
8m×6m風洞特大迎角機構連續掃描試驗技術研究與應用
2012-11-15 07:02:56唐喬喬張衛國劉忠華
實驗流體力學 2012年2期
關鍵詞:模型
唐喬喬,張衛國,劉忠華,陳 洪
(中國空氣動力研究與發展中心,四川 綿陽 621000)
0 引 言
風洞試驗中,常規測力試驗方法通常分為兩種:步進式和連續式。步進式是在模型姿態角系統(迎角或側滑角)逐點運行、停頓這一循環過程中進行測量的方法;連續式是模型姿態角系統(迎角或側滑角)連續運行,在運行過程中進行同步測量的方法,通常稱之為連續掃描試驗技術。步進式測量過程中模型與來流之間的角度是恒定的,具有充足的時間建立流場,是風洞測力試驗中獲取數據的基本方法;而在連續式測量過程中模型與來流之間的角度不斷變化,角速率運動過快時,類似大振幅振蕩試驗,模型運動會引起氣動遲滯現象。但是,當模型角速率運行較低時,且模型區域內不存在噴流等高速、復雜流場時,對應迎角下能夠建立相對穩定的流場,模型運動對流場的影響可以忽略,即不會出現氣動遲滯現象,氣動數據能夠達到步進試驗的同等效果,這也是連續掃描試驗技術可以實現的基礎。
與步進式相比,連續掃描試驗技術可有效提高試驗效率,獲取密集的氣動力數據,在國外先進的生產型風洞,如德-荷蘭風洞(DNW-LLF),已經廣泛采用連續掃描試驗技術進行試驗。為提升8m×6m風洞的試驗能力,開展了連續掃描試驗技術研究,并在風洞中成功應用了該項技術。
1 試驗設備
1.1 風洞設施
8m×6m風洞總長237m,風洞具有串列的兩個試驗段。第一試驗段高16m、寬12m、長25m,常用風速5~20m/s;第二試驗段高6m、寬8m、長15m,常用風速20~85m/s。
1.2 特大迎角機構
8m×6m風洞特大迎角機構是該風洞配套的多用途支撐系統,其主要性能指標如下:迎角變化范圍-10°~120°,側滑角變化范圍-30°~30°,精度0.05°[1]。
1.3 試驗模型
使用兩種不同布局形式的試驗模型進行試驗:
(a)YF-16戰斗機全金屬模型,縮比1∶9,展長0.9815m,弦長0.3704m,參考面積0.3210m2。模型機頭、機翼前緣、垂尾前緣等多處粘貼鋸齒形固定轉捩帶。圖1為試驗模型在風洞中進行風洞試驗的照片。
(b)某型運輸機全金屬模型,縮比1:8.84,展長5.597m。

圖1 YF-16試驗模型照片Fig.1 The test model photograph
1.4 天平及測控系統
試驗使用桿式六分量天平。風洞測控系統為一體化網絡測控系統,包括試驗運行管理、速壓控制、模型姿態角控制、數據采集、數據處理、數據分析等,見圖2[2]。
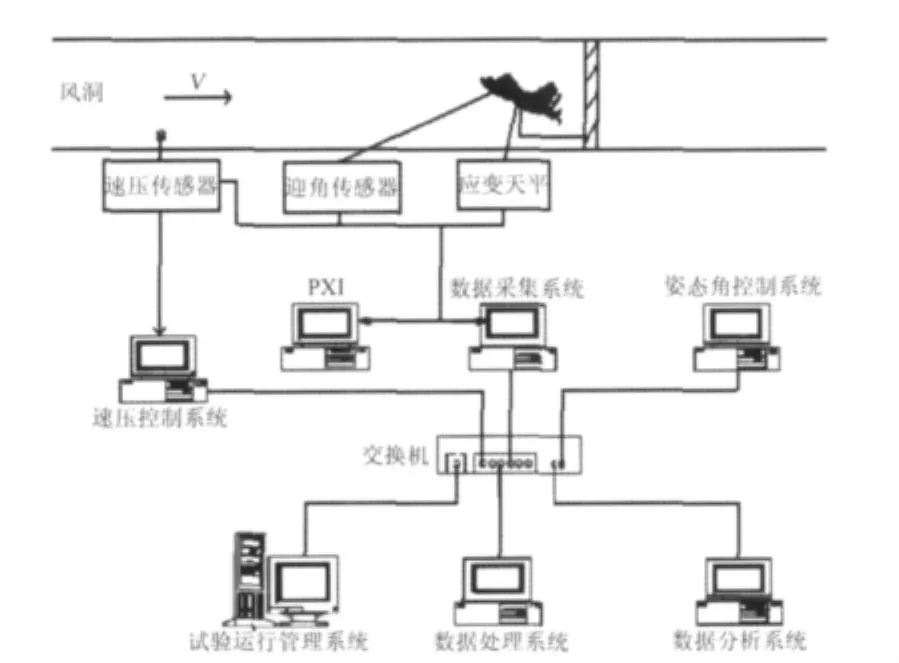
圖2 測控系統組成Fig.2 The structure of measurement and control system
2 關鍵技術及實現
2.1 速壓精確控制及采集
模型的連續運行對速壓的穩定性和跟隨性要求較高,因此對速壓控制系統進行了改進,提高了穩轉速和穩速壓控制精度,使電機穩定時間更短(小于50s),轉速波動量更小(從0.7轉下降到了0.2轉),穩轉速控制精度高于1‰,穩速壓控制精度接近3‰。
為了準確反映風洞試驗段模型區域的真實速壓,對速壓反饋點的位置選取進行了系統研究,鋪設了兩路實時速壓反饋信號,測試不同位置實時速壓的相關性和連續變迎角過程中速壓的變化情況。
2.2 模型姿態角精確控制及采集
模型姿態的平穩變化可以減小模型對流場的擾動,這是連續掃描試驗技術實現的必要前提。為保證模型連續變化迎角時運動的勻速性,對特大迎角控制程序PID參數進行了調整,調試出了滿足定位精度和平穩速度要求的系統控制參數。
精確的姿態角測量是獲取準確氣動數據,實現連續掃描試驗技術的重要環節。實時迎角傳感器使用方便,具有較高的測試精準度,是當前測試實時迎角的主要儀器。
2.3 天平信號采集及處理
采用PXI-6281數據采集系統進行天平、速壓、角度信號采集,相鄰通道采集時間間隔0.2ms,采集頻率100Hz。
連續掃描和常規步進方式數據處理主要區別在于對天平信號的處理。步進方式測力試驗時,天平信號集中在低頻部分,而噪聲分布在高頻部分,針對這一特點,采用低通濾波器進行濾波,然后對5s數據平均進一步消除干擾。而連續掃描是在模型運動過程中進行采集的,不能通過平均的方式消除干擾,故采用小波消噪進行處理,保留有用信號中的尖峰和突變部分。圖3為原始信號小波消噪前后對比圖。

圖3 小波消噪前后對比Fig.3 Signal contrast between wavelet disposal
連續掃描試驗時,先對初讀數和吹風原始數據中的每個通道數據進行小波消噪處理,然后按照指定的角度序列進行插值,分別生成與常規測力方式相同格式的初讀數和吹風數文件,見圖4。再按標準的數據處理流程進行處理。
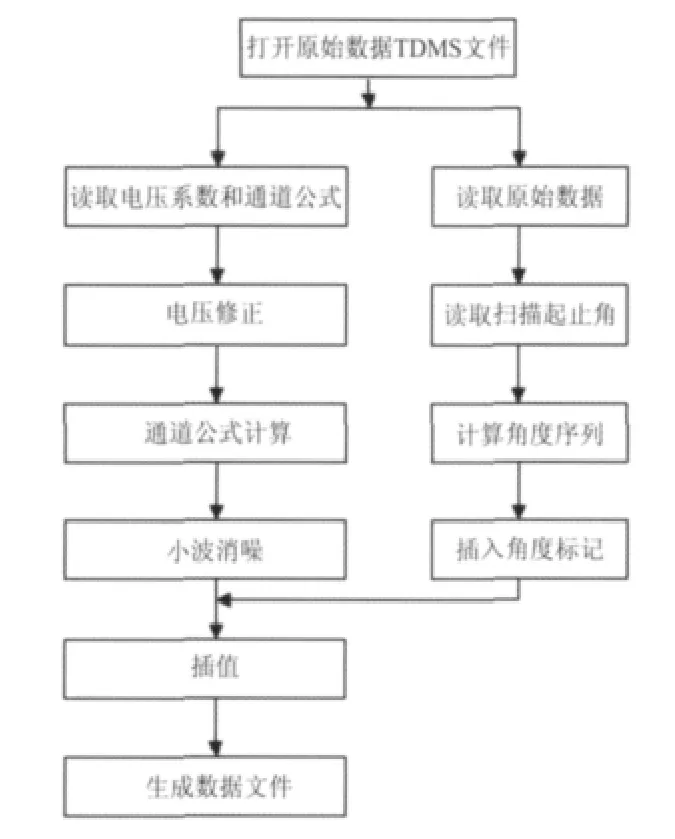
圖4 數據處理流程示意圖Fig.4 Schematic diagram of the data processing
3 試驗控制流程優化
連續掃描測力試驗不同于常規步進測力,需對原有的試驗運行管理系統進行補充和完善,其試驗流程控制見圖5。根據試驗條件需求,輸入實時速壓、掃描起點、掃描終點、掃描頻率、角度序列差值間隔等,試驗運行管理系統將這些指令自動發送給各個子系統,并根據試驗條件自動識別角度范圍并控制角度機構運行,待模型運行角度進入試驗角度范圍后通知數據采集系統開始采集,采集結束后機構角度回零并停風[3]。
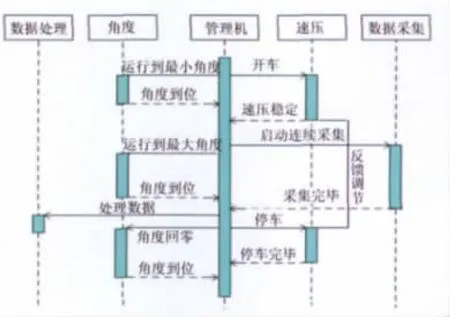
圖5 試驗流程控制示意圖Fig.5 Schematic diagram of the test control process
4 應用結果分析
4.1 不同角速率對試驗結果的影響
連續掃描試驗技術是通過同步測量來獲取模型進入勻速段時的氣動力,測量結果本身不存在附加的慣性力,但模型角速率運動會影響模型繞流的附著程度,因此連續掃描角運動速率要保證氣流附著與步進試驗一致。圖6是角速率分別為ω=0.2°/s,0.5°/s,1.0°/s的連續掃描試驗與步進試驗的結果比較。結果表明:不同角速率對應的曲線差異不大,但0.5°/s時的數據與步進數據更加吻合,原因可能是較低角速率時特大迎角機構控制平穩性不夠,而在大角速率下流場建立不充分造成。綜上所述,連續掃描試驗技術采用角速率為0.5°/s是合適的。
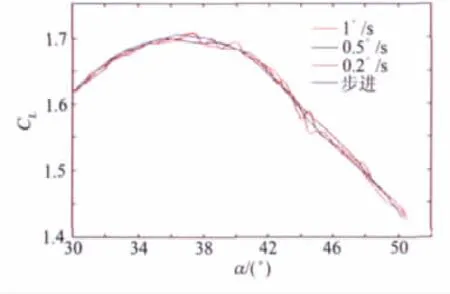
圖6 不同角速率對掃描結果的影響Fig.6 Comparison of different rates of angle of attack
4.2 試驗精度
試驗風速70m/s,角度范圍0°~10°,分別進行了步進和連續兩種試驗方式的7次重復性試驗,均方根計算精度結果見表1。結果表明:兩種測量方法的升力、阻力和俯仰力矩系數精度均達到或接近優秀指標,連續掃描試驗技術符合國軍標精度要求。

表1 測試精度表Table1 The precision of test
4.3 試驗準度
為檢驗連續掃描試驗技術的測試準度,在迎角0°~90°范圍內,分別使用步進與連續掃描兩種測試方式進行了YF-16模型試驗,其中連續掃描角速率0.5°/s。
圖7給出了升力、阻力及俯仰力矩系數曲線。比較可知:整個測試迎角范圍內,連續掃描測試曲線與步進結果曲線吻合,升力線斜率差別在0.5%之內,最大升力系數相差0.6%。而在迎角70°附近區域,連續掃描曲線數據點出現跳動。究其原因可能是在此大迎角范圍,戰斗機出現較為不穩定的前體不對稱渦,這種非定常的流場造成氣動數據的波動,而常規步進試驗數據是5s時間內的平均結果,因此相比較為光順。
從圖7還可以看出,迎角15.5°附近,如果步進試驗角度不加密,則難以捕捉各系數曲線此區域的彎曲變化,而連續掃描測試方法則可以充分反應出各系數的這種局部微小變化。
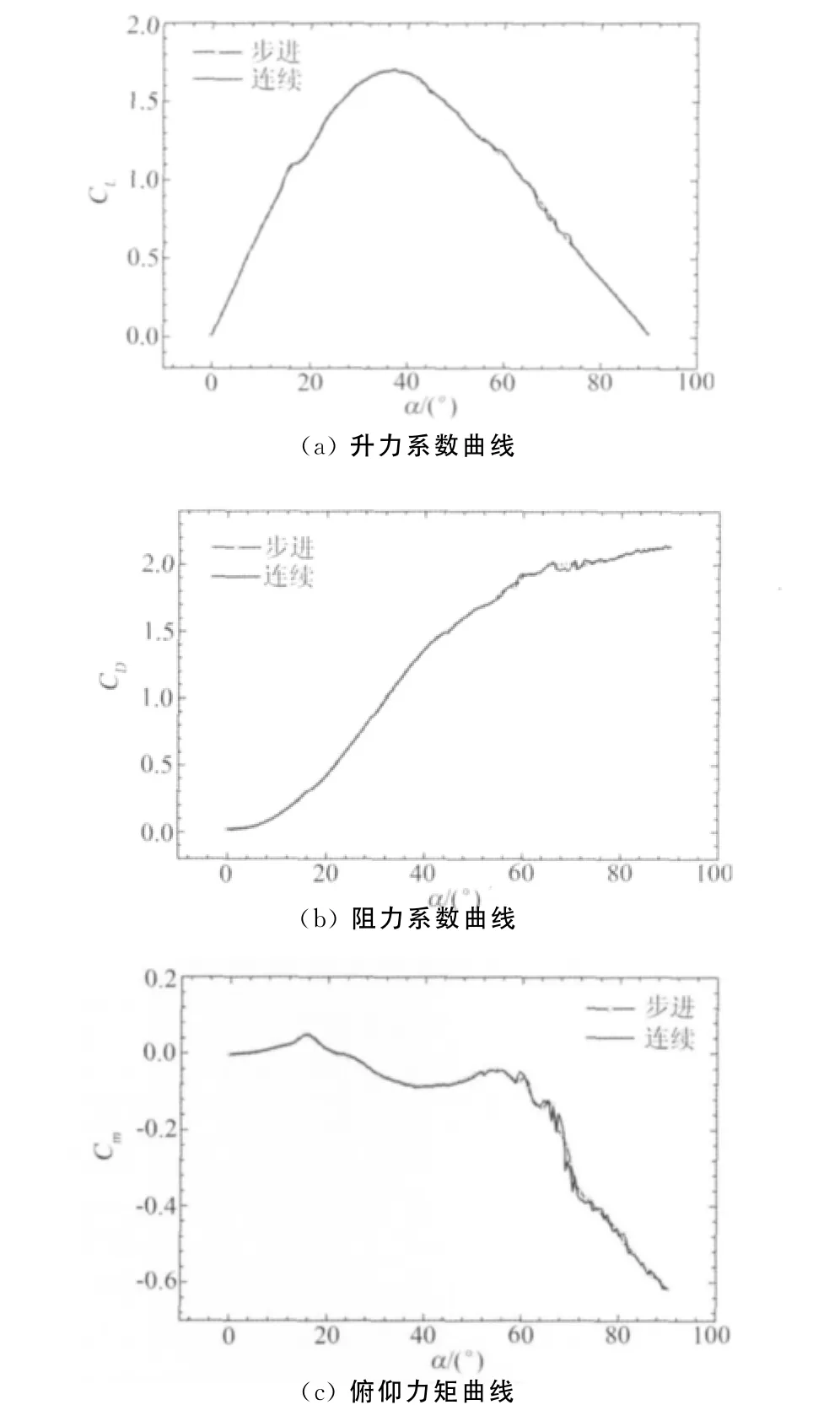
圖7 戰斗機步進與連續掃描試驗數據對比Fig.7 Comparison between step by step and continuous scan on one fighter plane
圖8為連續掃描試驗技術在運輸機布局上的應用結果曲線,由圖8可以看出:失速迎角16°之前,連續掃描結果與步進結果一致,最小阻力系數差別在0.3%之內。而在迎角18°后,二者有一定差異,這種差異可能是失速后的流場不穩定引起的。
4.4 試驗效率
連續掃描試驗技術可大幅提高試驗效率。針對戰斗機模型,步進試驗方式,角度間隔1°,迎角0°~90°范圍內,吹風時間約27min,而連續掃描試驗方式,同等迎角范圍,0.5°/s角速率吹風時間僅在4min之內,吹風時間大幅降低。考慮采集初讀數時間,可由54min節約到8min,效率明顯提升。
針對運輸機模型,迎角-6°~24°范圍內,獲取一條數據曲線的時間可由通常的20min縮短至5min。
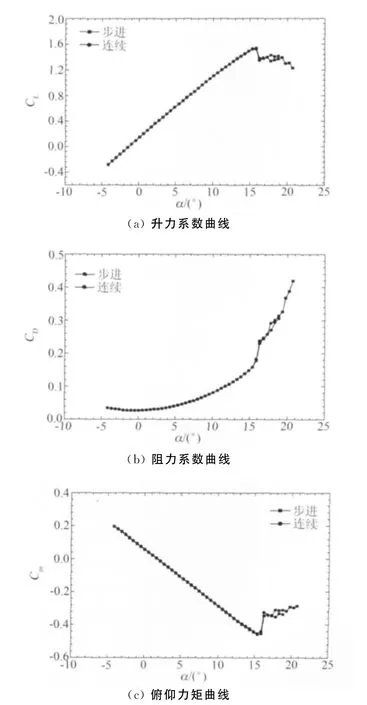
圖8 運輸機步進與連續掃描試驗數據對比Fig.8 Comparison between step by step and continuous scan on one transport aircraft
5 結 論
(1)通過對速壓、測控、實時迎角測量、試驗流程等各系統的改進,實現了8m×6m風洞特大迎角機構的連續掃描試驗技術,并成功地在戰斗機和運輸機布局中獲得了應用,試驗效率大幅提升;
(2)連續掃描試驗技術測試精度達到了步進試驗同等水平,符合國軍標使用要求;
(3)連續掃描試驗技術獲取的升力、阻力和俯仰力矩系數曲線與步進試驗方法吻合,獲取的數據信息量更為豐富。
[1] 孫海生,張暉.8m×6m風洞特大迎角試驗設備研制[J].實驗流體力學,2009,23(1):70-73.
[2] 葉吉成,肖京平.8m×6m風洞技術改造研究[J].流體力學實驗與測量,2001,15(3):75-76.
[3] 晉榮超,劉忠華.基于測控局域網集散系統的試驗管理軟件研制[J].流體力學實驗與測量,2001,15(4):90-94.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
