
旋翼/機身組合模型試驗臺技術改進及驗證
2012-11-15 11:34:08袁紅剛楊永東章貴川黃明其
實驗流體力學 2012年4期
袁紅剛,楊永東,章貴川,黃明其
(中國空氣動力研究與發展中心,四川 綿陽 621000)
0 引 言
為實現新型直升機旋翼模型大速度前飛試驗、旋翼/機身組合模型風洞試驗、以及旋翼/機身/尾槳組合模型風洞試驗的能力,2006年4月,中國空氣動力研究與發展中心(CARDC)成功研制了布局緊湊、支撐方式簡潔的旋翼/機身組合模型試驗臺。試驗臺采用新型可轉動減速器,配合長軸傳動,使試驗臺的支撐部分具有較規則的外形,減小了支架干擾;同時,研制了滿足要求的小體積、大功率的變頻電機,并采用“動力電機外置”的總體布局方案,保證了試驗臺整體布局的優化;試驗臺的動力傳動系統,不僅具有輸出軸在額定功率下變迎角的功能,還降低了活動臺架的質量,改善了試驗臺的動態特性,解決了直升機試驗中“地面共振”的問題。與國外同等能力的試驗臺相比,該試驗臺明顯地減小了體積,增強了臺體變換迎角的靈活性、可操作性和安全性。
近年來,CARDC對試驗臺各系統進行了不斷的完善和改進,成功完成了試驗臺標模系統研制,測量系統、旋翼操縱系統標定方法技術改進等工作,在此基礎上,發展了高精度配平技術,建立了更為接近真實飛行狀態的模擬試驗方法,進一步提升了試驗臺的水平與能力,為中國直升機型號研制和課題研究建立了可靠的試驗平臺。改進后的試驗臺,已經在多期旋翼懸停及風洞試驗中得到了應用,為型號研制中評估旋翼氣動性能和全機布局氣動特性提供了準確的試驗數據,也為旋翼流場測量等課題研究奠定了基礎。
1 技術改進內容
1.1 標模系統研制
為能夠使旋翼/機身組合模型試驗臺在帶負載運轉情況下,驗證考核各系統的性能,使試驗臺具有開展地面懸停及風洞試驗的能力,同時,建立以BO-105旋翼模型為核心的試驗臺標模體系,用于校驗試驗臺試驗數據質量,認定試驗數據的精準度,為試驗數據的應用提供可靠依據。2009年11月,配套研制了一套4m直徑的BO-105旋翼縮尺模型。
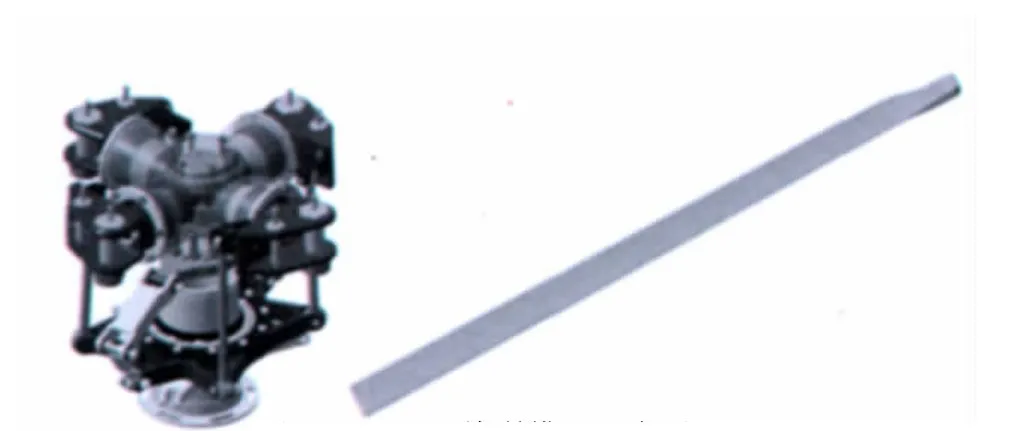
圖1 BO-105旋翼模型示意圖Fig.1 Sketch of BO-105rotor model
研制的旋翼標模系統包括槳葉模型、槳轂模型(含自動傾斜器)和專用配件等,如圖1所示。其中槳葉模型由復合材料組成,主要采用玻璃鋼和碳纖維(蒙皮)結構;槳轂模型采用無鉸式構型,只保留變矩鉸,擺振鉸和揮舞鉸的功能通過槳葉根部來實現。旋翼模型的主要參數如表1所示。
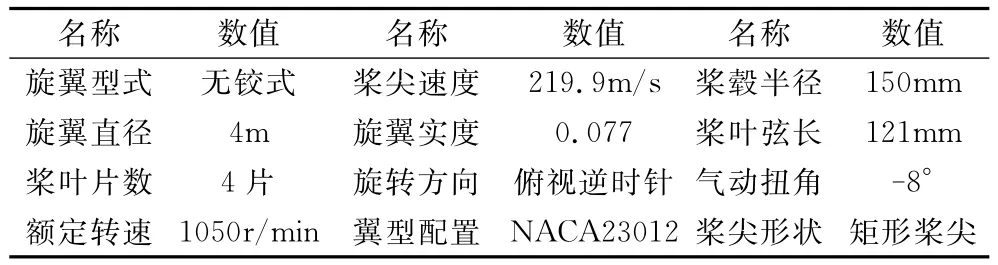
表1 BO-105旋翼模型參數表Table1 Parameters of BO-105rotor model
采用研制的BO-105旋翼模型,開展試驗研究,獲得了旋翼模型的性能數據,并與德國MBB公司設計制造的BO-105全動力相似模型的試驗結果進行了對比。圖2、3分別給出了懸停和前飛狀態下的性能對比曲線,從圖中可以看出,兩幅旋翼模型的試驗結果基本吻合,說明研制的模型符合技術指標要求,可作為試驗臺各系統驗證的標準模型。

圖2 懸停性能對比曲線Fig.2 Comparison of hover performance
1.2 測量系統改進
測量系統由旋翼天平和扭矩天平等組成。旋翼天平為六分量框式應變天平,使用力傳感器作為測量元,由七個傳感器單元的信號組合出六個分量,試驗時,旋翼天平安裝在機身模型內部,為滿足不同尺寸直升機機身模型的試驗要求,重新研制了小尺寸的旋翼天平。
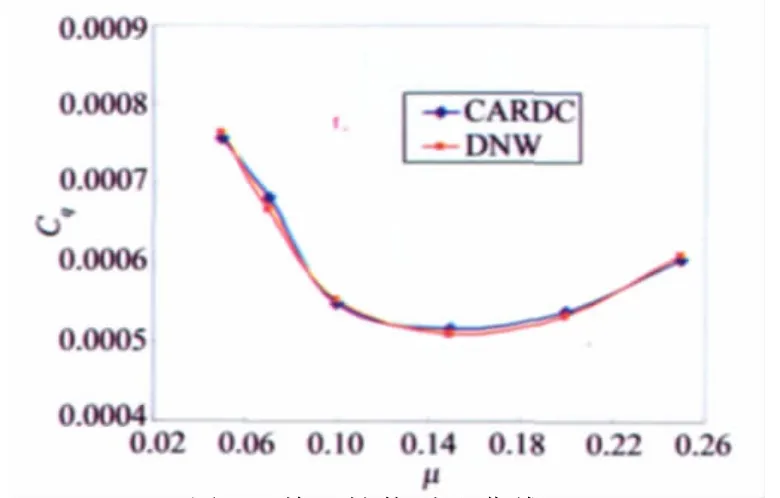
圖3 前飛性能對比曲線Fig.3 Comparison of forward flight performance
試驗臺原旋翼天平的外形尺寸為1030mm×360mm×330mm(長×寬×高),扭矩天平安裝其內部,如圖4所示,新研制的旋翼天平通過優化內部結構,使扭矩天平安裝置于外部,整體布局合理,其外形尺寸僅為682mm×320mm×160mm(長×寬×高),如圖5所示。新旋翼天平采用高精度進口力傳感器,保證了測量精度,同時,能夠與試驗臺現有的軸承座、旋翼軸、扭矩天平等組件配裝,可以滿足不同直升機旋翼機身組合模型風洞試驗的要求。改進后的測量系統具有結構緊湊、體積小、剛度大、試驗運行平穩、動態特性良好的特點,天平的精準度均優于0.3%。天平載荷范圍及靜校精準度如表2所示。

圖4 改進前的測量系統組件圖Fig.4 Photo of measure system discreteness before improving techniques
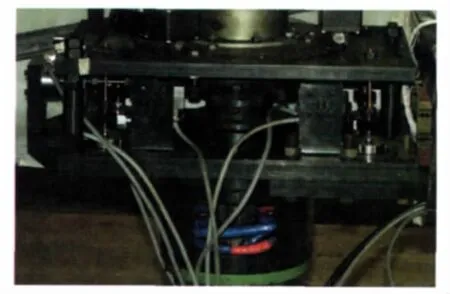
圖5 改進后的測量系統組件圖Fig.5 Photo of measure system discreteness after improving techniques
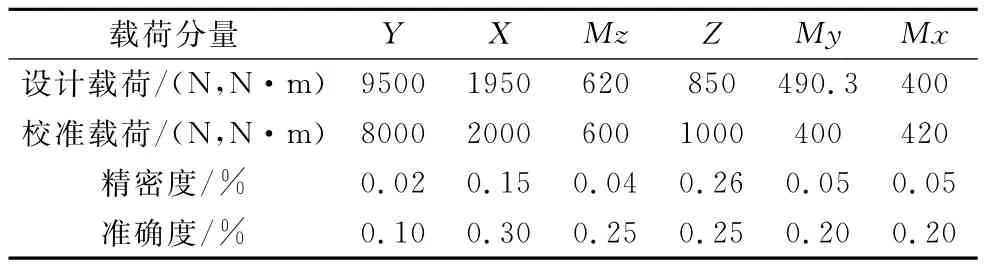
表2 旋翼天平載荷范圍及靜校精準度Table2 Results of rotor balance static calibration
1.3 旋翼操縱控制系統改進
試驗臺旋翼操縱系統模擬的是真實直升機的操縱系統,它通過全周期變距的操縱方式改變旋翼的姿態,不同之處在于使用3個作動筒替代真實直升機的機械式或者電液式的推拉桿機構,如圖6所示。
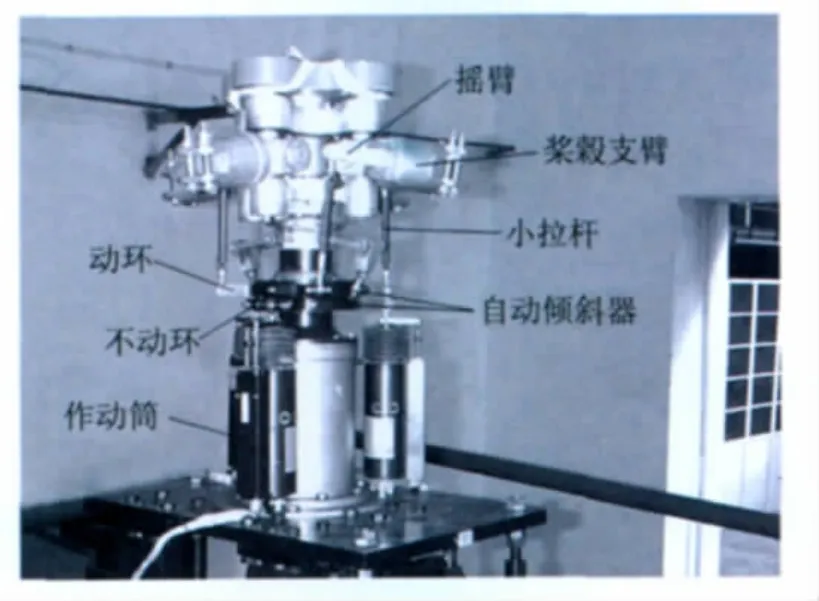
圖6 直升機旋翼操縱系統Fig.6 Helicopter rotor operation system
旋翼模型的操縱角θ:(θ0.7θSθC)和作動筒位移長度(Act:(Act1Act2Act3)之間可以近似為線性關系,轉換公式通常可表示為矩陣形式:

其中,Mp稱作正矩陣,Mn稱作逆矩陣,皆為3×3矩陣,且互逆。但在實際使用中,作動筒的零位并不能剛好就對應著操縱角的0°,所以這個公式還應該加入一個截距C:(C1C2C3),這個值就是操縱角都為零度時作動筒的位移值。轉換公式也就變為:

對如何獲得作動筒位移與旋翼操縱角的轉換公式,試驗臺原先采用現場標定的方法,即在模型安裝完畢之后,在現場通過標定獲得一系列槳距角與作動筒位移的對應關系,聯立求解超定方程組,獲得最小二乘意義下的解來作為轉換公式。這種方法存在數據精度較差、工作量大的弊端,而且,以作動筒位移為自變量測量相應的方位角,使可用范圍內的有效點偏少,不利于標定精度的提高。另外,槳距角的測量僅限于4個特定方位,方位角數據偏少,操縱角的計算結果誤差較大。為解決以上問題,建立了一套自動標定方法,對測量工具和方法進行了改進,即使用傾角傳感器替代傾斜儀,由自動化測量替代人手操作,用低速旋轉動態標定替代靜態標定,大大提高了旋翼操縱系統標定工作的測量精度和工作效率,從而提高了標定的準度,使之達到與控制系統精度相當的水平。自動標定時,傾角傳感器連接件安裝在槳葉連接處,傳感器半埋式安裝在其上,安裝槳葉后的校驗工作,在靜止狀態進行,使用夾件固定在槳葉上,安裝方式如圖7所示。
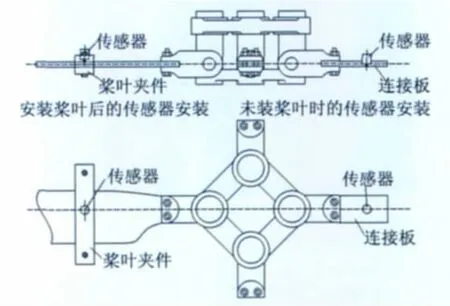
圖7 傾角傳感器在安裝槳葉前后的連接示意圖Fig.7 Sketch of obliquity sensor fore-and-aft fixing blades
自動標定是旋轉狀態下的動態標定,方位角的定位由編碼器的脈沖來確定,比人工旋轉更為精確,而且可以測量更多的方位,進一步提高了計算操縱角的精確度。標定引入了人工神經網絡控制系統,以操縱角作為自變量,自動控制作動筒運動到相應的狀態后進行測量計算,可以把標定的數據點都集中在可用范圍內,大大增加了標定的數據點,可以獲得更為精確的標定結果。測量完成后,計算工作將在標定系統的控制計算機中自動進行,計算結果可立即運用到操縱系統中進行校驗和修正,直至獲得符合精度要求的結果,整個工作可以做到高度的自動化,效率的提高非常顯著。
2 試驗驗證
應用改進后的旋翼/機身組合模型試驗臺,在8m×6m風洞中已成功完成了多期直升機旋翼模型試驗,獲得了高精度的試驗數據。
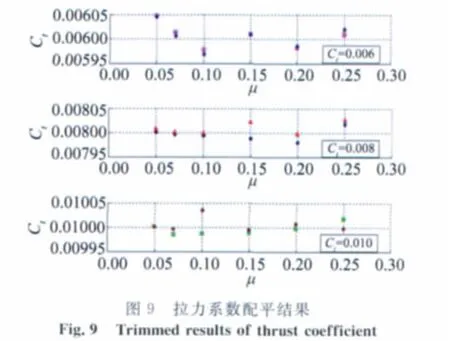
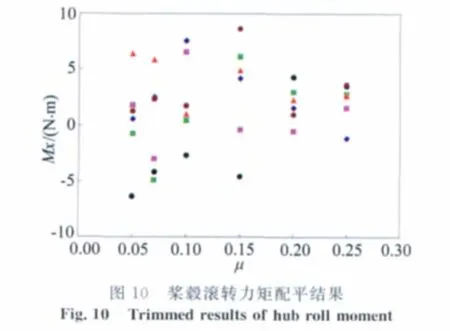
圖8為利用新研制BO-105旋翼模型,開展風洞試驗的照片。圖9給出了不同前進比下,拉力系數分別為0.006、0.008、0.010時所有試驗狀態下的配平結果。可以看出配平精度均優于0.5%,達到了很高水平。圖10、11分別給出了所有試驗點的槳轂滾轉力矩、俯仰力矩的配平結果。可以看出滾轉力矩L的配平值控制在±10Nm以內,俯仰力矩M的配平值控制在±12Nm以內,達到了較高的水平,滿足了試驗的要求。

3 結束語
圖11 槳轂俯仰力矩配平結果Fig.11 Trimmed results of hub pitch moment
旋翼/機身組合模型試驗臺配套的BO-105旋翼標模體系,建立了試驗臺系統和數據質量的校驗依據;研制的結構緊湊、測量精準度更高的旋翼天平,滿足了不同直升機旋翼/機身組合模型風洞試驗的要求;研究開發的自動化程度更高、操縱精準度更高的旋翼操縱系統自動標定裝置,實現了對旋翼模型的遠程精確實時控制。技術改進的成功,使試驗臺的能力和水平得到了進一步的完善和提升。經過多期試驗驗證,該試驗臺技術先進、性能指標優良,安全穩定性好,試驗數據精準度高,提高了中國直升機風洞試驗水平。
[1] 楊永東,袁紅剛,黃明其,等.CARDC的直升機氣動力試驗研究新進展[C].第二十二屆全國直升機年會學術論文集,2006.
[2] 袁紅剛,楊永東,黃明其.Ф4m旋翼機身組合模型試驗臺及應用[C].第二十二屆全國直升機年會學術論文集,2006.
[3] 袁紅剛,李進學,楊永東,等.懸停狀態下旋翼尾跡測量試驗研究[J].空氣動力學學報,2010,28(3):306-309.
[4] 袁紅剛,李進學,楊永東,等.前飛狀態旋翼尾跡測量試驗研究[J].實驗流體力學,2010,24(4):29-32.
[5] 袁紅剛,王天虹,黃明其.帶180kW動力擺動換向減速器研制[C].第二十三屆全國直升機年會學術論文集,2007.
[6] 孫正榮.Bo-105旋翼模型第二期8m×6m風洞對比試驗[C].第九屆全國直升機年會學術論文集,1993.
[7] 楊永東,袁紅剛.BO-105直升機模型風洞試驗結果比較[C].第十四屆全國直升機年會學術論文集,1998.
[8] 章貴川,吳志剛,許冰.直升機試驗臺旋翼操縱系統現場標定技術研究[C].第二十六屆全國直升機年會學術論文集,2010.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
光學精密工程(2016年6期)2016-11-07 09:07:19
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
核科學與工程(2015年4期)2015-09-26 11:59:03
