基于滑模控制的模型參考自適應(yīng)異步電機(jī)無(wú)速度傳感器控制*
2012-11-24 04:41:14彭達(dá)洲
組合機(jī)床與自動(dòng)化加工技術(shù) 2012年3期
王 任,彭達(dá)洲
(華南理工大學(xué)自動(dòng)化科學(xué)與工程學(xué)院,廣州 510640)
0 引言
異步電機(jī)無(wú)速度傳感器矢量控制系統(tǒng)主要需要解決轉(zhuǎn)速估計(jì)和轉(zhuǎn)子磁鏈觀測(cè)的問(wèn)題,文獻(xiàn)[1]綜合給出了現(xiàn)有的幾種異步電機(jī)轉(zhuǎn)速估算方法,其中模型參考自適應(yīng)系統(tǒng)(MRAS)是基于穩(wěn)定性理論設(shè)計(jì)的參數(shù)辨識(shí)方法,保證了參數(shù)估計(jì)的漸進(jìn)收斂性,且自適應(yīng)模型是確定的數(shù)學(xué)模型,便于數(shù)字化實(shí)現(xiàn),無(wú)論從理論研究和實(shí)際應(yīng)用上都是比較成熟的。
傳統(tǒng)MRAS是通過(guò)PI控制下的自適應(yīng)算法調(diào)整轉(zhuǎn)速ω^以使誤差ξ=0,然而PI控制方法需要調(diào)節(jié)復(fù)雜的增益系統(tǒng),且系統(tǒng)的魯棒性不高。近年來(lái),滑模變結(jié)構(gòu)控制理論取得了一定的研究進(jìn)展,尤其在各類電機(jī)的控制系統(tǒng)中有著廣泛的應(yīng)用背景[2],且滑模模態(tài)可以進(jìn)行設(shè)計(jì)且與對(duì)象參數(shù)及擾動(dòng)無(wú)關(guān),這就使得滑模控制具有快速響應(yīng)、對(duì)參數(shù)變化及擾動(dòng)不靈敏,無(wú)需系統(tǒng)在線辨識(shí),物理實(shí)現(xiàn)簡(jiǎn)單等優(yōu)點(diǎn)[3]。然而該方法的缺點(diǎn)在于當(dāng)狀態(tài)軌跡到達(dá)滑模面后,實(shí)際系統(tǒng)由于慣性、執(zhí)行機(jī)構(gòu)的切換滯后等非理想因素的存在,導(dǎo)致實(shí)際滑動(dòng)模不是準(zhǔn)確地發(fā)生在切換面上,容易引起系統(tǒng)的劇烈抖振。
針對(duì)以上問(wèn)題,本文設(shè)計(jì)了一種基于趨近律的滑模模型參考自適應(yīng)系統(tǒng)(SM MARS)。該方法既能利用滑模控制的強(qiáng)魯棒性和動(dòng)態(tài)性,同時(shí)也能有效減小滑模控制本身所固有的劇烈抖振問(wèn)題,有效的提高了異步電機(jī)無(wú)速度傳感器的控制性能。
1 模型參考自適應(yīng)系統(tǒng)(MRAS)
圖1所示模型參考自適應(yīng)系統(tǒng)(MRAS)的基本思想是用一個(gè)參考模型的輸出與另一個(gè)自適應(yīng)模型的輸出相比較,不斷調(diào)節(jié)后者,直到兩個(gè)模型的輸出相等。在MRAS轉(zhuǎn)速辨識(shí)方法中,將不含有真實(shí)轉(zhuǎn)速的磁鏈方程(1),(2)作為參考模型(轉(zhuǎn)子磁鏈電壓模型),含有待辨識(shí)轉(zhuǎn)速的磁鏈方程(3),(4)作為可調(diào)模型(轉(zhuǎn)子磁鏈電流模型)[4-5]。
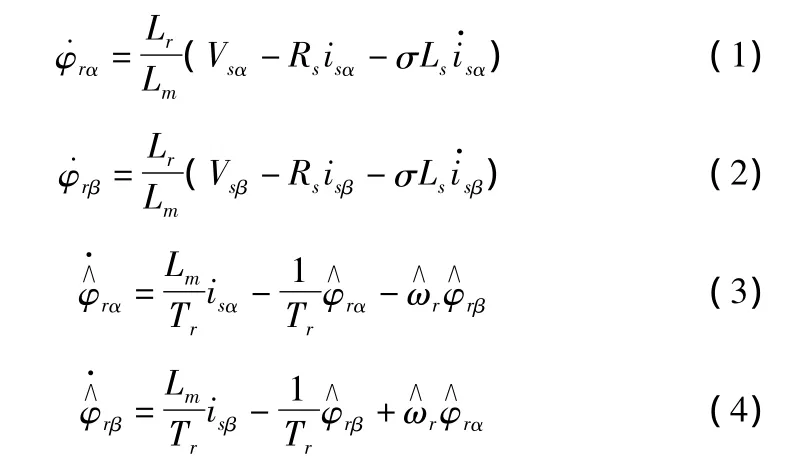
式中:φrα,φrβ——α 和 β 軸的轉(zhuǎn)子磁鏈;
Vsα,Vsβ——α 和 β 軸的定子電壓;
isα,isβ——α 和 β 軸的定子電流;
Rs,Rr——定子電阻、轉(zhuǎn)子電阻;
Ls,Lr——定子電感、轉(zhuǎn)子電感;
Lm——定轉(zhuǎn)子互感;
Tr=——轉(zhuǎn)子時(shí)間常數(shù)。
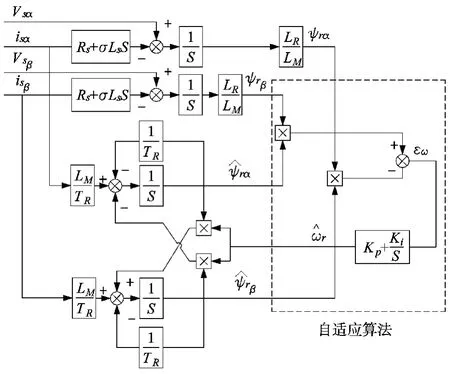
圖1 基于MRAS的速度估計(jì)原理框圖
在理想情況下,正確的轉(zhuǎn)速信號(hào)作用時(shí),由參考模型和自適應(yīng)模型計(jì)算得到的磁鏈?zhǔn)窍嗟鹊模处誶β=,φrβ=,通過(guò) PI控制下的自適應(yīng)算法使得可調(diào)模型的逼近真實(shí)的電機(jī)轉(zhuǎn)速ωr。為了保證系統(tǒng)的全局漸進(jìn)穩(wěn)定,用 Popov超穩(wěn)定性法[1,5]則可導(dǎo)出如下轉(zhuǎn)速估計(jì)關(guān)系式:

2 基于滑模控制的模型參考自適應(yīng)系統(tǒng)(SM MRAS)
滑模控制器的設(shè)計(jì)可分為兩個(gè)步驟:首先設(shè)計(jì)適當(dāng)?shù)那袚Q函數(shù)或切換流形使得系統(tǒng)進(jìn)入滑模運(yùn)動(dòng)后具有良好的動(dòng)態(tài)特性;其次要設(shè)計(jì)變結(jié)構(gòu)控制規(guī)律使得系統(tǒng)在有限時(shí)間內(nèi)到達(dá)切換流形并保持在它上面運(yùn)動(dòng)[2]。
2.1 切換函數(shù)的設(shè)計(jì)
本文提出用滑模控制器來(lái)調(diào)節(jié)估計(jì)速度的誤差。將速度調(diào)節(jié)信號(hào)(式5)選入適當(dāng)?shù)那袚Q函數(shù)[6]中:

這樣,在滑動(dòng)面S=0時(shí),誤差信號(hào)逐漸衰減到零。當(dāng)系統(tǒng)到達(dá)滑動(dòng)面,即:

然后誤差信號(hào)可以描述為

滑模控制器規(guī)則可選用李雅普諾夫函數(shù),即


由(5)可得:

將(3)和(4)代入(12)式得:
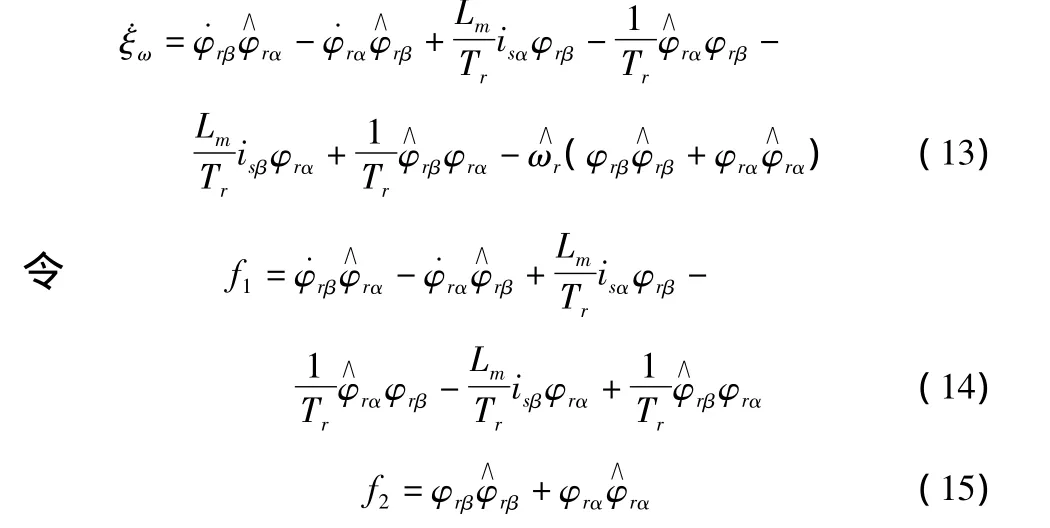
則式(13)可簡(jiǎn)寫為:
2.2 基于趨近律的滑模控制率的設(shè)計(jì)
實(shí)際系統(tǒng)由于切換裝置不可避免地存在慣性,變結(jié)構(gòu)系統(tǒng)在不同的控制邏輯中來(lái)回切換,因而導(dǎo)致實(shí)際滑動(dòng)模不是準(zhǔn)確地發(fā)生在切平面上,容易引起系統(tǒng)的劇烈抖動(dòng),為減小變結(jié)構(gòu)控制的抖振問(wèn)題,著名自動(dòng)控制專家高為炳[7]利用趨近率概念,提出了一種削弱抖動(dòng)的方法,通過(guò)調(diào)整趨近率參數(shù)來(lái)保證滑動(dòng)模態(tài)達(dá)到動(dòng)態(tài)品質(zhì)要求,同時(shí)減弱控制信號(hào)的高頻抖振。其表達(dá)形式為:

在此選用以上到達(dá)律來(lái)設(shè)計(jì),令:

將式(20)化為速度估計(jì)式得:

其中,sgn()函數(shù)定義為:

已經(jīng)證明此時(shí)對(duì)于確定的K,可通過(guò)選取適當(dāng)大的W加快達(dá)到滑動(dòng)模運(yùn)動(dòng)的時(shí)間[8],從而既保證了系統(tǒng)盡快進(jìn)入對(duì)系統(tǒng)干擾具有良好魯棒性能的滑動(dòng)模運(yùn)動(dòng),又可減弱系統(tǒng)抖動(dòng)對(duì)實(shí)時(shí)控制帶來(lái)的不利影響。
為了進(jìn)一步削弱滑模變結(jié)構(gòu)控制過(guò)程中出現(xiàn)的抖振,可以對(duì)sgn(S)采用開(kāi)關(guān)特性近似連續(xù)化的方法:

式中δ——小的正數(shù)。
當(dāng)δ很小時(shí),在切換面S(x)=0附近,控制具有很高的增益,這種高增益對(duì)于抑制抖振有利。由式(22)和(24)可得到基于SM MRAS的速度觀測(cè)器。在搭建仿真模型時(shí),式(21)中f2初始值可能為0,運(yùn)行時(shí)除法會(huì)出錯(cuò),所以起始時(shí)可以給f2一個(gè)很小的初值,見(jiàn)圖2所示。

圖2 基于SM MRAS的速度估計(jì)原理框圖
3 仿真結(jié)果及分析
為了驗(yàn)證該方法的相比于傳統(tǒng)MRAS的優(yōu)勢(shì),在MATLAB/SIMULINK 7.1下進(jìn)行仿真實(shí)驗(yàn),仿真原理圖如圖3所示。
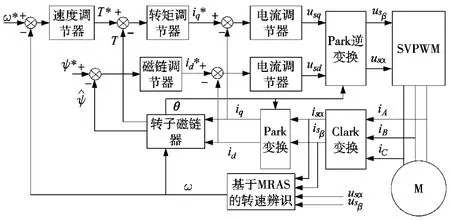
圖3 異步電機(jī)無(wú)速度傳感器矢量控制原理框圖
電機(jī)模型參數(shù)為:Rs=0.7384(ohm),Rr=0.7403(ohm),Ls=0.003045(H),Lm=0.1241(H),Lr=0.003045(H),Np=2,J=0.0343kg·m2。首先在空載的情況下,給定電機(jī)轉(zhuǎn)速初始值為150rpm,在0.45s階躍變?yōu)?150rpm。
圖4與圖5分別為傳統(tǒng)MRAS和SM MRAS的仿真曲線圖,其中包含實(shí)際轉(zhuǎn)速、估計(jì)轉(zhuǎn)速以及兩者的誤差曲線。上面兩圖對(duì)比可知,傳統(tǒng)MRAS和SM MRAS估計(jì)的轉(zhuǎn)速都能很好的跟蹤實(shí)際轉(zhuǎn)速,而SM MRAS的響應(yīng)速度相比于傳統(tǒng)MRAS要快很多。傳統(tǒng) MRAS的最大靜態(tài)誤差 (()×100%)為0.4%,而SM MRAS的最大靜態(tài)誤差僅為0.15%,轉(zhuǎn)速估計(jì)精度要高許多。
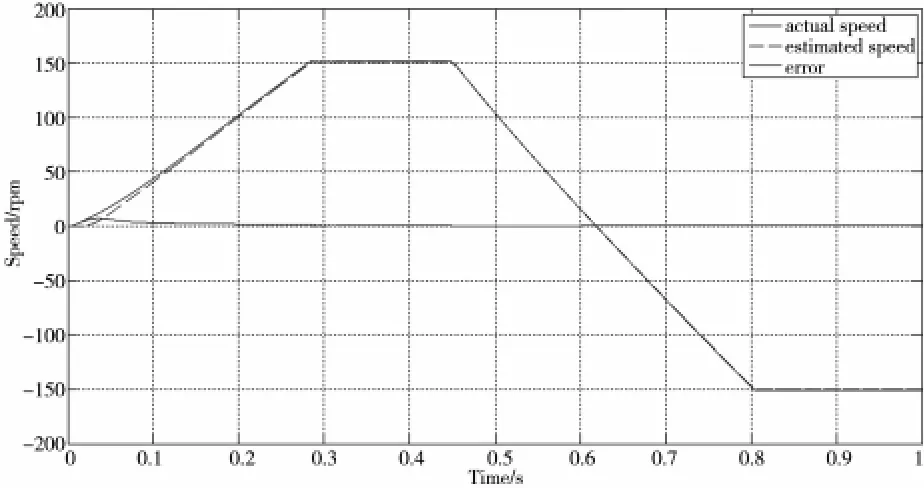
圖4 基于傳統(tǒng)MRAS的轉(zhuǎn)速估計(jì)仿真結(jié)果
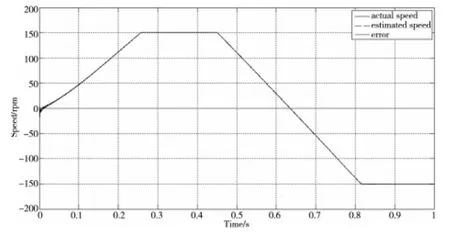
圖5 基于SM MRAS的轉(zhuǎn)速估計(jì)仿真結(jié)果
圖6和圖7為穩(wěn)態(tài)時(shí)SM MRAS的放大仿真曲線圖,從中可以看出滑模控制器跟蹤狀態(tài)的開(kāi)關(guān)特性。圖6為普通滑模控制器的轉(zhuǎn)速估計(jì),圖7為轉(zhuǎn)速穩(wěn)定時(shí)基于趨近律的滑模控制器的轉(zhuǎn)速估計(jì)效果,對(duì)比可得該方法對(duì)抖振有很好的抑制作用。
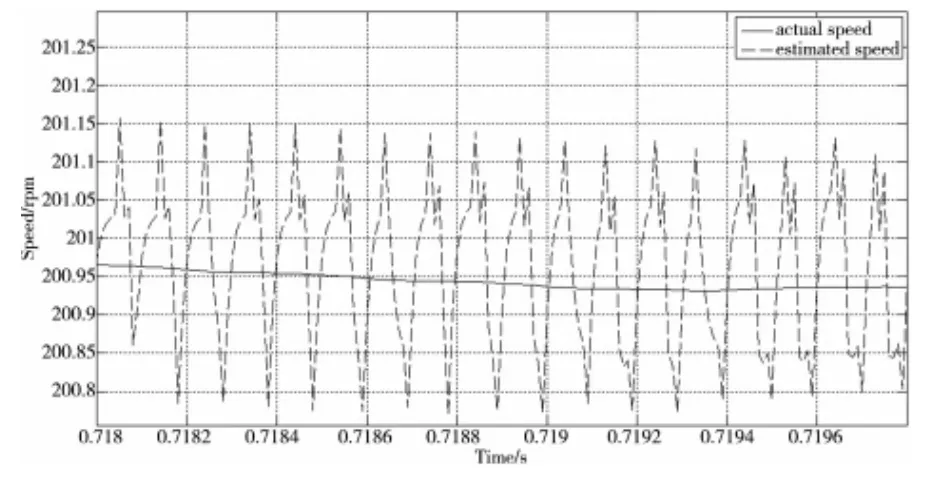
圖6 普通滑模控制器的轉(zhuǎn)速估計(jì)仿真結(jié)果
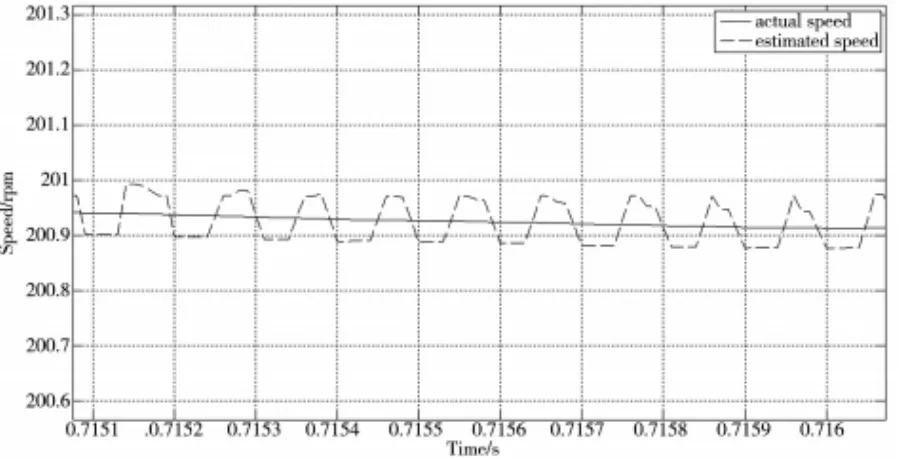
圖7 基于趨近律的滑模控制器的轉(zhuǎn)速估計(jì)仿真結(jié)果
4 結(jié)束語(yǔ)
仿真結(jié)果表明,基于SM MRAS的異步電機(jī)無(wú)速度傳感器矢量控制系統(tǒng)相比于傳統(tǒng)MRAS響應(yīng)速度更快,轉(zhuǎn)速估計(jì)精度更高,且省去了復(fù)雜的PI增益調(diào)節(jié)。采用滑模控制也能使系統(tǒng)對(duì)內(nèi)部參數(shù)攝動(dòng)、外部干擾、測(cè)量誤差及測(cè)量噪聲等具有完全的自適應(yīng)性。本文采用的基于趨近律的滑模模型參考自適應(yīng)系統(tǒng)對(duì)抖動(dòng)也有很好抑制作用,這對(duì)系統(tǒng)的穩(wěn)定性和實(shí)時(shí)控制無(wú)疑會(huì)有很大促進(jìn)作用。
[1]Bimal K.Bose,著,王聰?shù)龋g.現(xiàn)代電力電子學(xué)與交流傳動(dòng)[M].北京:機(jī)械工業(yè)出版社,2005.
[2]胡躍明.變結(jié)構(gòu)控制理論與應(yīng)用[M].北京:科學(xué)出版社,2003.
[3]劉金琨,孫富春.滑模變結(jié)構(gòu)控制理論及其算法研究與進(jìn)展[J]. 控制理論與應(yīng)用,2007,24(3):407-418.
[4]Shady M.Gadoue,Damian Giaouris,John W.Finch.MRAS sensorless vector control of an induction motor using new sliding-mode and fuzzy-logic adaption mechanisms[J].IEEE Transactions on Energy Conversion,2010,25(2):394-402.
[5]Veran Vasic’,Slobodan N.Vukosavic,Emil Levi.A stator resistance estimation scheme for speed sensorless rotor flux orinted induction motor drives[J].IEEE Transactions on Energy Conversion,2003,18(4):476-483.
[6]Mihai Comanescu,Longya Xu.Sliding-Mode MRAS Speed estimators for sensorless vector control of indcuction machine[J].IEEE Transactions on Industrial Electronics,2006,53(1):146-153.
[7]高為炳.變結(jié)構(gòu)控制的理論和設(shè)計(jì)方法[M].北京:科學(xué)出版社,1996.
[8]鐘義長(zhǎng),鐘倫瓏,黃峰.基于滑模變結(jié)構(gòu)的異步電機(jī)矢量控制及實(shí)現(xiàn)[J].電氣傳動(dòng)自動(dòng)化,2009,31(6):7-9,26.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19