基于哈特曼傳感器的激光波前分布測量技術
2012-11-15 07:36:10王國星
中國測試 2012年5期
關鍵詞:測量
王國星,馬 沖
(1.中北大學機電工程學院,山西 太原 030051;2.中國計量科學研究院,北京 100013)
0 引 言
隨著激光應用在工業制造、光通信、醫療及軍事領域的擴大和深入,激光參數的計量需求在原有的激光功率、激光能量、激光波長基礎上,擴展至用于表述激光光束質量的空域參數[1-3]。2003年ISO 15367-1將激光波前分布列入了繼激光光束直徑、發散角之后用于表述激光傳輸特性和衡量光束質量的激光空域參數[4]之中。本文介紹了一種目前常用的波前分布測量技術,即基于哈特曼傳感器的哈特曼波前分布測量技術。在對該項技術測量原理、測量裝置、測量過程進行闡述的基礎上,重點引入一種對哈特曼傳感器中關鍵參數定標的方法,進一步保證了哈特曼激光波前分布測量的準確性和可靠性。
1 哈特曼激光波前分布測量原理
哈特曼激光波前分布測量裝置如圖1所示。激光源出射光束入射至哈特曼波前分析儀,哈特曼傳感器測量到通過針孔陣列落入CCD的像點的功率密度分布。數據采集分析系統在完成前期的CCD參數設置、CCD子區域劃分、背景噪聲的去除等任務后,接收到哈特曼傳感器分別對參考波前與被測波前采集的功率密度分布數據組,根據該數據確定參考波面與被測波前在各CCD子區域內像點的質心位置,進一步算出質心偏移量,得出波面在空間采樣點處斜率,最終通過算法重構波前。
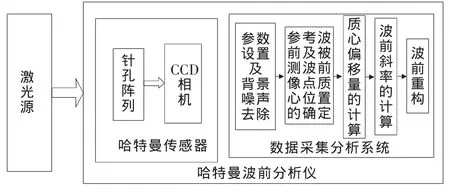
圖1 哈特曼波前分布測量裝置組成框圖
1.1 波前斜率測量
基于哈特曼傳感器的哈特曼波前分析儀的基本特點是,將入射激光波前測量轉化為對激光波前空間采樣點的波前斜率的測量。圖2顯示了參考波前和被測波前分別入射哈特曼傳感器時,落入CCD子區域內的像點及像點質心位置的偏移量。參考波前測量時,CCD子區域(i,j)內質心位置(xr,yr)i,j由經背景校正的像點功率密度分布E′(x,y)一階矩計算[5],如式(1)所示。
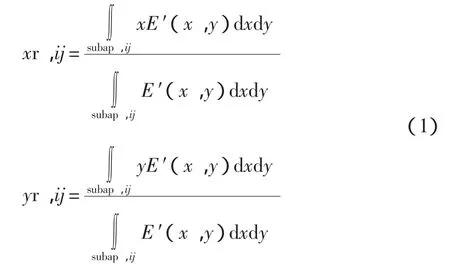
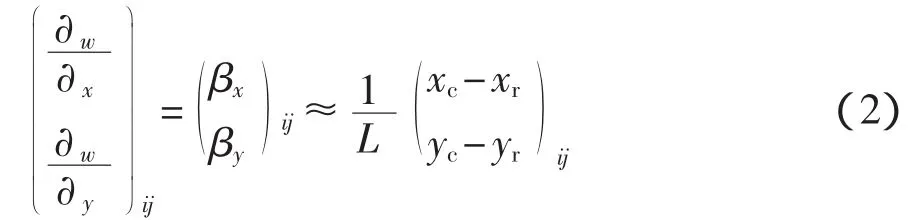
被測波前測量時,用同樣的方法計算出被測波前像點的質心位置(xc,yc)i,j。各空間采樣點波面的斜率(βx,βy)i,j,可以通過被測像點質心位置(xc,yc)i,j相對于參考像點質心位置(xr,yr)i,j的偏移量,除以針孔陣列與CCD陣列的間距L計算得出,如式(2)所示。
1.2 波前重構
上述方法測量的波前斜率數據作為已知數據,通過軟件算法重構波前。常用的波前重構算法有線性積分法和模式法[5]。線性積分法的波前重構從CCD陣列上下或左右某一邊際開始,初始區域波前高度為0,沿著掃描方向下一個相鄰積分區域的波前高度等于前一區域的波前高度加上前一積分區域的斜率與針孔間距的乘積,可用式(3)表示[6],其中d為針孔間距。聯立方程組,求其最小二乘解,得出整個被測區域的波前值。
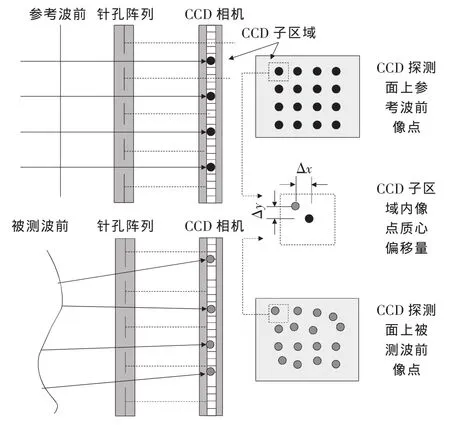
圖2 基于哈特曼傳感器的波前斜率測量示意圖

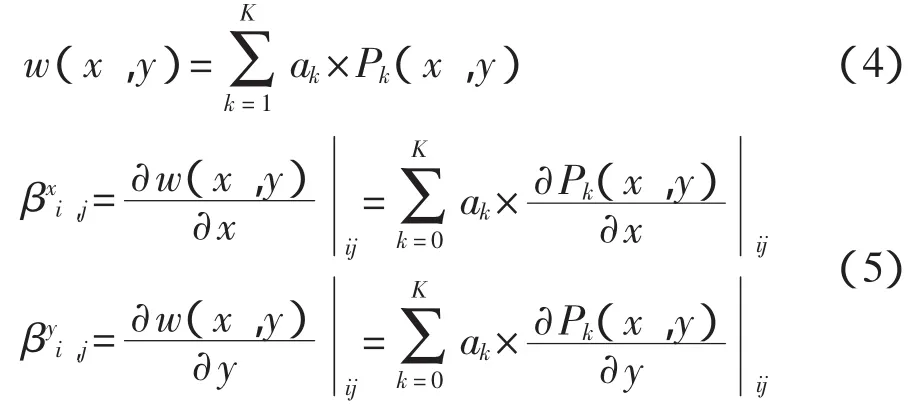
模式法波前重構是通過某一多項式序列表示波前,如常用的Zernike多項式,見式(4),其中Pk(x,y)為多項式的k次項,K為重構使用的多項式的次數,又稱模式數,多項式系數{ak}可通過已知斜率數據(βx,βy)i,j求出[6],見式(5)。
2 哈特曼波前分析儀針孔陣列與CCD間距的定標實驗
從式(2)可看出,波前的斜率不僅與哈特曼傳感器測得的質心偏移量有關,還與針孔陣列與CCD間距L有關。但針孔陣列與CCD機械安裝固定后,L是無法用常規長度計量方法測出;因此,針孔陣列與CCD間距的定標很重要,其值直接影響著波前斜率的準確性。
2.1 定標實驗裝置及過程
針孔陣列與CCD間距定標的裝置如圖3所示。氦氖激光器輸出激光束經光纖耦合器至單模光纖,光纖輸出點光源,點光源輸出為理想球面波,點光源放置在透鏡焦平面上輸出平面波,平面波作為參考波前,球面波作為被測波前用于定標針孔陣列與CCD 間距 L[7]。
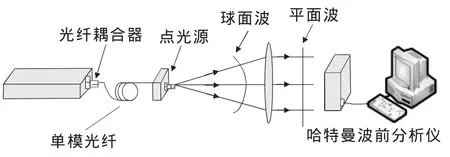
圖3 針孔陣列與CCD間距定標裝置示意圖
定標的基本原理是,當球面波入射哈特曼傳感器時,在CCD探測器面上球面波頂點沿x軸(或y軸)切線方向所成像點間隔相等,間隔Q為

式中:d——針孔間距,為已知參數;
R——球面波的曲率半徑,可以通過長度測量方法得知;
Q——像點間隔,可通過哈特曼傳感器測得;
L——針孔陣列與CCD陣列的間距。
此外,定標實驗中要求入射波面傾斜角盡量小,但點光源出射的球面波無法實現準直調光,為此在原有光路即激光器1、點光源、哈特曼傳感器的垂直方向上增加了激光器2、半透半反鏡、全反鏡等輔助裝置,以實現點光源出射球面波法線方向與哈特曼傳感器探測面垂直,并盡量入射在中心位置,如圖4所示。
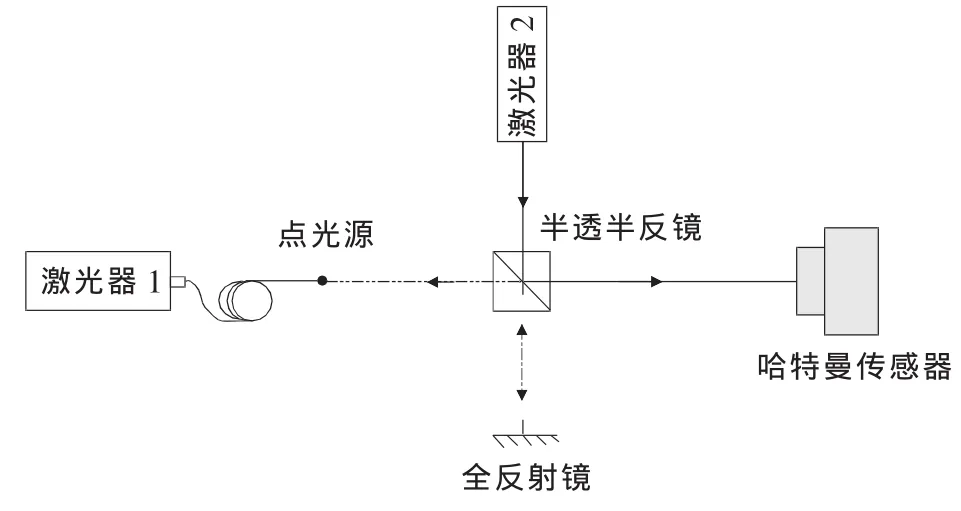
圖4 光路準直裝置示意圖
2.2 定標實驗結果及波前分布測量結果
沿光軸移動哈特曼傳感器,分別在點光源到哈特曼傳感器探測面間距,即球面波曲率半徑為2 000,1410,910,710及510mm 5個位置,按2.1中定標方法求出針孔陣列與CCD陣列的間距,實驗數據如圖5所示。取5點定標值的平均值6.67mm作為哈特曼傳感器針孔陣列與CCD陣列這一特定參數的取值。該值將在激光波前分布測量時參與波前斜率的計算,定標數據的標準偏差0.8%計入激光波前分布測量不確定度評定中。
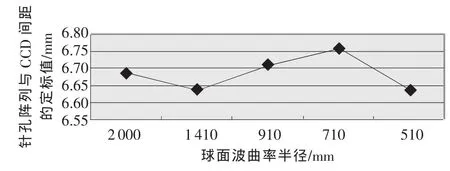
圖5 針孔陣列與CCD間距標定實驗數據
使用已定標的哈特曼波前分析儀測量激光波前分布,如圖6所示[8-9]。該次測量的波前測量準確度為1/35λ,波前余差等值線圖如7所示。從實驗結果中可看出,通過2.1方法定標的哈特曼波前分析儀測量激光波前分布準確度很高,該定標方法準確可靠。
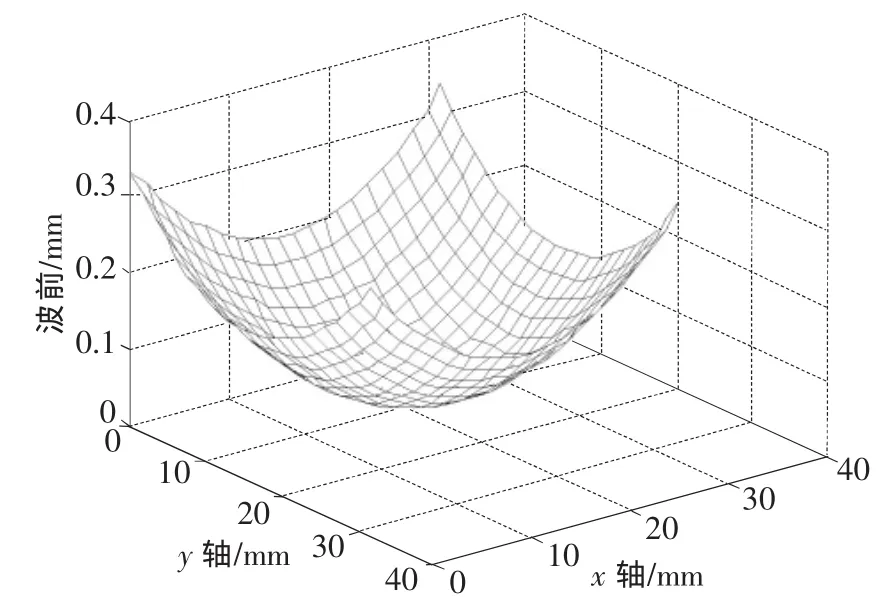
圖6 激光波前分布3D圖
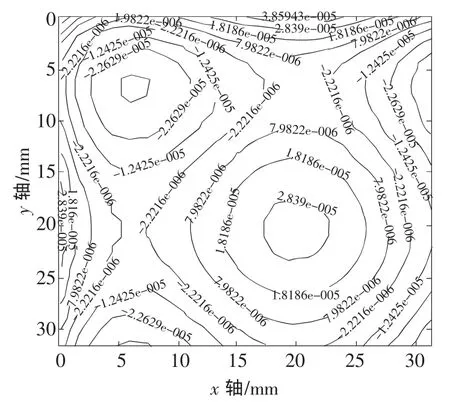
圖7 波前的余差等值線圖
3 結束語
哈特曼激光波前分布測量技術具有寬動態范圍、部分相干光束適用、可分辨2π整數倍的相位信息及適合單脈沖激光波前測量等優勢,是目前最常見的激光波前分布測量技術,哈特曼波前分析儀的商業化程度也遠遠高于其他波前測量儀器。從事激光波前分布測量的檢測人員需要重點掌握哈特曼波前分析儀的工作原理和測量過程。更需注意的是,哈特曼傳感器中針孔陣列與CCD的間距需要準確定標。此外,在研制和使用哈特曼傳感器時,應注意該參數與哈特曼傳感器波前斜率測量的動態范圍和靈敏度的關系:針孔陣列與CCD間距大,波前斜率測量的動態范圍小,但波前斜率測量的靈敏度大;反之,針孔陣列與CCD間距小,波前斜率測量的動態范圍大,但波前斜率測量的靈敏度小。
[1]姜漢文.哈特曼傳感器的應用[J].量子電子學報,1998(2):226-228.
[2]Alexandrov A.Adaptive system for laser beam formation[C]∥SPIE,2002(4770):59-62.
[3]王先培.哈特曼波前傳感器質心探測誤差分析[J].計量與測試技術,2010,37(9):29-30.
[4]ISO 15367-1:2003.Lasers and laser-related equipment-Test methods for determination of the shape of a laser beam wavefront-part1:Terminology and fundamental aspects[s].
[5]ISO 15367-2:2005.Lasers and laser-related equipment-Test methods for determination of the shape of a laser beam wavefront-part2:Shack-Hartmann sensors[s].
[6]Chernyshov A,Sterr U.Calibration of a shack-hartmann sensor for absolute measurements of wavefronts[J].Applied Optics,2005,44(2):6419-6425.
[7]周仁忠,閻吉祥.自適應光學理論[M].北京:北京理工大學出版社,1996:79-83.
[8]劉君華.虛擬儀器圖形化編程語言LabVIEW教程[M].西安:西安電子科技大學出版社,2001:28-53.
[9]張志涌.Matlab教程[M].北京:北京航空航天大學出版社,2010:108-112.
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
