凝土拱壩平面監測三維控制網的等級及觀測技術要求執行SL197—97中專一級網的規定,可以滿足監測網最弱點位移量中誤差m位小于±2.0mm。
3 大壩平面監測三維網精度估算
根據現場地形及監測對象,聘請設計及地質人員實地進行具體的點位選設,確定大壩平面監測網由基準點和工作基點組成監測控制網,網形如圖1所示。
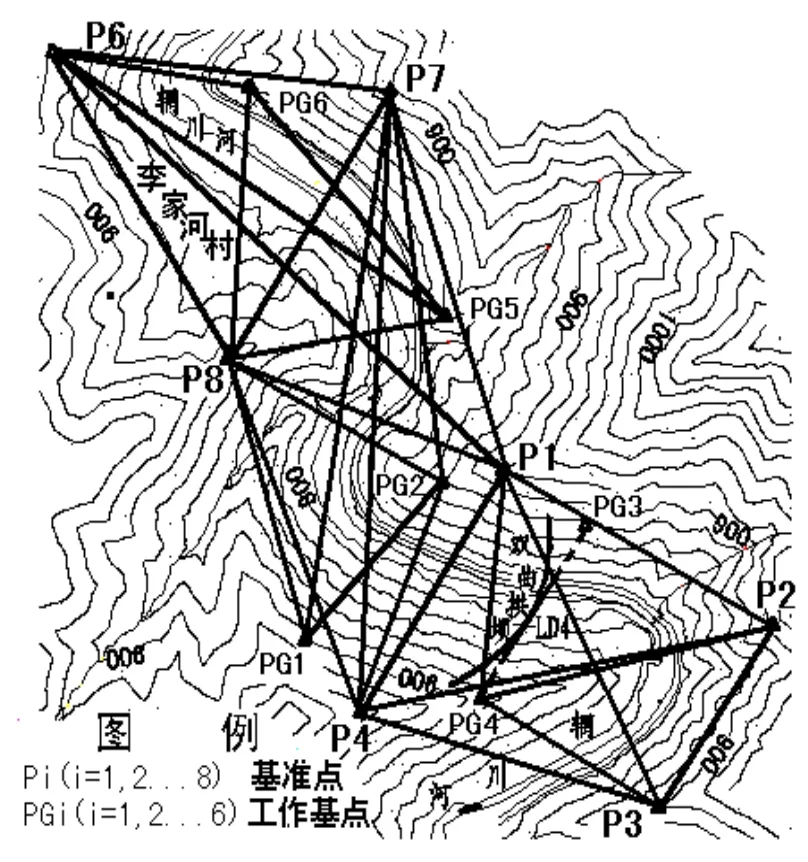
圖1 大壩平面監測三維控制網索引圖
大壩平面監測網形選定后,基準點采用實地測取概略坐標,工作基點從1∶2000地形圖上量取概略坐標。精度估算參數選取:測角中誤差mβ取0.5″,測距中誤差ms取1mm+1ppm·Dkm。采用清華山維《工程測量控制網微機平差系統》軟件,在微機上按邊角全測網進行了精度估算,計算出基準網點位精度、可靠性、靈敏度指標。其中,網中最弱點點位中誤差為±1.10mm,最弱邊相對精度為1/478700,內可靠性R最大值6.63,外可靠性R′最大值6.09。
從估算各項指標結果看,監測三維網采用專一級(mβ=0.5″)時,其最弱點點位中誤差m點完全可以達到±1.41mm的精度要求。
4 點位選取及標志的建造
網中各點均選在基巖或土質堅硬,便于保存的地方。其中:基準點為P1、P2、P3、P4、P6、P7、P8等 7個點,基準點均布置在施工影響范圍之外;工作基點為PG1、PG2、PG3、PG4、PG5、PG6等6個點,分別用以監測壩肩高邊坡、電站廠房背坡及壩頂的水平位移。由于大壩主體正在澆筑中,采用視準軸線法監測拱冠點LD4的右岸工作基點PG3待后設立。
基準點、工作基點均建造鋼筋混凝土觀測墩,觀測墩的地面以下部分埋設至新鮮基巖上或半風化巖層150cm以下。在觀測墩頂面埋設F-1A強制對中基座,基座調整傾斜度小于4′。
5 大壩平面監測三維網外業觀測
采用測量機器人(Leica TCA2003全站儀配套TCA機載自動監測軟件)實現了自動觀測。外業觀測技術要求及作業限差按照 SL197—97專一級平面控制網執行,即:
(1)水平角(采用方向觀測法)、垂直角及斜距均觀測15個測回。由于照準標志數量所限,部分測站水平角進行了分組觀測,分組觀測包括2個共同方向(其中 1個為共同零方向),其兩組觀測角之差如表1所示。其值均小于測角中誤差的2倍(2mβ=±1.0″),按等權分組觀測進行了測站平差。

表1 分組觀測角度之差統計表
(2)采用專用量高游標卡尺在測站、鏡站從三個方向分別量取儀器和棱鏡高度,并取平均值作為儀器高和覘標高。量取高度讀數至0.02mm。
(3)測站、鏡站分別在觀測開始、中間、結束時進行了溫度、氣壓的測定,取均值,并按檢定證書的修正值進行改正。
(4)斜距讀數的中數經儀器加乘常數、氣象后改正后,分別采用往返測垂直角計算測邊高差中數,再利用斜距和高差計算測邊水平距離。
全網測距邊28條,最大邊長819.003m,最短邊長 276.962m,平均邊長 441.482m。外業觀測期間溫度 7.0~27.4℃,網中 28條測距邊垂直角<5°有18個,5~10°有7個,>10°有3個,且測距邊垂直角最大為17°19′。
6 外業觀測數據驗算
兩次獨立外業觀測完成后,分別進行了水平角觀測三角形閉合差、測角中誤差和測距中誤差的驗算。水平角外業觀測成果驗算見表2。
全網測距邊 28條,最大邊長(P1-P6)818.993m,最短邊長(PG1-PG2)276.969m。根據往返測距較差分別計算得:第1次觀測的平均測距中誤差為1.06mm;第2次觀測的平均測距中誤差為 1.05mm,其值均小于規范規定的±2.5mm的要求。

表2 三角形閉合差及測角中誤差統計表
外業觀測數據驗算合格后,采用清華山維《工程測量控制網微機平差系統》軟件,以P1為三維網的坐標和高程起算點(P1-P4邊做為起算方位邊),邊長投影至840m高程面,按固定一點一方位的平面獨立網進行數據處理。首期2次獨立觀測數據處理后精度統計見表3。

表3 首期2次獨立觀測成果精度統計表
7 數據處理及精度統計
從表3精度指標統計結果可以看出,對大壩平面監測三維網首期 2次獨立觀測成果進行比較,其較差均小于2m,達到設計書預期精度指標要求。取首期2次獨立觀測成果的均值作為大壩平面監測三維網的基準值。
8 幾個問題的分析探討
8.1 外業觀測記錄數據分析
(1)通過對外業觀測數據返工的測站觀測數據分析發現:在一個測站內,觀測時間段測量機器人應同時進行方向觀測、測距、天頂距觀測各 15個測回,如果儀器自動重測的測回數超過1/3時,雖然重測后的 15個測回間測回差在限差內,但其觀測數據在參與外業三角形閉合差驗算時,會引起三角形閉合差超限。
(2)在外業觀測過程中,如遇到天氣由晴轉多云,光線強弱產生突變時,測量機器人重測測回數會超過1/3。這種情況觀測質量同樣較差。
(3)觀測方向的垂直角較大時,應選擇在陰天或夜間觀測,觀測質量較好。
8.2 兩次獨立觀測的方向值及測距差值評價
8.2.1 觀測方向值的比較
水平角方向觀測法獨立進行2次觀測,其較差應小于⊿=±2,mβ=±1.0″。經對 12個測站44個觀測方向值(每測站不含零方向)2次觀測方向值統計對比,其較差小于⊿的有22個,占總方向數的50%;較差在~1⊿之間的有15個,占總方向數的34.1%;較差大于⊿=±1.0″的有 7個,且最大值為-1.94″,占總方向數的15.9%。
現行規范只要求首期 2次獨立觀測成果做明確規定,而未對2次獨立觀測水平角的較差作出規定。
8.2.2 觀測距離值的比較
平面三維監測網測距邊 28條,經對首期 2次獨立觀測水平距離較差統計,往返測距較差正負值各占 50%,且僅有 1條邊(P1-PG4邊長294.25212mm)往返測距較差為2.23mm,其它均小于1mm+1ppm。
8.3 水平角觀測測回數對成果質量的影響分析
筆者另行按水平角觀測 12個測回的均值,進行驗算及數據處理結果如表4所示。

表4 12測回的驗算及數據處理結果對比表
從表4可以看出,水平角方向觀測法若采用12個測回,對于大壩平面監測網測角精度是不易達到±0.5″的要求,首期 2次獨立觀測坐標差值也不易達到預期精度指標。
8.4 高精度儀器檢定加乘常數的誤差問題
本次外業觀測過程中,采用 TS30全站儀復測了基準網點 P1、P6、P8等 3個點之間邊長。其中:TCA2003全站儀檢定的加常數C= -1.31mm,乘常數R =-2.09mm/km;TS30全站儀檢定的加常數C = 0.00mm,乘常數R = 0.00mm/km。將兩臺全站儀所測邊長進行了比對,計算統計結果如表5所示。

表5 TCA2003與TS30測量邊長比對表 單位:m
根據檢測樣本結果可以看出:TCA2003和TS30兩臺儀器不考慮儀器加、乘常數改正的話,測距較差很小。如果考慮儀器檢定加、乘常數改正,就涉及儀器檢定的誤差問題。目前,國內哪一家法定檢定單位具備高精度全站儀的檢定技術能力,值得業界同行關注。
9 結論及建議
(1)通過以上質量分析評價,李家河水庫工程混凝土拱壩高精度平面三維監測控制網的建立,嚴格掌控外業觀測過程中的最佳氣象環境,達到了預期理想的精度。
(2)測量機器人雖然實現了外業自動化觀測,替代了人工觀測,減少了人工觀測人為誤差因素影響,但測量機器人自動觀測仍然會受外界作業環境影響。因此,在高精度變形監測網的外業觀測過程中,應嚴格掌控最佳天氣環境,盡可能在陰天或夜間進行觀測。
(3)測量機器人完成一個測站的全部數據測量,一般需要 40~60min。觀測時間段溫度的變化會直接影響測距邊的計算精度。因此,應在測前、測中、測后同時分別測記測站和鏡站的溫度、氣壓,再取中數,以取得準確的氣象改正系數。
(4)為了保證斜距改平精度,采用經氣象改正后的斜距與三角觀測高差計算水平距離。三角觀測高差精度除與斜距、垂直角觀測精度有關外,儀器和棱鏡高度的量取精度也直接影響高差計算精度。本工程專門加工游標卡尺在測站、鏡站從三個方向分別量取儀器和棱鏡高度,并取平均值作為儀器高和覘標高的方法,取得了滿意的效果。
1 工程變形監測分析預報的理論與實踐.(ISBN 978-7-5084-5993-6).北京:中國水利水電出版社.
2 SL197—97水利水電工程測量規范.北京:中國水利水電出版社.
