監(jiān)控視頻中目標(biāo)車輛速度被動式測量方法研究
2012-11-14 10:52:16靳慧云謝賢能
測繪通報 2012年8期
靳慧云,李 苑,謝賢能,胡 斌
(1.浙江警察學(xué)院,浙江杭州310053;2.浙江省公安廳,浙江杭州310009; 3.浙江省衢州市公安局,浙江衢州324002)
監(jiān)控視頻中目標(biāo)車輛速度被動式測量方法研究
靳慧云1,李 苑1,謝賢能2,胡 斌3
(1.浙江警察學(xué)院,浙江杭州310053;2.浙江省公安廳,浙江杭州310009; 3.浙江省衢州市公安局,浙江衢州324002)
對事先沒有安置測速裝置,事后僅通過監(jiān)控視頻進(jìn)行處理的目標(biāo)車輛速度被動式測量的方法進(jìn)行相關(guān)研究。闡述被動式目標(biāo)車輛速度測量的概念、基本原理;視頻畫面中點、線、面之間的關(guān)系;被動式目標(biāo)車輛速度測量時方向與標(biāo)定點的選擇;不同監(jiān)控點之間目標(biāo)車輛的平均速度測量和同一監(jiān)控點中目標(biāo)車輛速度測量的方法等。
視頻畫面;被動式;目標(biāo)車輛速度測量
一、引 言
目前,在道路交通安全管理中,利用專用的測速裝置(如地感線圈測速、雷達(dá)測速、紅外測速和激光測速法等)或借助軟件實現(xiàn)的視頻監(jiān)控測速系統(tǒng)(如虛擬線圈法、幀間差分法、背景減差檢測法、光流檢測法等),已經(jīng)能夠完成對確定區(qū)域的目標(biāo)車輛的速度檢測。但是,在事先沒有專門安置這些的裝置的區(qū)域,事后僅僅通過提取的監(jiān)控視頻完成測量,尚屬一個新的研究課題。相對于前者,把后者——事后通過監(jiān)控視頻對目標(biāo)車輛速度進(jìn)行的測量,稱為被動式測量。雖然,由于受視頻畫面質(zhì)量、被測現(xiàn)場周邊條件等多種因素的影響,這種被動測量尚達(dá)不到主動測量的精準(zhǔn)程度,但是,在交通管理、案件偵查、事件處理中,需要進(jìn)行被動測量的情況很多,是一個急需解決的技術(shù)問題。為此,筆者的項目組近幾年對其進(jìn)行了跟蹤研究,在大量案例和實踐基礎(chǔ)上,提出目前通過監(jiān)控視頻對目標(biāo)車輛進(jìn)行被動式測量的一些常用方法。
二、監(jiān)控視頻中被動式目標(biāo)車輛速度測量
1.視頻測量相關(guān)名詞
1)被測目標(biāo)(measured target),是指在視頻圖像中需要測量的人或物。
2)被測視頻(measured video),是指包含目標(biāo)、需要對其進(jìn)行測量的視頻。
3)標(biāo)定視頻(calibration video),是指包含有測量參照物或測量標(biāo)識,根據(jù)被測視頻畫面重建的、用于實施測量標(biāo)定的視頻。
4)被測視頻畫面(measured video image),是指包含目標(biāo),并需要對其進(jìn)行測量的視頻畫面。
5)標(biāo)定視頻畫面(calibration video image),是指包含有測量參照物或測量標(biāo)識,根據(jù)被測視頻畫面重建的、用于實施測量標(biāo)定的視頻畫面。
2.關(guān)于監(jiān)控視頻中被動式目標(biāo)車輛速度測量
從測量的方式上講,監(jiān)控視頻中被動式目標(biāo)車輛速度測量,是以案(事)件發(fā)生后的監(jiān)控視頻為主要對象,通過信息提取、現(xiàn)場測量、圖像處理等手段,以獲取案(事)件線索或證據(jù)為目的,對目標(biāo)車輛速度進(jìn)行測量的技術(shù)方法。目前,這種方法主要分為兩類:一類是不同監(jiān)控點之間目標(biāo)車輛的平均速度測量;另一類是同一監(jiān)控點的目標(biāo)車輛速度測量。
三、監(jiān)控視頻中被動式目標(biāo)車輛速度測量的基本原理
若設(shè)速度為v,距離為Δl,時間為Δt,則無論是主動還是被動的車速測量,都是依據(jù)公式v=Δl/Δt計算完成的。從測量實踐看,其關(guān)鍵是參數(shù)Δl的測定。因為參數(shù)Δt通常是可以通過視頻畫面的時間顯示或從被測視頻中查算幀數(shù)(幀差)直接得到的,即通常視頻播放是25幀/s,一幀時間t1=1/25= 0.04 s。所以,在被動式車速測量的研究中,各種方法的差異,也就主要體現(xiàn)在距離參數(shù)Δl獲取的方法不同上了。從技術(shù)路線上講,目標(biāo)車速測量是動態(tài)測量,是通過“被測視頻”完成的,而目標(biāo)尺寸測量是靜態(tài)測量,是通過“被測視頻畫面”完成的,這是兩者的最大差異之處。在一般案(事)件中,目標(biāo)車輛的行駛狀態(tài),通常分兩種情況:第1種,駕駛?cè)宋床扇?yīng)急措施的駕駛狀態(tài);第2種,駕駛?cè)艘呀?jīng)采取應(yīng)措施的駕駛狀態(tài)。
根據(jù)需要,正確區(qū)分應(yīng)急措施采取之前與采取之后兩個距離段,并展開目標(biāo)車速的分別測量,對于案件性質(zhì)判斷和事故責(zé)任劃分至關(guān)重要。一般情況下,對應(yīng)急措施采取的前后分界點劃分可通過現(xiàn)場勘查和視頻監(jiān)控畫面的回放,查看駕駛員是否有減速、打方向等應(yīng)急動作。至于測量的數(shù)據(jù)是平均速度還是即時速度,應(yīng)視不同情況確定,一般而言,所測兩點間的視頻幀差越小,目標(biāo)運動的距離越短,越接近即時速度(測量誤差亦可能越大),反之亦然。被動式目標(biāo)車速測量,應(yīng)具備以下3個基本條件:
1)在被測視頻中,目標(biāo)車輛應(yīng)有一定長度的行駛軌跡。
2)通過被測視頻反映出的案(事)件,應(yīng)可以找到原發(fā)現(xiàn)場,而且,原發(fā)現(xiàn)場應(yīng)有尚未發(fā)生變化的參照物或標(biāo)志線,可以提供較準(zhǔn)確的畫面測量與實地測量。
3)被測視頻播放應(yīng)正常,均勻流暢、幀速固定,并無丟幀現(xiàn)象。
四、視頻畫面中目標(biāo)車輛速度測量的點、線、面關(guān)系
視頻畫面中目標(biāo)車輛速度測量,是解決在一個平面上移動目標(biāo)的測量問題,其測量值是一個矢量,故不僅涉及移動目標(biāo)移動的長度,還涉及目標(biāo)移動的方向。視頻監(jiān)控頭攝取的畫面,是一個用二維畫面表達(dá)三維空間的透視圖,因此,對三維空間的點、線、面的關(guān)系認(rèn)識是測量所必需的。如圖1所示,設(shè)點M1(x1,y1,z1)向點M2(x2,y2,z2)方向移動。
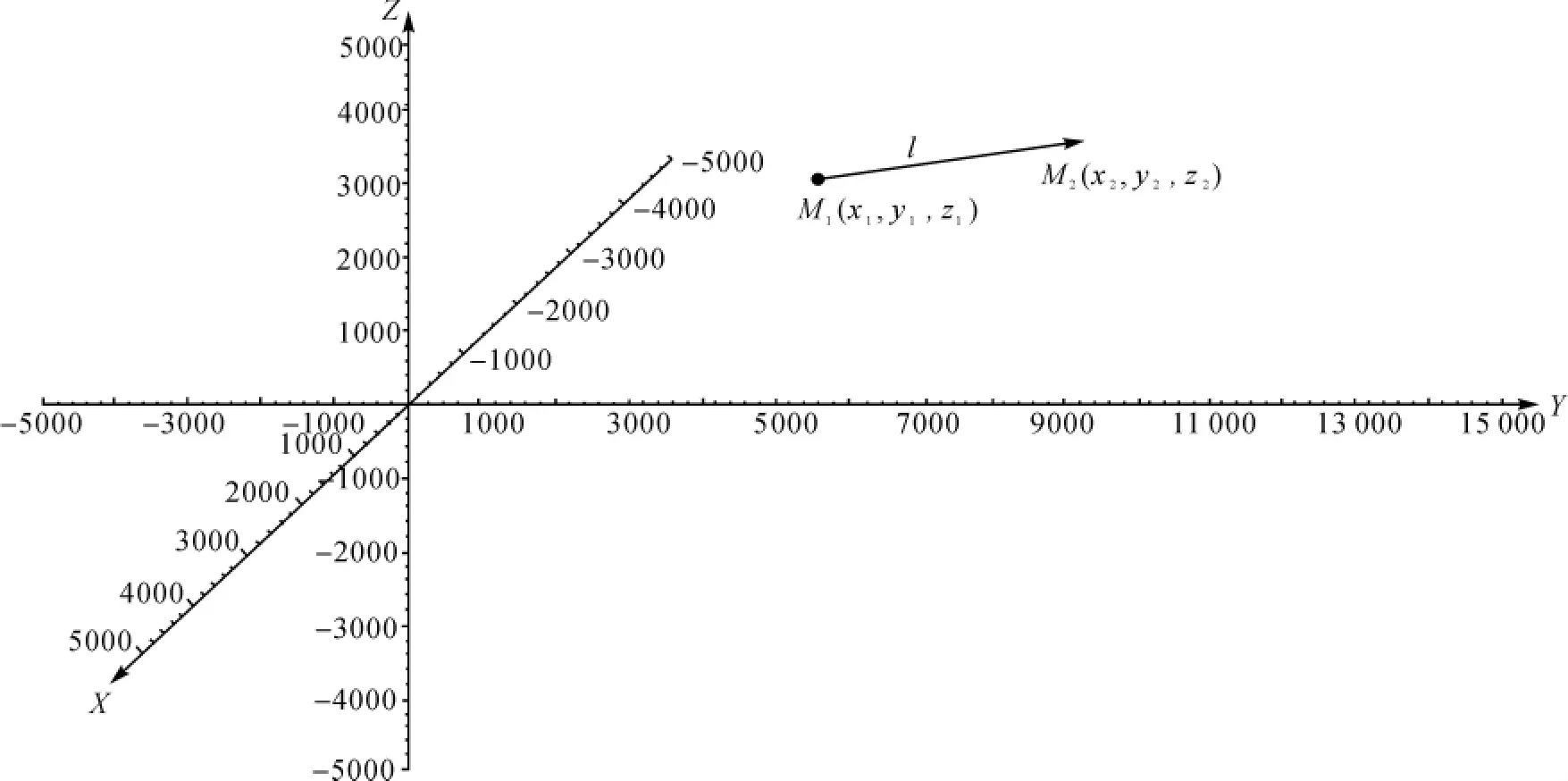
圖1 點線面關(guān)系示意圖
當(dāng)z2=z1時,有向線段l位于平行于xy平面的平面內(nèi),此時有線段長度

由此可知,三維空間中的一條線段,轉(zhuǎn)換為二維透視圖像后,從不同的角度觀察,可能會是不同長度的線段,甚至還可能會成為一個點。
五、監(jiān)控視頻中被動式目標(biāo)車輛速度測量的方向與標(biāo)定點的選擇
1.測量標(biāo)定點選擇
根據(jù)上述空間點、線、面的關(guān)系,在目標(biāo)車速測量中,最好選擇車輪胎與地面的切點作為測量標(biāo)定點。因為,無論攝像機(jī)位置如何,只要選擇地面作為參照平面,那么,兩個測量標(biāo)定點確定的直線就一定在地平面(路面)上。在路面基本平整的情況下,選定的測量標(biāo)定點的位移距離就是車輛的位移距離。當(dāng)然,實際的測量中,未必都能夠看到車輪胎與地面的接觸點,如果遇到這種情形,可以找出車輛上清晰、穩(wěn)定的其他特征點作為測量標(biāo)定點(如反光鏡、車燈、門拉手等)。
2.測量方向的選擇
在目標(biāo)車速測量中,應(yīng)選擇攝像機(jī)鏡頭光軸與目標(biāo)運動方向夾角較大的畫面作為被測視頻。因為攝像機(jī)在正前方或者正后方(正對目標(biāo))拍攝,目標(biāo)車輛行駛的軌跡長度在畫面中變化不明顯,若Δl值太小,容易產(chǎn)生較大的測量誤差。此外,測量行駛軌跡長度時,還應(yīng)盡量選擇車輛直行路段為宜。
六、參數(shù)計算方法
1.不同監(jiān)控點之間目標(biāo)車輛的平均速度測量
測量目標(biāo)車輛在兩個監(jiān)控點之間行使的平均速度,方法比較簡單。可以取距離現(xiàn)場最近的兩個監(jiān)控點拍攝的、較為清晰的畫面作為起始畫面,找出明顯的參照物或標(biāo)志線,并依此作為起點和終點的計時點,沿目標(biāo)車輛行駛的軌跡實地測量兩點間的距離參數(shù)Δl,同時可根據(jù)視頻畫面顯示或在起止區(qū)域內(nèi)行駛的幀數(shù),求得參數(shù)Δt,即可計算得出車輛在該路段內(nèi)相應(yīng)的平均速度。但要注意兩點。
1)兩個監(jiān)控點之間的距離不宜太長,且交通通暢、狀況良好,否則測出的平均速度意義不大。
2)兩個視頻監(jiān)控點最好在同一監(jiān)控系統(tǒng)中,以便進(jìn)行時間計算或校正。
2.同一監(jiān)控點視頻中目標(biāo)車輛速度的測量
利用在同一個監(jiān)控點拍攝的被測視頻進(jìn)行的車速測量,實際工作中較為常見,目前,有以下幾種方法。
(1)根據(jù)現(xiàn)場參照物獲取參數(shù)Δl的方法
基于被測視頻所反映的原發(fā)現(xiàn)場中尚存在未發(fā)生變化的參照物或標(biāo)志線,確定起止測量點,然后,通過現(xiàn)場實地測量起止點的實際距離,獲取參數(shù)Δl值,從而完成測量的方法。
如圖2某地發(fā)生一起交通事故,事故發(fā)生在監(jiān)控畫面之外約3 m處,車輛行駛在視頻畫面中的路段基本處于未采取應(yīng)急措施狀態(tài)。
從起點開始,統(tǒng)計幀幅至終止點為50幀,實地丈量起止點間距離為28.7 m。
根據(jù)公式計算得

(2)根據(jù)目標(biāo)車輛的車身特征點獲取參數(shù)Δl的方法
這種方法是在目標(biāo)車輛車身上確定兩個特征點作為標(biāo)定點。測量時,觀測目標(biāo)車輛車身上這兩個標(biāo)定點通過選定的定位點的畫面幀數(shù),獲取參數(shù)Δt;然后根據(jù)目標(biāo)車輛車身上選擇的兩個特征點確定Δl,從而完成測量的方法。具體操作可通過兩種方式進(jìn)行:
1)車長測量法。它是基于對各種車輛長度已知或可查知的前提下進(jìn)行的。以車前端和車后端某兩點作為標(biāo)定點(車長),在被測視頻屏幕上做點并作為定位點,逐幀播放視頻,觀測目標(biāo)車輛車身標(biāo)定點通過定位點的畫面幀數(shù),獲取參數(shù)Δt;然后,根據(jù)車型確定車長數(shù)據(jù)Δl,從而完成測量的方法。利用這種方法測量車速,其畫面幀數(shù)首要前提是先要確定目標(biāo)車輛的類型。須反復(fù)查看被測視頻,利用目標(biāo)車輛的外觀、車身、牌照等特征標(biāo)記,通過車輛數(shù)據(jù)庫或上網(wǎng)搜索相關(guān)類型車輛,獲取車長數(shù)據(jù)。
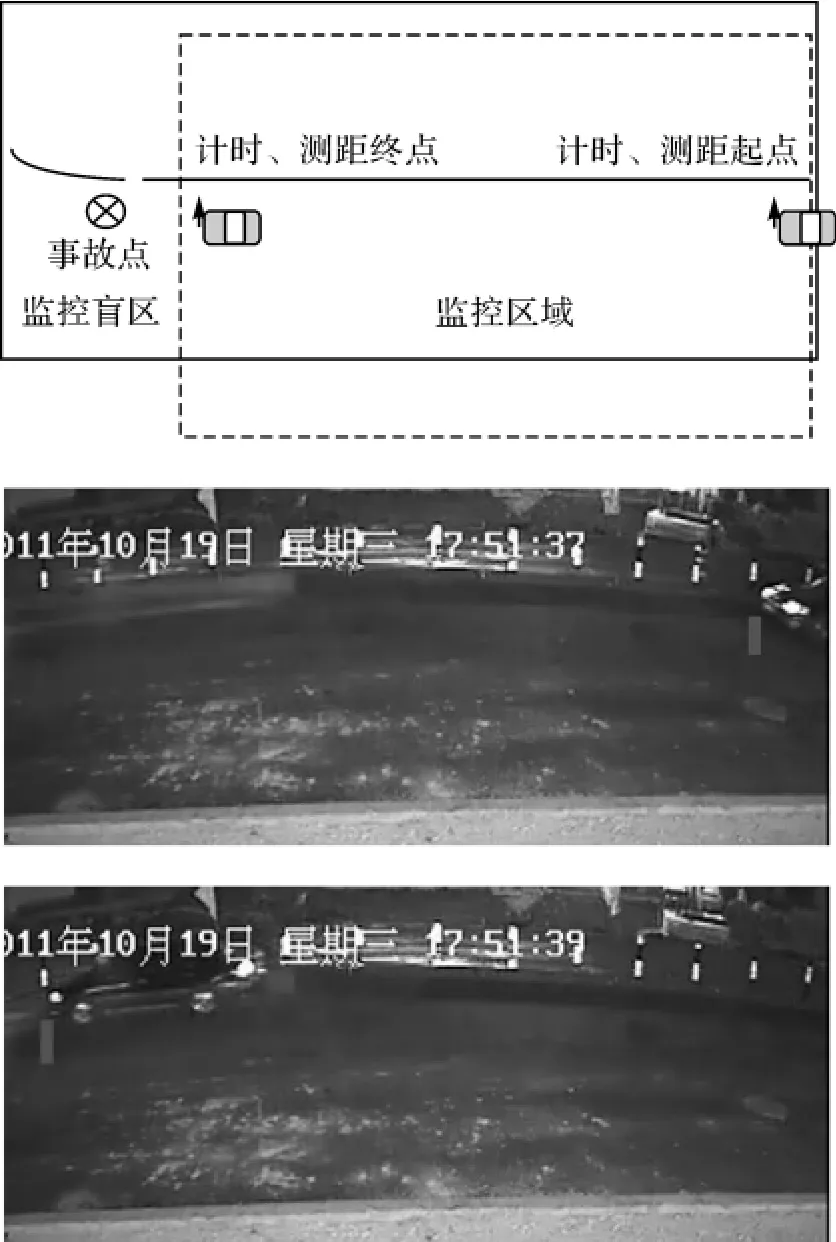
圖2 事故現(xiàn)場示意圖
2)在目標(biāo)車輛車身上任意選擇兩個特征點作為標(biāo)定點,在被測視頻中目標(biāo)車輛附近的現(xiàn)場上選擇一個點作為定位點,觀測目標(biāo)車輛車身上這兩個標(biāo)定點通過選定的定位點的畫面幀數(shù),獲取參數(shù)Δt;然后測量目標(biāo)車輛車身上選擇的兩個特征點的距離以確定Δl,從而完成測量的方法[1]。
以上兩種方式的最大優(yōu)點是不需要到現(xiàn)場測量參照物求Δl,區(qū)別在于定位點的選擇方式不同。但要注意,由于Δl值不大,畫面顯示不長,當(dāng)目標(biāo)車輛通過兩點的幀數(shù)太少時,即高速行駛的情況下,誤差可能較大。
(3)利用畫面匹配獲取參數(shù)Δl的方法
這種方法是基于畫面匹配的原理實現(xiàn)測量的[2]。即在被測視頻中觀察目標(biāo)車輛行駛的軌跡,取一定時間段的畫面進(jìn)行匹配,標(biāo)出測量點或線,根據(jù)被測視頻標(biāo)出的點或線,建立標(biāo)定視頻;然后,進(jìn)入現(xiàn)場測量標(biāo)定點之間的實際距離以獲取參數(shù)Δl;最后查算相應(yīng)的畫面幀數(shù),求得參數(shù)Δt,從而完成測量的方法[3]。
如圖3所示,畫面由7幀疊加而成,Δt=6× 0.04=0.24 s,現(xiàn)場實際測量值為4.67 m。v= (4.67 m÷0.24 s)×3600 s=70.05 km/h。
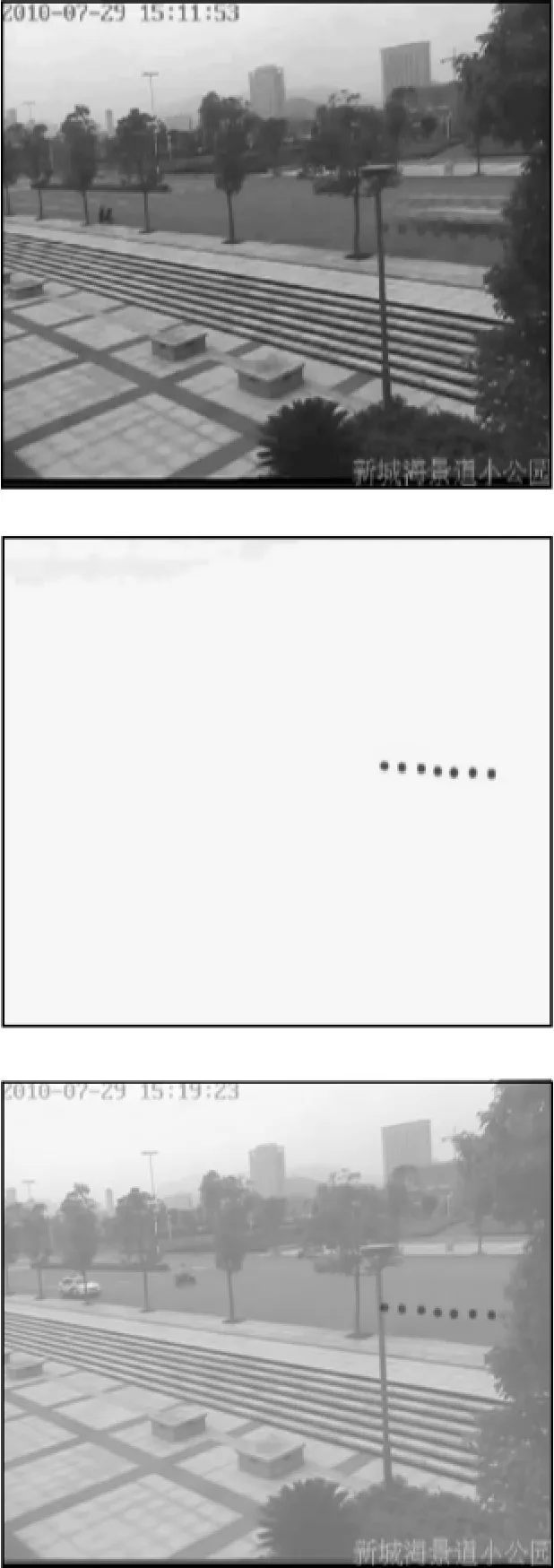
圖3
(4)利用相關(guān)軟件獲取參數(shù)Δl的方法
這種方法是在有條件的情況下,利用現(xiàn)有的專業(yè)測量(或有測量功能的)軟件,測量參數(shù)Δl;然后,根據(jù)被測視頻中標(biāo)記點幀差求得參數(shù)Δt,從而完成測量的方法。實際上,這種方法目前還是一種間接的測量,是借助現(xiàn)有軟件中尺寸測量功能完成的。具體操作與軟件法測量目標(biāo)尺寸相似[4]。
七、結(jié)束語
綜上所述,監(jiān)控視頻中被動式目標(biāo)車輛速度測量方法,是目前實際工作中,專門針對那些沒有安裝測速裝置和系統(tǒng)的路段,僅通過被測視頻采取的目標(biāo)車輛速度測量的方法,是對主動式車速測量的必要補(bǔ)充。當(dāng)然,任何時候,一種方法,都不可能解決所有問題,一個問題也不都是僅由一種方法才能解決。相信隨著視頻偵查技術(shù)的廣泛應(yīng)用,會有更多、更好的實用方法服務(wù)于實踐。
[1] 馮浩,潘少猷,陳建國.基于視頻的車速鑒定方法[J].中國司法鑒定,2009(5):46-47.
[2] 李苑,謝賢能.視頻畫面測量中的畫面匹配測量技術(shù)研究[J].中國刑警學(xué)院學(xué)報,2010(3):32-33.
[3] 陳波杰.利用視頻資料測量車速的研究[J].中國刑事警察學(xué)院學(xué)報,2011(1):40-42.
[4] 謝賢能,李苑.嫌疑人身高測判方法研究[J].刑事技術(shù),2009(6):29-30.
[5] 苗蕾.移動對象時空數(shù)據(jù)建模的研究[J].測繪通報,2008(7):47-49,57.
[6] 任述明,向懷坤,劉建偉,等.基于視頻圖像的車速檢測研究[J].交通與計算機(jī),2007(1):90-93.
[7] 童劍軍,鄒明福.基于監(jiān)控視頻圖像的車輛測速[J].中國圖象圖形學(xué)報,2005(2):192-196.
[8] 王駿飛,羅大庸.一種新的基于視頻技術(shù)的車速檢測方案[J].自動化技術(shù)與應(yīng)用,2010(3):63-66.
[9] 王文合,李國璋,石志勇,等.視頻測速的算法改進(jìn)及測速誤差分析[J].自動測量與控制,2007(1):58-60.
[10] 關(guān)曉惠,周志敏.一種復(fù)雜背景下的運動目標(biāo)檢測方法[J].浙江水利水電專科學(xué)校學(xué)報,2010(1):38-40.
Research on Passive Measurement Method of Monitoring Target Vehicle Speed in Video
JIN Huiyun,LI Yuan,XIE Xianneng,HU Bin
0494-0911(2012)08-0047-04
P211
B
2012-05-21
公安部科技創(chuàng)新項目(2011YYCXZJSTO45)
靳慧云(1958—),女,遼寧沈陽人,教授,主要研究方向為公安計算機(jī)應(yīng)用。
猜你喜歡
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
Coco薇(2016年2期)2016-03-22 02:42:52
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
