高壓斷路器無刷直流電機機構模糊控制系統仿真分析*
2012-11-24 04:41:12劉愛民張紅奎趙前程
組合機床與自動化加工技術 2012年3期
劉愛民,張紅奎,趙前程,黃 旭
(沈陽工業大學電氣工程學院,沈陽 110870)
0 引言
近年來,隨著智能電網技術的迅猛發展,對電器設備的安全性和可靠性要求越來越高,斷路器作為電力系統的重要開關設備其智能化操作已是當今研究的熱點。在不同工作情況下,高壓斷路器觸頭的速度特性有很大差別。觸頭能否按理想曲線動作取決于操作機構的特性。傳統的操作機構采用彈簧、氣動和液壓等技術,連桿多、結構復雜、累計公差大難以實現斷路器分/合閘操作的可靠控制[1]。
電力電子技術的日臻成熟和電機機構應用到高壓電器領域,為高壓斷路器按理想曲線操作提供了可能。電機機構通過電機帶動絕緣拉桿進而驅動斷路器觸頭動作,完成分/合閘操作,運動部件少、結構簡單、動作分散小。采用先進的控制算法對電機機構動作進行精確控制,不僅可以使斷路器按理想速度特性曲線操作,還可以降低操作時產生的機械振動和噪音。
本文針對斷路器的操作要求,建立了高壓斷路器無刷直流電機機構控制系統的仿真模型。在詳細分析電機機構和模糊控制原理的基礎上,并對高壓斷路器分/合閘過程進行仿真分析。與常規PID控制方法相比,模糊自適應PID控制不但實現了電機機構運動的可靠控制,還大大提高了控制精度[2-3]。
1 無刷直流電機機構
1.1 無刷直流電機機構
無刷直流電機機構是由一臺配有制動裝置的有限轉角永磁無刷直流電機直接驅動傳動機構帶動斷路器分/合閘操作[4]。電機通過法蘭、傳動機構與斷路器轉軸連接,電機機構與斷路器之間的傳動機構由轉軸、拐臂、觸頭彈簧、絕緣拉桿和三角拐臂組成的一套四連桿機構(如圖1所示)。
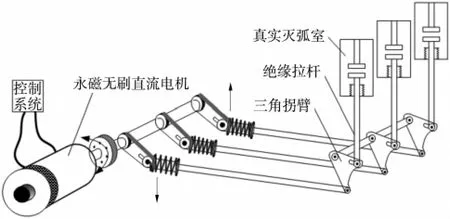
圖1 高壓斷路器永磁無刷直流電機機構的結構簡圖
1.2 無刷直流電機機構理想運動曲線
根據40.5kV高壓斷路器分/合閘運動特性,規劃無刷直流電機機構理想動作曲線(如圖2所示)。設分閘時間為0.016s,則最大速度可達2.45m/s,速度特性為:快~更快~慢~停止;合閘時間為0.02s,則速度最大值為2m/s,速度特性要求為:零~低速~高速~零,操作曲線應平滑,不出現明顯拐點。

圖2 無刷直流電機機構分/合閘操作速度——時間規劃曲線
2 模糊控制的基本原理
2.1 模糊控制的數學基礎
模糊集合理論是經典集合理論的擴展,在模糊集合理論中,一個元素既能部分地屬于一個模糊集合,又可以部分地屬于另一個模糊集合。由于模糊集合沒有明確的邊界,只能用隸屬函數來表示一個元素屬于一個集合的程度。具體定義如下:
設給定論域U,μA為U到封閉區間[0,1]的任一映射:

可以確定U的一個模糊集合A,μA稱為模糊集合A的隸屬函數。模糊集合和它的隸屬函數一一對應,模糊集的運算可通過隸屬函描述。
模糊關系描述元素之間關聯的程度,把普通集合關系的定義推廣到模糊集合中,便可得到模糊關系的定義,設兩個論域A和B,由A和B的直積可以得新論域A×B,A和B的模糊關系R就是定義在直積A×B上的一個模糊集合,它把論域上的每個元素(a,b)映射為0與1之間的隸屬度,即

式中隸屬度μR(a,b)表示序偶(a,b)具有關聯R的程度,當A=B時,R稱為A上的模糊關系。
2.2 模糊控制的基本原理
模糊控制系統(如圖3所示)的核心部分為模糊控制器,控制規則由軟件程序實現。計算機通過中斷采樣獲取被控量的精確值,然后與給定值比較得到誤差信號E作為模糊控制器的一個輸入量,把誤差信號E進行模糊化變成模糊量。將模糊量用模糊語言表示,得到誤差信號E的模糊語言集合的一個子集e,再由e和模糊控制規則R根據推理的合成規則進行模糊決策,得到模糊控制量u,即

的u為一個模糊量。
為了對被控對象施加精確控制,還需要將模糊量u清晰化轉換為清晰量。數字控制量經數模變換變為模擬量,送給執行機構,從而實現對被控對象的精確控制[5]。
3 高壓斷路器無刷直流電機機構控制系統建模
在MATLAB的Simulink的仿真環境下,采用模塊化方法將整個系統分成幾個功能模塊分別進行建模,通過這些模塊的有機組合,建立整個系統的仿真模型(如圖4所示)。其中電機模塊實現其內部各項參數的計算;換相模塊檢測電機轉子位置,為IGBT的通/斷提供驅動信號;可控電壓源和IGBT組成能量供應和調節模塊,為電機動作提供能量;速度環、轉矩環和位置環實現對被控量的實時調節[6-7]。

圖4 高壓斷路器無刷直流電機控制系統仿真圖
3.1 換相控制模塊
在仿真系統中,位置的判斷通過函數的形式產生一定頻率的方波信號。根據霍爾信號與開關管之間的邏輯關系,可以得到電機旋轉不同位置時對應的驅動信號狀態(如表1所示)。其中,數字0表示低電平,數字1表示高電平。

表1 霍爾信號與換相的對應關系
根據表1得出開關管的驅動信號與霍爾元件輸出信號之間邏輯的關系,建立無刷直流電機換相邏輯的仿真模型(如圖5所示)。
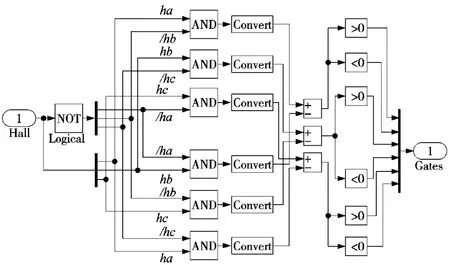
圖5 無刷直流電機換相邏輯模型
3.2 模糊自適應PID控制器
要提高模糊控制器的精度和跟蹤性能,控制量應選擇多種語言變量,分檔越細性能越好。但缺點是規則數和計算量大大增加,從而使調試更加困難,控制器的實時性也難以滿足要求。所以本文采用模糊和自適應PID混合控制策略(如圖6所示),即保留了模糊控制器快速響應的特點,同時系統穩定性也得到很大的提高。
轉速環以速度誤差e和誤差變化率ec作為輸入,系數KP、KI、KD作為輸出構造二維模糊控制器。e和ec經模糊化處理得到模糊語言變量E和Ec。E和Ec的模糊子集均為 {NB,NM,NS,Z,PS,PM,PB}。同樣,輸出量 KP、KI、KD的模糊子集均為{NB,NM,NS,Z,PS,PM,PB}。選取變量 E、Ec以及 KP、KI、KD的論域均{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},并設E、Ec服從高斯型隸屬函數曲線分布,KP、KI、KD服從三角型隸屬函數曲線分布。為了得到較好的穩態性能,對偏差E進行不規則劃分使得在E為零附近有較高的靈敏度,保證系統達到較高的穩態控制精度。輸入量的隸屬度函數如圖7所示。

圖6 模糊自適應PID控制的速度環

圖7 輸入隸屬度函數
為了便于觀察輸入量與輸出量的關系,在GUI中建立空間曲面,把整個論域上各個輸入量與輸出量間的函數關系表示出來(如圖8所示)。從圖可見,輸出曲面光滑,表明輸出函數連續性很好。

圖8 輸入量和輸出量曲面觀測窗
模糊控制規則是專家的經驗和操作者的技能加以總結而得出的模糊條件語句的集合。本模型的模糊規則可用以下49條模糊條件語句來描述:


根據上面的模糊規則進行精確化計算,把語言表達的模糊量回到精確數值,也就是根據輸出模糊子集的隸屬度和比例因子計算出輸出量的精確值。
4 高壓斷路器無刷直流電機機構控制系統仿真分析
控制系統仿真圖如圖9所示,采用速度、位置和轉矩三閉環控制。內環為轉矩環和位置環,采用傳統PID控制;外環為速度環,采用常規PID控制和模糊自適應PID控制兩種策略,并進行對比分析。將理想操作曲線與實際曲線比較,得到誤差信號,經過外環的速度調節,速度環輸出作為位置環的輸入,轉矩環以位置環的輸出作為輸入,調節后的輸出信號給可控電壓源提供控制信號,通過改變IGBT模塊母線電壓,實現對電機機構速度的調節。用模糊自適應PID控制的分閘操作仿真曲線,速度曲線基本與給定曲線重合,達到了較好的跟蹤效果。圖11為合閘操作仿真曲線,與分閘類似,常規PID控制仿真曲線誤差較大,尤其是前期波動較大,而模糊自適應PID控制可以實時調節系統參數,克服輸入量的變化所引起的偏差,速度跟蹤曲線與給定曲線基本一致,體現了智能控制算法的優越性。
5 結束語
本文對高壓斷路器無刷直流電機機構控制系統進行建模和仿真分析,模糊自適應PID控制器克服參數選取的影響,提高速度跟蹤的可靠性和精度。通過與傳統PID控制器的仿真結果比較,證明了模糊自適應PID控制器更適合高壓斷路器無刷直流電機機構的速度跟蹤控制。
電機機構應用到高壓電器領域有利于智能電器技術的發展和智能電網的建設。本文的研究成果為實現電機機構控制系統的設計和速度跟蹤控制提供了參考依據。筆者將通過相應實驗數據進一步證明

圖9 高壓斷路器無刷直流電機控制系統仿真圖
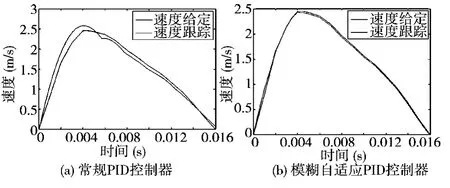
圖10 高壓斷路器無刷直流電機機構分閘操作速度跟蹤曲線
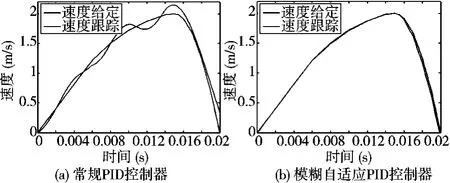
圖11 高壓斷路器無刷直流電機機構合閘操作速度跟蹤曲線
通過對系統進行仿真,得到的分/合閘操作速度跟蹤曲線如圖10、11所示,分閘操作持續16ms,合閘操作用時20ms,滿足斷路器操作時間要求。圖10a為采用常規PID控制分閘操作仿真曲線,分閘操作前期速度上升較大,跟蹤曲線有些偏差,圖10b為采本文研究的模型和仿真結果的有效性,相關研究成果在后續論文中體現。
[1]林莘.現代高壓電器技術[M].北京:機械工業出版社,2002.
[2]石辛民,郝整清.模糊控制及其MATLAB仿真[M].北京:清華大學出版社,2008.
[3]劉愛民,林莘.斷路器操動機構用圓筒型直線感應電動機控制系統研究[J].中國電機工程學報,2009,29(27):112-118.
[4]李永祥,林莘,徐建源.高壓斷路器永磁無刷直流電機操動機構的設計及動態仿真[J].電網技術,2010,34(1):185-189.
[5]紀志成,沈艷霞,薛花.無刷直流電機自適應模糊控制的研究[J]. 中國電機工程學報,2005,25(5):104-109.
[6]林莘,王德順,徐建源.高壓斷路器直線伺服電機操動機構及控制技術研究[J].中國電機工程學報,2008,28(27):137-141.
[7]張忠蕾,李慶民,婁杰.電力電子控制電動機操動機構分閘運動特性的仿真分析[J].電網技術,2006,30(18):58-63.