邢家渡灌區泥沙清淤自動化裝備研制
2012-10-23 07:29:42蘇紅魯張擴成張厚芹
山東水利 2012年10期
蘇紅魯,張擴成,張厚芹
(濟南市邢家渡引黃灌溉管理處,山東 濟南 250100)
為增強邢家渡引黃灌區渠道的引、排、蓄、供等功能,改善水環境質量,加快建設現代新農村、推進城鄉一體化步伐,針對邢家渡引黃灌區泥沙沉積問題,通過計算流體力學研究泥沙在設計條件下的流動特性和行為,進行了清淤自動化裝備設計研究,為預測泥沙清淤的運行效果和結構的改進提供了一種有效手段。
1 背景和意義
由于邢家渡灌區沉沙池的嚴重淤積、廢棄,給鄉村帶來了一系列嚴重惡果。
1)種植業用水受到威脅。一部分依靠邢家渡灌區灌溉的農作物輕則干旱減產,重則荒蕪失收。同時,由于邢家渡灌區的蓄灌能力降低,大幅度增加了農用機具提灌莊稼用水的費用。
2)制約了農業產業結構的調整。由于邢家渡灌區的容水量不斷下降,嚴重影響了農業產業結構調整計劃的實施。
3)水土保持作用減弱。蓄水蓄沙、緩沖能量、減輕山洪對泥沙的沖刷,是邢家渡灌區水土保持的主要工程措施之一。由于邢家渡灌區的淤積和廢棄,蓄水容積減少,對山洪抵抗能力明顯減弱。
2 國內外清淤機械現狀和發展趨勢
同造船業一樣,疏浚業源于歐美。1660年鏈斗式挖泥船的雛形“泥碾船”在荷蘭首創獲得成功;1855年美國人制成莫爾茨將軍號吸揚式挖泥船,用于開挖南卡羅來納州查爾斯頓港的攔門沙;1869年荷蘭制成吸揚式挖泥船,用于蘇伊士運河工程。隨著西方國家工業化和世界經濟的發展,石油輸運、集裝箱輸運、河海聯運等推動了世界港口和航道的建設,疏浚設備也因此得到快速發展。目前,應用較先進的有絞吸式挖泥船和耙吸式挖泥船。
在我國,交通系統擁有大中型的疏浚設備,以耙吸式和絞吸式挖泥船為主,數量不多但分布相對集中,疏浚能力較強。水利系統則以中小型挖泥船居多,各種類型應有盡有,數量龐大,分布在全國各地。目前我國常用的清淤機械有兩棲式清淤機、兩棲絞吸式清淤機、長臂自航式清淤機、水管道清淤機、機井清淤機、水力挖泥機、淺魚池人工牽引船體式清淤機、螺旋滾筒潛水式清淤機、旋輪式水下清淤機、半旱式清淤機等。
雖然國內的清淤機種類很多,但主要以機械式作業為主,采用斗輪式和絞吸式。存在以下問題:1)功率大、能耗高,挖泥淺,一般只能挖深5~15 m的疏松泥砂和土層;2)旋轉構件多,如斗輪、絞刀和砂泵等構件磨損嚴重,更換頻繁,維修量大,運行成本高,設備管理復雜;3)用機械式斗輪、絞刀破碎水下土巖,造成水質變壞,污染環境。
3 引黃灌區自動化清淤設備主要技術指標
邢家渡引黃灌區泥沙清淤自動化設備主要技術指標及總體要求:1)渠道深度為3 m;2)渠道下口寬為20~22 m;3)渠道上口寬為 30~35 m;4)渠道內水深為1.5 m;5)淤泥厚度≤1.5 m;6)清淤設備準備就位時間≤3 min;7)驅動控制方式為液壓式;8)整個清淤裝備機動靈活,效率高、操作維護方便,適應性較強。
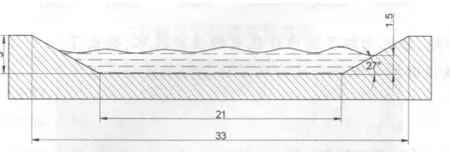
圖1 邢家渡引黃渠道斷面
4 泥沙清淤自動化裝備結構設計
要機動、靈活、高效地實現灌渠泥沙清淤工作,研究、設計合理的結構部分至關重要。在初步設計的4套方案中,經三方領導專家的反復論證,并在Solid Edge平臺上繪制出了三維結構圖樣,從操作及維護保養方便程度、性價比、可靠性、穩定性、實用性等方面綜合考慮,最終確定了一套理想可行的方案。
調查得知,戰壕挖掘機主要用于挖掘反坦克壕、交通壕、野外指揮所及技術兵器掩體等。車前裝有推土鏟,還可用于平整場地和回填平底坑。
在充分調研分析戰壕挖掘機和國內外水下機器人資料的情況下,提出了一種新型的水下清淤機器人的方案,如圖2所示。該方案是將耙形推土鏟、工作平臺、雙向旋轉清淤裝置和動力驅動等部分全部安裝在一輛特制的橡膠履帶車上,通過遙控方式控制泥沙清淤自動化裝備的行走和清淤作業。具體方案為:
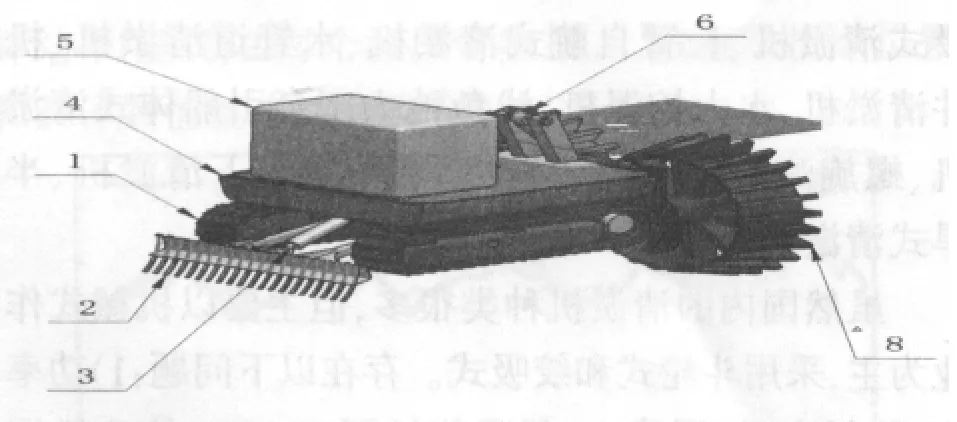
圖2 水下清淤機器人結構-工作狀態
1)為防止整個清淤設備在行走或工作時損壞壩面,采用液壓挖掘機底盤技術和加寬帶襯塊的橡膠履帶,這樣在保證履帶有足夠的強度和耐磨性的同時,保護壩面,如圖3所示。
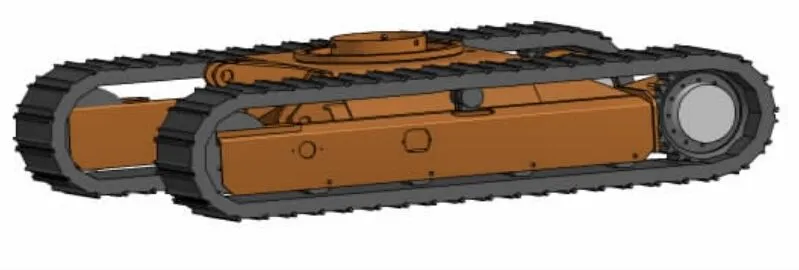
圖3 水下機器人底盤行走裝置(橡膠履帶)
2)清淤設備前端設計可仰俯的耙形推土鏟,工作時可將水渠內的樹枝和大石塊推開或者集中起來,為后面的泥沙攪動掃清障礙,如圖4所示。
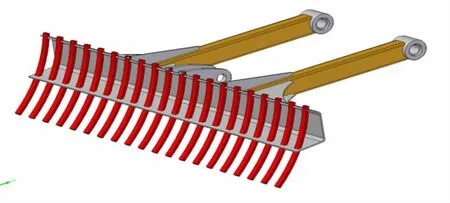
圖4 水下機器人耙形推土鏟
3)創新性地設計了雙向旋轉泥沙清淤裝置,可將泥沙旋轉攪動起來,順水流沖走,如圖5所示。

圖5 雙向旋轉泥沙清淤裝置
5 結語
根據邢家渡引黃灌區目前存在的清淤難題,提出了針對邢家渡引黃灌區的攪沖式清淤技術,并深入研究了符合邢家渡引黃灌區的技術目標的自動化清淤裝備。裝配具有如下特點:1)該設計中融入了先進的機器人設計思想,整體結構緊湊,自動化程度高;2)設計時充分考慮了渠道的實際情況,設計了前端耙形推土鏟,專門清理水渠中的樹枝及大塊物體;3)充分借鑒了軍用戰壕挖掘機的設計思想,創新性地設計了新型雙向泥沙清淤裝置,可充分地將泥沙攪動起來,達到清淤效果;4)由于該水下清淤機器人可以根據實際情況靈活定位,所以整體結構尺寸較小、重量較輕,移動、定位方便,機動靈活;5)只需一名操作人員,即可完成整個清淤過程。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
藝術啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年11期)2018-08-04 03:26:08
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
工業設計(2016年12期)2016-04-16 02:52:00
設備管理與維修(2015年12期)2015-04-09 06:57:00