基于NuMicro M0516的超聲波電動機驅動電路設計
2012-10-31 06:53:26皮文苑鹿存躍
微特電機 2012年4期
關鍵詞:信號
皮文苑,鹿存躍,楊 明
(上海交通大學,上海 200240)
0 引 言
超聲波電動機利用壓電材料的逆壓電效應及定轉子間的摩擦作用,將電能轉換為機械能。超聲波電動機特殊的工作機理使其與傳統的電磁電機相比,具備許多優點,如:結構緊湊、低速大力距、無電磁干擾、動態響應快等。超聲波電動機已廣泛應用在微型機械、精密儀器、航空航天、醫療器械等諸多領域[1]。
超聲波電動機驅動電路一般由信號發生、功率放大、匹配電路等部分組成。信號發生是驅動電路的核心部分,一般是用 MCU、DSP或壓控振蕩器(VCO)等數字電路實現。由于DSP偏重于算法,且價格較高,用于電機驅動性價比不高[2]。而采用壓控振蕩器產生信號,需外加分頻分相電路,且電參數調節不便,故壓控振蕩器也不是很合適[3]。與上述兩種相比,MCU不僅具有高運算速度、能實現精確控制的優點,而且價格低廉,非常適合于用作驅動電路的信號發生器。
本文以NuMicro M0516微控制器為核心,研制了一款超聲波電動機驅動電路,并詳細地介紹了系統硬件的組成和工作原理,同時給出了系統軟件程序的設計思路。
1 系統硬件設計
1.1 總體結構
本文研制的超聲波電動機驅動電路結構如圖1所示,系統由M0516接收PC串口發送的頻率、相位差、占空比等控制信號,產生四路互差90°的同頻方波信號,經光耦隔離電路、開關管驅動電路、推挽逆變電路,得到兩路相差90°的高壓功率方波信號。此方波信號含有豐富的諧波成分,需通過匹配電感濾去高次諧波,得到驅動超聲波電動機所需的兩路相差90°的高頻高壓正弦信號。下面分別介紹各部分電路的構成及功能。

圖1 超聲波電動機驅動電路結構框圖
1.2 微控制器
控制部分是整個驅動電路的核心。微控制器采用了NuMicro M0516,它是一款NUTOVON新推出的基于ARMCortex-M0核的32位單片機,其內核可運行至50 MHz,執行速度快、存儲量大、功能強大且價格很低廉。
M0516利用其內部集成的PWM發生器產生四路互差90°的同頻方波信號。每個PWM發生器包括兩個16位計數器、兩個16位比較器及一個可編程的死區發生器,可產生兩路帶死區的方波信號。其中計數器用于控制方波信號的頻率,比較器用于控制方波信號的占空比。此外該計數器和比較器都具有緩存功能,即在當前周期的任意處改變計數器或比較器的初始值,該值在下一周期開始時才被更新。本文正是利用該緩存功能實現方波信號的相位差控制與調節。
M0516輸出的方波信號的頻率f、頻率分辨率If、占空比D、占空比分辨率ID及相位差分辨率Ip分別:
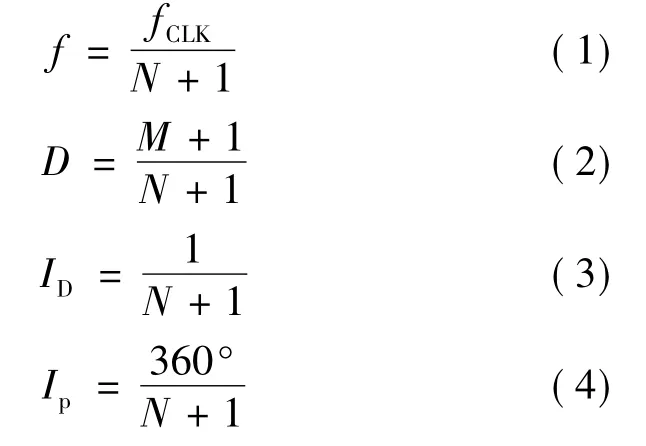
式中:fCLK為時鐘頻率,范圍為4~50 MHz;N為計數器初始值,考慮到中斷響應時間,范圍為10~65535;M為比較器初始值,范圍為0~65535。因此M0516輸出的方波信號的頻率范圍為61 Hz~5 MHz,占空比范圍為0~100%,相位差范圍為0°~360°,且當方波信號頻率為40 kHz時,頻率分辨率為32 Hz,占空比分辨率為0.08%,相位差分辨率為0.288°。
1.3 功率放大電路
為防止功率放大電路對控制部分的干擾,需在功率放大前進行光耦隔離。功率放大電路可用推挽逆變、半橋逆變或全橋逆變實現。與半橋逆變、全橋逆變相比,推挽逆變電路具有結構簡單、所用器件少、通態損耗低的優點,特別適用于電源電壓較低的場合[4]。
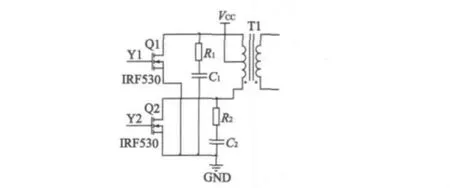
圖2 推挽逆變電路
如圖2所示,推挽逆變電路由兩個開關管和變壓器組成,兩個開關管在互補方波信號的控制下周期性交替導通,在變壓器原邊產生相反的電流,在副邊感應出交變的電壓信號。根據超聲波電動機的功率和工作頻率,開關管選用MOS管IRF530。在圖2中,Y1、Y2為開關管驅動電路輸出的兩路互補方波信號;電阻R1和電容C1構成吸收電路,用于防止變壓器漏感產生的尖峰電壓對開關管產生過壓沖擊。
1.4 開關管驅動電路
為保證開關管的快速導通,驅動電路應能提供足夠大的充電電流,使柵源間電壓迅速上升到所需值且不產生震蕩。在導通期間,驅動電路應能保證柵源間電壓保持穩定,使開關管可靠導通[5]。
IR4427是一款MOSFET專用驅動芯片,其輸出電壓為 6~20 V,輸出峰值電流為 1.5 A,可將M0516輸出的5 V方波信號轉換成開關管IRF530所需的驅動信號。在圖3中,X1、X2為光耦隔離輸出的兩路互補方波信號;電阻R3、R4是為了防止電路中的寄生感抗和開關管結電容發生諧振,避免導致開關管柵極產生震蕩尖峰;電阻R5、R6是為了防止開關管的高輸入阻抗耦合噪聲信號給開關管,避免導致開關管異常開通;穩壓管Z1、Z2是為了保證開關管柵源電壓的穩定,且防止柵源電壓過高導致的開關管失效;二極管D1、D2是在開關管關斷時,為柵極電荷提供低阻抗放電回路,提高開關管的關斷速度。
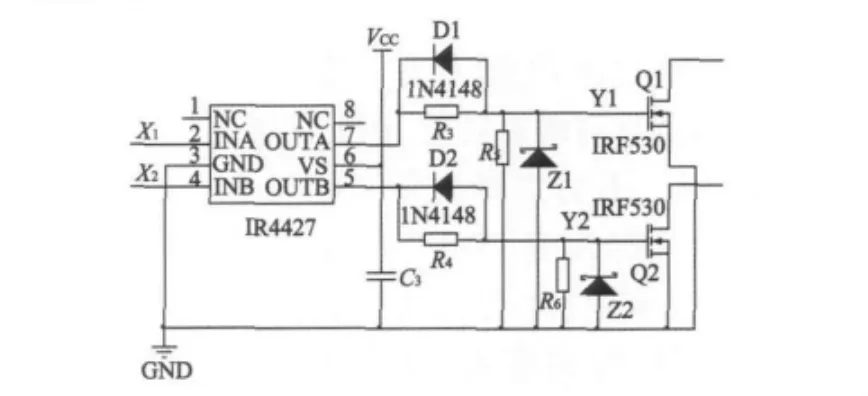
圖3 開關管驅動電路
1.5 匹配電路
推挽逆變電路產生的兩路相差90°的功率方波信號,需經過匹配電路,濾掉諧波成分,并減少無功損耗,才能較好地驅動超聲波電動機。由于超聲波電動機在諧振頻率附近工作時呈容性,一般采用串聯電感進行匹配。串聯電感值計算如下:

式中:ω為電機諧振角頻率;R為定子機械損耗的等效電阻;C為電機夾持電容;L為匹配電感。
2 系統軟件設計
主程序流程如圖4所示。該程序主要實現兩部分功能,一部分是串口通訊,另一部分是產生四路互差90°的同頻方波信號。串口通訊是為了向M0516發送方波信號的頻率、相位差、占空比等控制信號,便于實現調頻、調相和調壓。這里主要介紹四路互差90°的同頻方波信號的軟件實現。
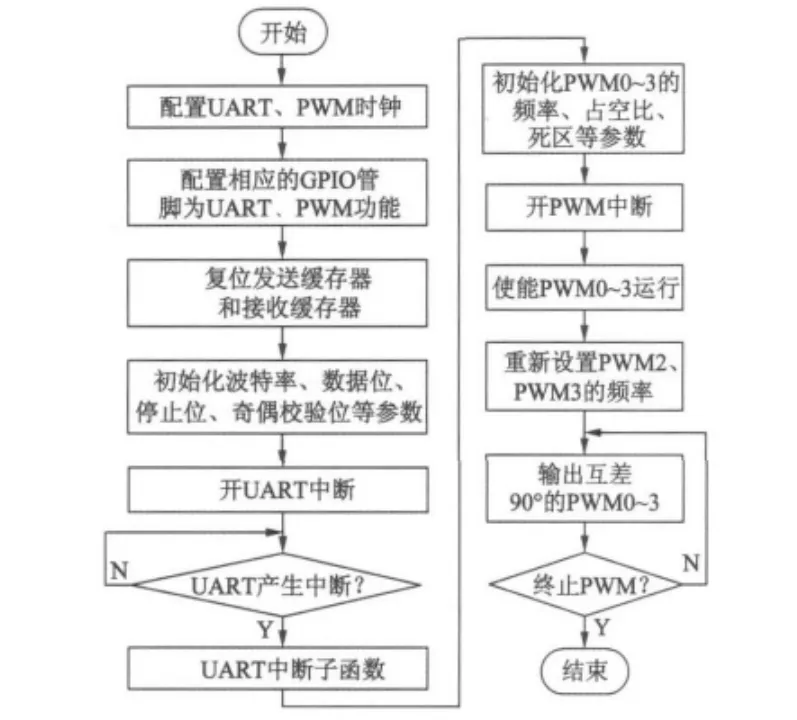
圖4 主程序流程圖
1.2 節中已提到方波信號的頻率是由計數寄存器的值控制,方波信號的占空比是由比較寄存器的值控制。下面介紹方波信號的相位差實現。
如圖5所示,首先初始化PWM1的頻率為f1,PWM2的頻率為,即PWM2周期為PWM1周期的倍,然后使能PWM1、PWM2同時運行,最后重新將PWM2的頻率設置為 f1。由于 1.2節中提到PWM計數器具有緩存功能,因此使能PWM1、PWM2同時運行后,不會立即更新PWM2的計數器初始值,即不會立即改變PWM2的頻率,只當PWM2的一個周期完成時,才會自動改變PWM2的頻率,使其與 PWM1的頻率相同。因此PWM2相對于PWM1在相位上相差90°,頻率仍然相同。由上述分析可知,只要調整PWM2最初的頻率,便可產生不同的相位差。綜上所述,M0516可產生一定頻率、相位差及占空比的方波信號,且頻率、相位差及占空比可調。
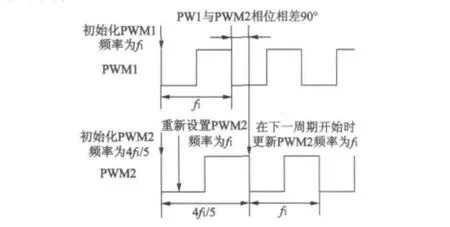
圖5 兩路相差90°的方波信號示意圖
3 實驗結果
圖6(a)驅動電路實物,該驅動電路可產生兩路具有一定相位差的高頻高壓正弦信號,能較好地驅動超聲波電動機,且能方便地實現調頻、調相和調壓。用此電路驅動Φ60超聲波電動機,驅動信號頻率為40.8 kHz,實驗結果如下:圖6(b)為四路互差90°的開關管驅動信號,峰峰值為10 V;圖6(c)為不帶電機時驅動電路輸出的兩路相差90°的方波信號,峰峰值約為180 V;圖6(d)為帶電機時驅動電路輸出的兩路相差90°的正弦信號,其峰峰值約為370 V。

圖6 驅動電路實物及實驗結果
4 結 語
本文設計了一款基于NuMicro M0516的超聲波電動機驅動電路,從硬件和軟件兩方面介紹了該系統,并進行了驅動實驗。該驅動電路采用M0516作為控制器,不僅能方便地實現調頻、調相和調壓,而且將信號發生、分頻分相、占空比、死區設置等功能都整合到M0516中,極大地提高了電路的穩定性與可靠性,縮小了電路的體積。此外該驅動電路成本低,通用性強,有利于市場化和產業化。
[1]胡敏強,金龍,顧菊平.超聲波電機原理與設計[M].北京:科學出版社,2005,1 -20.
[2]段小匯,莫岳平,張新星.基于ARM的超聲波電動機嵌入式驅動控制系統[J].微特電機,2009,37(12):59 -60,69.
[3]王波,郭吉豐.基于低通濾波的新型超聲波電機控制系統[J].浙江大學學報,2011,45(1):157 -162.
[4]張華,曹祥紅.小型化超聲波電動機驅動控制器設計[J].微特電機,2008,36(11):47 -49.
[5]樂曉蓉,王念春.基于IR2103的方波逆變電路設計與分析[J].電源技術應用,2009,12(2):30-32.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
