基于軸角轉換的火炮伺服測試技術
2012-10-25 12:38:48楊傳順
中國測試 2012年6期
關鍵詞:示意圖
楊傳順,段 超,江 楠
(江蘇自動化研究所,江蘇 連云港 222006)
0 引 言
典型的火炮應用系統中,由雷達或光電自動跟蹤空中目標,同時將目標的距離、方位角、高低角等數據實時地傳送給火控計算機,后者算出目標飛行的速度、航向以及火炮瞄準目標進行射擊所必須的提前量,然后控制火炮伺服系統進行相應的方位角和高低角轉動,帶動炮身向預定的方向射擊。因此,伺服系統對于火炮實現自動瞄準、精確打擊、大面積的瞬時密集火力壓制具有重要的現實意義,而對于火炮伺服的測試則是用于驗證火炮的瞄準精度、實時響應速度、可靠性等不可或缺的環節[1-2]。
自整角機作為角度測量的傳感器,由于其精度高、分辨率好、可靠性高、應用簡單等特點被廣泛用于火炮伺服控制系統中,作為控制火炮轉動的伺服電機。本文提出基于軸角轉換的火炮伺服系統測試技術,以達到測試火炮伺服的轉動精度、靈敏度和響應速度等目的[3]。
1 系統體系結構
火炮伺服控制炮身的轉動主要是通過火炮的架位來實現,架位分為方位和高低,即火炮在兩個垂直方向上的角度轉動。
基于軸角轉換的火炮伺服測試系統體系結構示意圖如圖1所示,主要由微處理器(或PC機)和數字-自整角機轉換器組成。通過微處理器裝定數字信息,然后由數字-自整角機轉換器把數字量角度信息轉換為模擬量角度信息,即輸出方位角(粗精雙通道)和高低角(粗精雙通道),然后傳送給火炮的伺服系統,帶動火炮炮身做相應的角度轉動。該軸角測控系統,可模擬輸出多種速比的自整角機信號,具有等速、正弦、階躍等多種運動形式,采用鍵盤操控,實時角度顯示,具有輸出功率大、動態輸出頻率高、操作靈活、功能完備等特點。

圖1 火炮伺服測試系統示意圖
2 數字-自整角機信號轉換器
自整角機是一種感應式同步微型電機,它廣泛用于顯示裝置和伺服控制系統中,使機械上互不相連的兩根或多根轉軸能夠自動保持相同的轉角變化。自整角機一般采用三相繞組方式,基本結構包括一個轉子和3個能夠旋轉的定子線圈繞組;轉子上放置單相激磁繞組,轉子有凸極結構,也有隱極結構;3個定子繞組成Y型排列,兩兩之間的夾角為120°。按照用途和工作原理劃分,自整角機可以分為力矩式和控制式兩種。力矩式自整角機主要用于自動指示系統中,可以遠距離傳輸角度信號;控制式自整角機主要用于隨動系統中,作為檢測元件將轉角信號轉換為電信號[4]。
自整角機主要實現兩種功能:一是將輸入的機械轉角信號按照指定函數關系轉換為電信號;二是將輸入的電信號按照指定函數關系轉換為機械轉角信號。它們都經常應用在同步伺服系統中,使遠距離的多個機械轉軸能夠精確地保持相同的轉角變化或同步變化,實現角度位置的遠距離傳輸和轉換。
把數字量轉換為自整角機信息以驅動自整角機做相應的角度轉動,常見的是采用專用的數字-軸角轉換器。
SZZ系列轉換器是一種全電子的自整角機模擬輸出裝置[5],其功能是將輸入的數字全角量轉換成自整角機形式的模擬電壓輸出。轉換器的數字輸出具有鎖存和過勢保護功能。同時,轉換器設計中增加了電流限制電路,防止由于過載或者輸出波形畸變而導致轉換器拉偏某一電源,大大提高了可靠性能。
SZZ轉換器的原理圖見圖2所示。主要由參考變壓器、正余弦乘法器、象限選擇開關、功率放大器、輸出變壓器等組成。輸入的參考信號經參考變壓器隔離降壓,給正余弦乘法器提供參考信號;數字角度量輸入,經數字鎖存器把低12位或14位數字量送到正余弦乘法器,把高2位數字量連接到象限選擇開關,以形成全角量的正、余弦模擬信號,經過功率放大器進行放大,最后由輸出變壓器升壓隔離形成三線自整角機信號輸出。
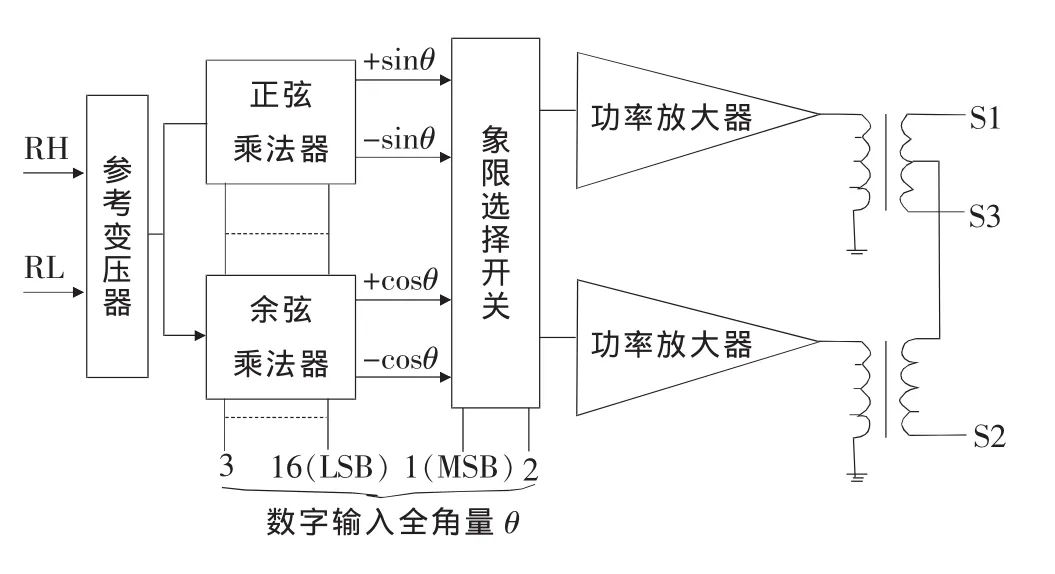
圖2 數字-自整角機轉換器工作原理圖
假設輸入的參考電壓為:Vref=E0sin(ωt),E0為參考電壓的幅值,則輸出的自整角機信號為
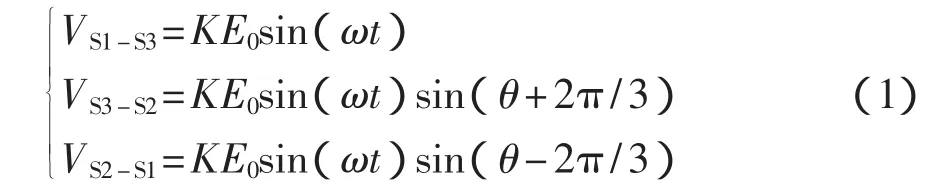
式中:K——輸出變壓器的變化。
除此外還有過熱保護電路,主要是對功率驅動部分的電路提供過熱保護,在功率驅動器溫度達到120℃時,過熱保護電路啟動,關閉功率驅動器的輸出;當溫度下降到120℃以下后,過熱保護電路關閉,功率驅動器自動恢復放大功能。
3 火炮伺服測試技術
對火炮伺服的測試主要通過伺服帶動炮身做一系列的軌跡運動,驗證自整角機轉動的精度、靈敏度和響應速度。這些典型的運動軌跡參數可以手工隨時裝定,也可以以模擬訓練題的方式由軟件程序預先存儲在微處理器中,當對火炮伺服做測試時,只需裝入相應題號即可。然后對照伺服系統的實際轉動輸出角度值和理論輸出角度值,進行誤差的統計和分析,從而達到測試目的。
3.1 數值解碼

粗精通道相應位數所對應的分辨率如表1所示。
粗精通道分別按照圖2中所示的數字-自整角機信號轉換原理進行轉換,然后驅動伺服做相應的角度旋轉。
3.2 運動測試
常見的對火炮伺服的運動測試主要有階躍運動測試、方波運動測試、步進運動測試、等速運動測試、正弦運動測試等[5]。
3.2.1 階躍運動測試
階躍運動測試指輸出某一固定的靜態角度,粗、精通道同時輸出。對應于在微處理器中裝定一個靜態數字量角度,或者求解一個靜態題目。
3.2.2 方波運動測試
方波運動測試指從某一指定初始角位置開始,火炮以一定的振幅和周期做階躍運動。運動軌跡為方波曲線,示意圖如圖3所示,其中θ為初始角度,A為振幅,T為周期。
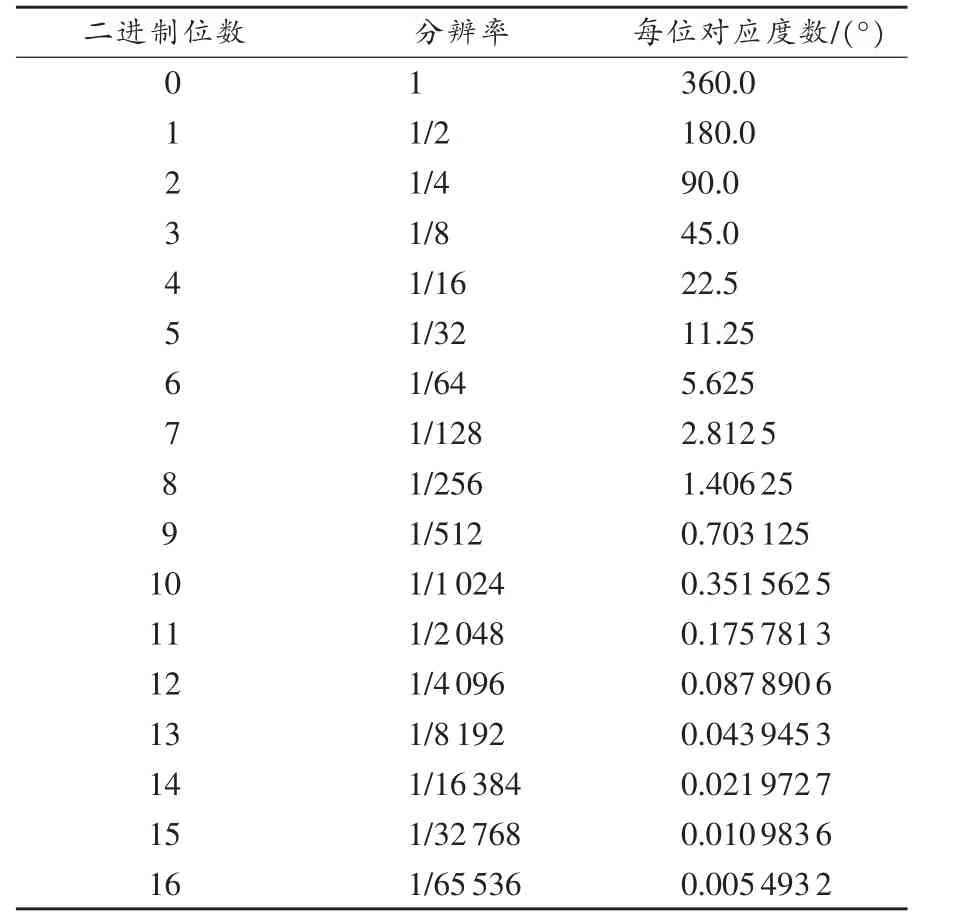
表1 數字量角度分辨率對應表

圖3 方波運動曲線示意圖
3.2.3 步進運動測試
步進運動測試指從某一指定初始角位置開始,以一定步幅,通過鍵盤操控或者以預先設定的固定頻率,做遞增或遞減的運動,此時粗、精通道可單獨步進。運動軌跡呈階梯曲線,示意圖如圖4所示,其中θ為初始角度,A為步幅)。
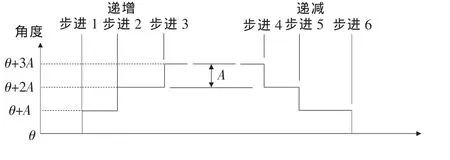
圖4 步進運動曲線示意圖
3.2.4 等速運動測試
等速運動測試指從某一指定初始角位置開始,測試系統的輸出角度按預先設定的固定轉速增加或減少。等速運動可分為限位等速和不限位等速,不限位等速運動曲線示意圖如圖5所示,其中V為速度,T為加、減速時間,伺服啟動和暫停時均有加減速過程。退出等速時無減速過程,速度立刻降為零。
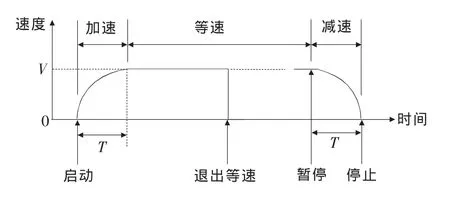
圖5 不限位等速運動曲線示意圖
限位等速運動又分為周期性限位等速和非周期限位等速,此時需要設定上限角和下限角參數。周期性限位等速運動啟動后,輸出角等速運動到上限角,停幾秒(由軟件設定),再調轉運行到下限角,再停幾秒,再調轉運行到上限角,如此周期性運動。
3.2.5 正弦運動測試
正弦運動測試指從某一指定初始角位置開始,測試系統的輸出角度以一定振幅和周期做正弦變速運動。啟動和暫停時均有加、減速過程,退出正弦(即剎車)時無減速過程,速度立刻降為零,運動曲線示意圖如圖6所示,其中θ為初始角度,A為振幅,T為周期。
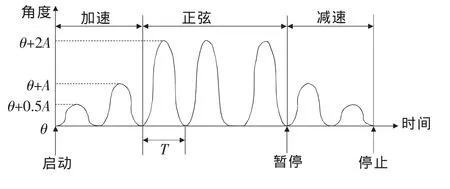
圖6 正弦運動曲線示意圖
在正弦運動開始和結束時分別有加速和減速運動過程,這個過程通常都采用正弦加速和正弦減速,這段時間的大小取決于火炮運動的速度、加速度、有效行程等多種因素,綜合考慮,一般情況下為保證火炮的等速有效行程,該時間盡可能小[9]。
3.2.6 動態輸出速率變化
為保證在等速、正弦運動中信號輸出的連續性,本測試系統采用硬件加密(此處加密指轉角變化率變小,相鄰兩個轉角的差距減小,密度增加)技術,使信號的動態輸出頻率始終以最低分辨率隨角速度變化,粗、精通道的輸出頻率可按式(2)計算[10]。

式中:N——速比;
Φ——角速度。
3.3 火炮的機械限位
當對伺服做測試運動時,裝定的數字量信息需要考慮火炮的機械限位,火炮的機械限位包括方位上的和高低上的機械限位,它們決定了火炮的有效運動范圍,測試系統輸出的角度信號不能超過該范圍。
特別是在等速、正弦運動開始前,需要將火炮調整到合適的初始角位置,以正弦運動為例,運動范圍不能超過機械限位,中心角和初始角之差為正弦運動振幅,示意圖如圖7所示。同樣在等速運動中,上下限角也要在有限運動范圍內,同時還要注意運動方向。例如,在非周期限位等速運動中,當火炮轉到上限角停止后,這時只能反轉,繼續正轉將超限。
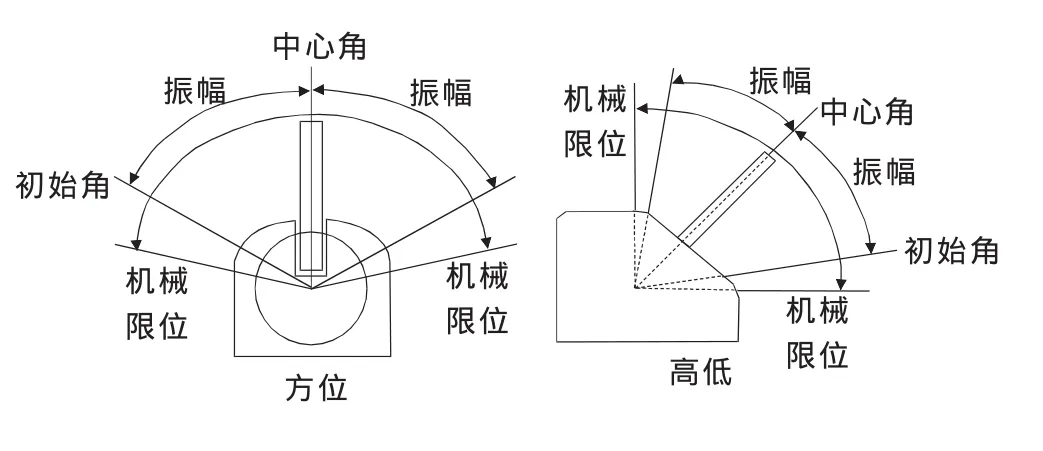
圖7 火炮的正弦運動限位示意圖
4 結束語
該伺服測試系統因其結構簡單、性能穩定可靠、操作方便等優點,已在多個艦炮火控系統中得到了應用和推廣,測試效果良好,使火炮伺服的可維修性和可測試性得到了很大的提高。同時對于采用自整角機作為伺服電機的角度控制系統的穩定性和可靠性檢測,具有很好的示范作用。
[1]江秀紅,董寧.粗糙集模糊神經網絡在火炮伺服系統中的應用[J].火炮發射與控制學報,2008(1):23-26.
[2]李靜,王軍政,汪首坤,等.基于雙靶面的火炮動態穩定精度測試方法[J].儀器儀表學報,2010(10):2328-2333.
[3]劉德耀,閆偉杰,趙巖.數字艦炮隨動系統精度測試分析[J].測試技術學報,2010(6):471-475.
[4]魯迎春,陳凌濤,黃飛,等.高精度自整角機軸/角測量系統設計[J].微電機,2011(4):47-49.
[5]中國重工江蘇杰瑞電子有限公司.軸角型轉換模塊產品使用手冊[Z].2009.
[6]呂云峰,羅明西,何華強.基于RDC模塊的角度測量儀的設計與實現[J].海軍工程大學學報,2011(3):77-82.
[7]王玉松,高歡,劉連生,等.雙通道數字伺服系統在航空測試中的應用[J].自動化與儀表,2011(11):53-56,60.
[8]袁文,劉廷章,張國平,等.力矩電機伺服系統性能測試技術研究[J].微電機,2010(12):87-89,104.
[9]劉亞靜,王治國,楊貴杰,等.基于FPGA的交流伺服驅動系統的設計與實現[J].微電機,2011(2):39-43.
[10]樊留群,萬德科.伺服系統性能測試臺的研究與開發[J].電機與控制應用,2010(7):16-19,27.
猜你喜歡
《學習方法報》歷史中考版(2023年21期)2023-11-09 07:40:38
數學小靈通(1-2年級)(2020年9期)2020-10-27 03:24:18
當代貴州(2019年41期)2019-12-13 09:28:56
娃娃樂園·3-7歲綜合智能(2016年1期)2016-10-25 09:32:48
中國共青團(2015年7期)2015-12-17 01:24:38
中學生數理化·八年級物理人教版(2014年1期)2015-01-09 08:50:45
中國扶貧(2014年8期)2014-06-27 15:33:39
中國扶貧(2014年8期)2014-06-27 04:09:02
中學生數理化·八年級物理人教版(2014年2期)2014-04-02 08:50:44
能源(2014年3期)2014-03-27 09:55:20
