艦載火箭彈彈道重構(gòu)與模型驗證
2012-11-12 08:04:00丁傳炳胡一峰
中國艦船研究 2012年6期
丁傳炳 胡一峰 陶 勇
中國艦船研究設(shè)計中心,上海 201108
0 引 言
為了提高火力系統(tǒng)的設(shè)計和估計精度,根據(jù)試驗飛行數(shù)據(jù),應(yīng)用各種統(tǒng)計濾波方法重構(gòu)火力系統(tǒng)的飛行狀態(tài),可以更精確地校訂系統(tǒng)的仿真模型。文獻[1-2]將擴展卡爾曼濾波(EKF)應(yīng)用到了炮彈質(zhì)點彈道模型的參數(shù)估計中,得到了較好的估計效果。但擴展卡爾曼濾波在對非線性函數(shù)進行線性化的過程中,需要對高階項采用忽略和逼近的措施,而這樣勢必存在高階項截斷誤差,使得濾波算法不穩(wěn)定。另外,擴展卡爾曼濾波需要計算Jacobin矩陣,其求解計算量較大,特別是對于六自由度的彈道模型,Jacobin矩陣的計算更是復(fù)雜。而采用無跡卡爾曼濾波(UKF)算法直接應(yīng)用于非線性系統(tǒng)則避免了引入線性化的誤差,從而可提高濾波精度,而且算法也較易實現(xiàn)。
運用仿真手段來考核武器的性能,其前提條件是要對仿真模型進行驗證。仿真模型驗證[3-4]是通過比較模型結(jié)果與實際系統(tǒng)運行結(jié)果的偏差來表示模型準確度,由于實際系統(tǒng)所處環(huán)境的復(fù)雜性和科學(xué)理論的局限性,要使仿真模型系統(tǒng)與實際模型系統(tǒng)的行為完全一致不現(xiàn)實,但二者所表現(xiàn)出的特性應(yīng)該基本相同[5]。本文將利用UKF算法,結(jié)合GPS觀測數(shù)據(jù),對六自由度彈道模型的參數(shù)進行最優(yōu)估計,并采用TIC不等式系數(shù)法,利用彈道重構(gòu)得到的數(shù)據(jù)對彈道仿真模型進行定量分析和驗證,以為仿真模型的可靠性提供依據(jù)。
1 彈道重構(gòu)的實現(xiàn)
1.1 彈道重構(gòu)狀態(tài)模型
彈道重構(gòu)的任務(wù)就是彈道參數(shù)估計,它是基于測量數(shù)據(jù)的彈體飛行狀態(tài)參數(shù)估計。因GPS定位存在誤差,為提高定位精度,必須對動態(tài)定位數(shù)據(jù)進行濾波處理,以估計出彈在飛行時的動態(tài)參數(shù),進而有效地重構(gòu)彈道。
GPS彈載接收機用于對飛行的彈箭進行探測,通過對實測到的彈道參數(shù)進行數(shù)據(jù)處理來計算出彈的實時位置、速度和姿態(tài)信息。根據(jù)上述彈道執(zhí)行過程,在基于GPS測量數(shù)據(jù)的濾波過程中,需要用到彈道模型,整個狀態(tài)方程組在地面坐標系下建立,描述無控火箭彈的空間運動方程組為:
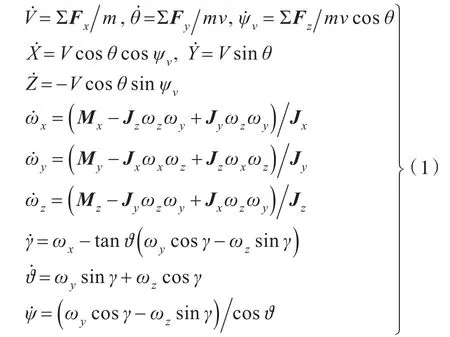
式中各符號的意義見參考文獻[6]。非線性方程(1)只是對彈箭運動狀態(tài)的近似描述,存在一定的誤差,為了補償這個誤差,引入了一個隨機噪聲矢量作為狀態(tài)擾動量,于是,系統(tǒng)的狀態(tài)方程模型可簡化為:

式中,w(t)為系統(tǒng)的過程白噪聲矢量;X(t)為行為向量,

1.2 彈道重構(gòu)量測模型
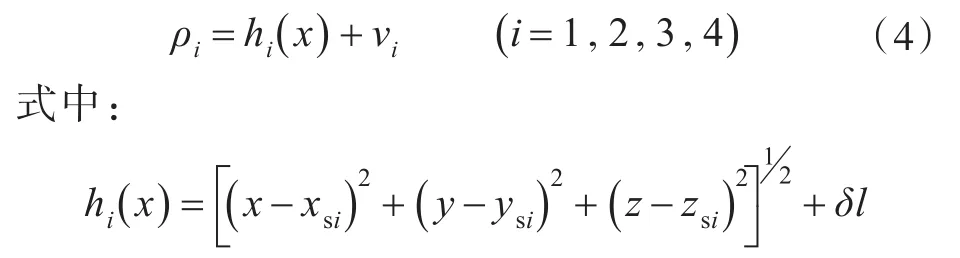
GPS接收機測量的是彈星之間的偽距:
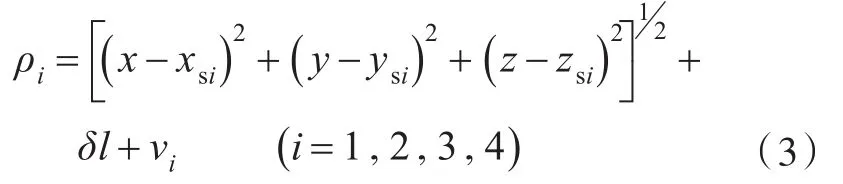
式中,vi為量測噪聲;(x,y,z) 和 (xsi,ysi,zsi) 分別為彈和衛(wèi)星在天球坐標系中的位置坐標;δl為由衛(wèi)星鐘差引起的距離誤差。上式可以寫為:
2 UKF濾波
系統(tǒng)模型(1)和量測模型(2)均為非線性,非線性濾波主要解決的問題是隨機量沿非線性系統(tǒng)的傳播。UKF算法是用一組確定性的采樣點來近似狀態(tài)分布,通過U變換得到變換采樣點來近似狀態(tài)的均值和方差,完成狀態(tài)沿非線性函數(shù)的傳播,對于Guass噪聲變換采樣點的分布,能夠以三階精度近似真實的均值和方差。
由于UKF使用的是離散時間非線性系統(tǒng),因此,需要對系統(tǒng)模型進行離散化處理。本文采用四階Runge-Kutta法以數(shù)值積分的形式實現(xiàn),處理后的系統(tǒng)模型和觀測模型為:

則UKF算法如下所示。
1)初始化
給定
2)采樣點及權(quán)值的計算
在初始化的基礎(chǔ)上,按照如下規(guī)則選取采樣點及其權(quán)值。
將上述采樣點分別通過非線性系統(tǒng)。其狀態(tài)預(yù)測值為:
上述整個算法流程及算法過程如圖1所示。

圖1 算法流程Fig.1 Flowchart of the algorithm
3 模型驗證
模型驗證就是比較仿真系統(tǒng)輸出與實際系統(tǒng)輸出的一致性,它分為靜態(tài)性能驗證和動態(tài)性能驗證。對于彈箭這類復(fù)雜系統(tǒng),人們往往關(guān)心的是其動態(tài)過程的性能參數(shù),動態(tài)性能驗證的實質(zhì)是兩個平穩(wěn)時間序列譜密度的相容性檢驗。仿真模型最好能給出這些動態(tài)參數(shù)的定量驗證指標,因此,本文將采用TIC不等式系數(shù)法對六自由度彈道模型進行驗證。
TIC不等式系數(shù)法是在相同輸入條件下,根據(jù)仿真數(shù)據(jù)和實際數(shù)據(jù)構(gòu)造一個標量函數(shù),以此作為衡量兩類輸出一致性和動態(tài)關(guān)聯(lián)性的定性指標。這種方法對數(shù)據(jù)序列的要求比較寬松,不要求獨立性和正態(tài)性,而且原理簡單、計算量小,是驗證模型輸出與實際輸出動態(tài)關(guān)聯(lián)性的有效方法。
設(shè)αi和 βi分別為實際和仿真輸出序列,數(shù)據(jù)長度為M,則TIC不等式系數(shù)為:

ζ越小,表明αi與 βi的一致性越好。將仿真數(shù)據(jù)序列與實際序列帶入上式,便可求得ζ。
4 仿真與分析
已知火箭彈發(fā)射點的氣象條件及衛(wèi)星概略星歷:發(fā)射點的緯度為45.004°,經(jīng)度為120.01°。根據(jù)六自由度的彈體運動方程組,解算得到彈體的運動軌跡,將彈體飛行軌跡加載到GPS衛(wèi)星模擬器內(nèi),衛(wèi)星模擬器即可模擬產(chǎn)生該飛行軌跡上彈載GPS接收機接收到的衛(wèi)星信號,并將該信號發(fā)射出來。彈載接收機則通過天線接收該信號并實現(xiàn)定位功能。
按上述方案進行數(shù)值仿真計算,采用6D彈道模型計算生成彈道數(shù)據(jù)。彈在飛行中會受到各種因素的干擾,如彈體初始擾動和發(fā)動機推力偏心。將各種干擾加入彈道進行仿真。火箭彈的射程為80km,飛行時間180s,濾波周期為0.5s。
仿真初始條件:x0=y0=z0=0 m,V0=80m/s,ωx=360 r/min,ωy=ωz=0 r/min ,ψv=ψ=γ=0°,?=58°,位置誤差均為15m,速度誤差均為2 m/s,姿態(tài)誤差均為2°。
根據(jù)彈載GPS飛行觀測數(shù)據(jù)進行彈道重構(gòu)。為了清晰地反映狀態(tài)估計值與真實值之間的差異,采用誤差曲線來反映算法的優(yōu)劣。圖2~圖10給出了彈的位置、速度及姿態(tài)的誤差重構(gòu)結(jié)果。
由圖2~圖7可知,x方向上的位置和速度誤差精度分別可達6 m和0.4 m/s,濾波穩(wěn)定時間分別為45 s和35 s;y方向上的位置和速度誤差精度分別可達10 m和1.0 m/s,濾波穩(wěn)定時間分別為40 s和35 s;z方向上的位置和速度誤差精度分別可達5 m和0.3 m/s,濾波穩(wěn)定時間分別為28 s和30 s。彈道的位置估計誤差和速度估計誤差分別降低到了單純的GPS觀測誤差的1/3和1/4左右,而且濾波發(fā)散問題和實際工程應(yīng)用中的精度問題也得到了有效解決。
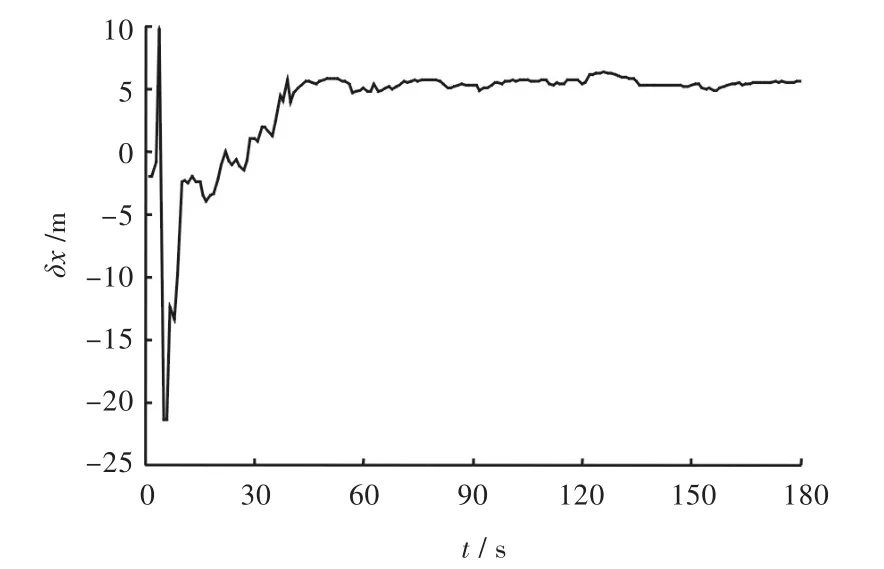
圖2 x方向上的位置誤差曲線Fig.2 Position error curve in the x-direction of coordinates

圖3 x方向上的速度誤差曲線Fig.3 Velocity error curve in the x-direction of coordinates

圖4 y方向上的位置誤差曲線Fig.4 Position error curve in the y-direction of coordinates

圖5 y方向上的速度誤差曲線Fig.5 Velocity error curve in the y-direction of coordinates

圖6 z方向上的位置誤差曲線Fig.6 Position error curve in the z-direction of coordinates
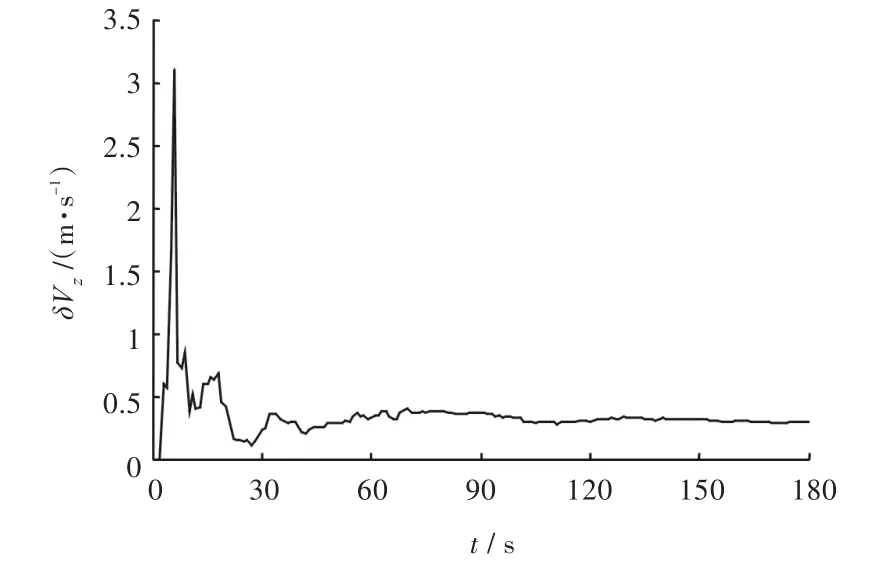
圖7 z方向上的速度誤差曲線Fig.7 Velocity error curve in the z-direction of coordinates
由圖8~圖10可知,彈的姿態(tài)角誤差沒有很好的收斂效果,系統(tǒng)狀態(tài)變量誤差的大小和斂散性由外部的觀測信息決定。對于可觀測的狀態(tài)變量,經(jīng)過卡爾曼濾波器后,其狀態(tài)變量的誤差會收斂,從而能將這些狀態(tài)變量估計出來,但對于不可觀測的狀態(tài)變量,卡爾曼濾波器則無法觀測。因此,還有待于進一步開展對GPS姿態(tài)測量系統(tǒng)的研究,從而有效提高彈的飛行姿態(tài)估計能力,提高火箭彈的射擊精度。
利用彈道重構(gòu)數(shù)據(jù)計算得到的賽氏系數(shù)如表1所示。結(jié)果表明,仿真模型的計算結(jié)果與實際飛行狀態(tài)的一致性較好,證明利用彈道重構(gòu)對彈箭六自由度仿真模型進行驗證是有效的。
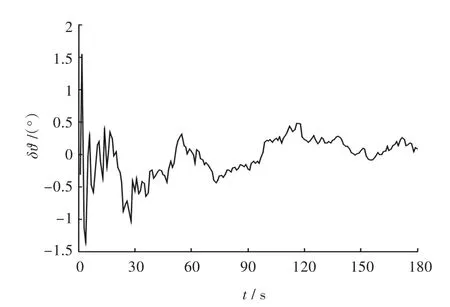
圖8 俯仰角?誤差曲線Fig.8 Error curve of pitch angle?

圖9 偏航角ψ誤差曲線Fig.9 Error curve of yaw angleψ
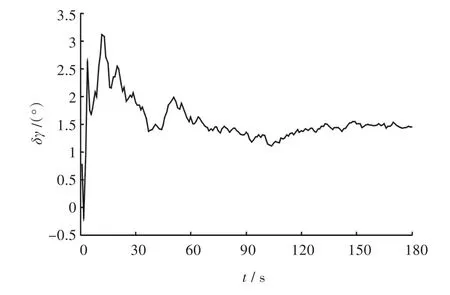
圖10 滾轉(zhuǎn)角γ誤差曲線Fig.10 Error curve of roll angleγ
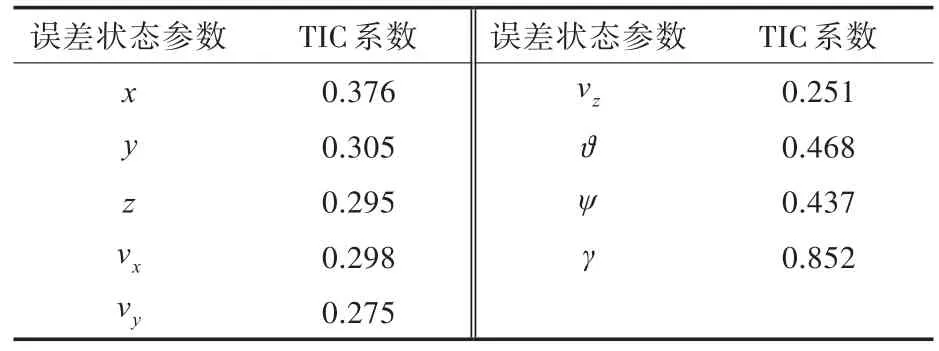
表1 TIC不等式系數(shù)計算結(jié)果表Tab.1 TIC inequality coefficients calculation results
5 結(jié) 語
本文采用彈載GPS觀測數(shù)據(jù)對彈道重構(gòu)進行了建模、仿真及分析,重構(gòu)出了用于模型驗證的火箭彈飛行狀態(tài)誤差參數(shù),提出了以TIC不等式系數(shù)法作為火箭彈仿真模型驗證的定量方法。計算結(jié)果表明,利用彈道重構(gòu)對艦載火箭彈六自由度彈道仿真模型進行驗證是有效的。該算法對艦載火箭彈的導(dǎo)航性能具有較大的現(xiàn)實意義,為在艦載火箭彈箭上的工程應(yīng)用提供了一定的參考。
[1]史金光,徐明友,王中原,等.卡爾曼濾波在彈道修正彈落點推算中的應(yīng)用[J].彈道學(xué)報,2008,20(3):41-43,48.SHI J G,XU M Y,WANG Z Y,et al.Application of Kalman filtering in calculation of trajectory falling point of trajectory correction projectiles[J].Journal of Ballistics,2008,20(3):41-43,48.
[2]唐吉祥,沈云山.卡爾曼濾波器在炮位偵察雷達中的應(yīng)用[J].電光與控制,2004,11(1):48-49,52.TANG J X,SHEN Y S.Application of Kalman filter in cannon locating radar[J].Electronics Optics and Control,2004,11(1):48-49,52.
[3]廖瑛,梁加紅,楊雪榕,等.導(dǎo)彈武器系統(tǒng)六自由度仿真模型驗證方法[J].上海航天,2007,24(6):34-38.LIAO Y,LIANG J H,YANG X R,et al.Research on validation methods of six-degree-of freedom simulation model of missile weapon systems[J].Aerospace Shanghai,2007,24(6):34-38.
[4]楊祖快,劉鼎臣.反艦導(dǎo)彈射擊精度的建模與模型驗證[J].戰(zhàn)術(shù)導(dǎo)彈技術(shù),2002(3):18-22.YANG Z K,LIU D C.Modelling and model validation for firing accuracy of antiship missile[J].Tactical Missile Technology,2002(3):18-22.
[5]王紅衛(wèi).建模與仿真[M].北京:科學(xué)出版社,2002.
[6]錢杏芳,林瑞雄,趙亞男.導(dǎo)彈飛行力學(xué)[M].北京:北京理工大學(xué)出版社,2008.
[7]李新國,曾穎超,劉金,等.彈道重構(gòu)在導(dǎo)彈仿真模型驗證中的應(yīng)用[J].飛行力學(xué),1998,16(4):82-86.LI X G,ZENG Y C,LIU J,et al.A trajectory reconstruction method of model validation on missile simulation[J].Flight Dynamics,1998,16(4):82-86.
[8]朱安福,景占榮,羊彥,等.UKF及其在目標跟蹤中的應(yīng)用[J].火力與指揮控制,2008,33(8):27-29.ZHU A F,JING Z R,YANG Y,et al.UKF and its application to target tracking[J].Fire Control and Command Control,2008,33(8):27-29.
[9]NORGAARD M,POULSEN N K,RAVN O.New developments in state estimation for nonlinear systems[J].Automatica,2000,36(11):1627-1638.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
北京航空航天大學(xué)學(xué)報(2017年9期)2017-12-18 07:12:25
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
電源技術(shù)(2016年9期)2016-02-27 09:05:39
