一種基于磁阻傳感器的實(shí)時(shí)方向隨動(dòng)系統(tǒng)
2012-12-01 10:07:52賴于樹向利平
自動(dòng)化儀表 2012年1期
賴于樹 郭 鑫 向利平 余 波
(重慶三峽學(xué)院物理與電子工程學(xué)院,重慶 萬州 404000)
0 引言
實(shí)時(shí)方向隨動(dòng)控制系統(tǒng)在汽車燈光方向控制、智能輪椅和雷達(dá)天線等領(lǐng)域有著廣泛的應(yīng)用。目前,基于磁阻傳感器,利用地磁場(chǎng)探測(cè)技術(shù)測(cè)量方向角已有成熟的解決方案[1]。本文將地磁探測(cè)技術(shù)與加速度測(cè)量技術(shù)相結(jié)合,提出了一種實(shí)時(shí)方向隨動(dòng)系統(tǒng)。該系統(tǒng)可應(yīng)用于地質(zhì)監(jiān)測(cè)、車載雷達(dá)、機(jī)器人以及實(shí)驗(yàn)儀器等醫(yī)療器械等領(lǐng)域的實(shí)時(shí)方向控制。測(cè)量分析表明,該系統(tǒng)可以較好地實(shí)現(xiàn)移動(dòng)載體的實(shí)時(shí)方向隨動(dòng)控制。
1 實(shí)時(shí)方向隨動(dòng)原理
1.1 磁阻傳感器測(cè)量原理
基于某些金屬的各向異性磁電阻效應(yīng),設(shè)計(jì)了磁阻傳感器。各向異性磁電阻效應(yīng)是指對(duì)于強(qiáng)磁性金屬(鐵、鈷、鎳等及其合金),當(dāng)外加磁場(chǎng)平行于磁場(chǎng)內(nèi)部磁化方向時(shí),阻值不變;若外界磁場(chǎng)方向偏離時(shí),則其阻值減小。如果把這類金屬做成薄膜帶狀導(dǎo)線,當(dāng)電流通過時(shí),其阻值大小隨內(nèi)外兩磁場(chǎng)的合成磁化方向與電流流向的相對(duì)關(guān)系發(fā)生變化,趨于同向時(shí)阻值增大,背向時(shí)則阻值減小[2-5]。
地球磁場(chǎng)的強(qiáng)度大約為0.05~0.06 mT,現(xiàn)有的磁阻傳感器可以很好地測(cè)量地磁場(chǎng)范圍內(nèi)的磁場(chǎng)強(qiáng)度。但在實(shí)際應(yīng)用中,磁阻傳感器一般不在水平面上工作。磁傳感器姿態(tài)圖如圖1所示。
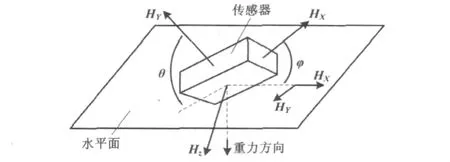
圖1 磁傳感器姿態(tài)圖Fig.1 Attitude diagram of the magnetoresistive sensor
當(dāng)磁阻傳感器偏離水平面一定角度時(shí),就會(huì)產(chǎn)生較大的傾角誤差。為了確定此時(shí)的方向偏角,就需要測(cè)量地磁場(chǎng)在空間三個(gè)軸上的分量磁場(chǎng)大小HX、HY、HZ,并采用加速度傳感器測(cè)量俯仰角φ和橫滾角θ,以補(bǔ)償傾角誤差。
在測(cè)得 HX、HY、HZ、φ、θ后,將這些數(shù)據(jù)代入式(1)與式(2),可得到磁場(chǎng)強(qiáng)度在水平面上的分量HX、HY。

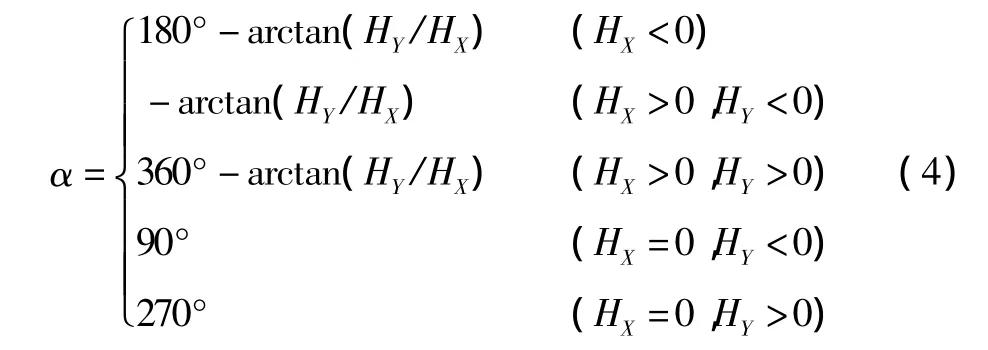
磁阻傳感器方向和地磁北極之間的夾角為α,其表達(dá)式為:

考慮到正切函數(shù)的周期為180°,為了保證數(shù)據(jù)的有效性,可將方向角α按條件分段表示,由式(4)即可轉(zhuǎn)換得到 0°~360°范圍內(nèi)的方向角[6-8]。
1.2 實(shí)時(shí)方向隨動(dòng)原理
基于磁阻傳感器的實(shí)時(shí)方向隨動(dòng)技術(shù)是通過磁阻傳感器和加速度傳感器相結(jié)合來測(cè)量移動(dòng)載體方向角,并可根據(jù)設(shè)定方向或跟蹤方向隨時(shí)調(diào)整載體的運(yùn)動(dòng)方向。磁阻傳感器體積小、功耗低、易于安裝,且溫度特性好、實(shí)時(shí)性和抗干擾能力強(qiáng),誤差不隨時(shí)間積累。因此,在實(shí)時(shí)方向隨動(dòng)系統(tǒng)中采用磁阻傳感器具有明顯的優(yōu)勢(shì)。
本文提出的實(shí)時(shí)方向隨動(dòng)系統(tǒng)采用兩個(gè)三軸磁阻傳感器模塊與一個(gè)加速度傳感器模塊相結(jié)合,在測(cè)量時(shí)采用角度差值法。該方法能抵消隨著測(cè)量角的增大而帶來的誤差。測(cè)量時(shí),首先由加速度傳感器測(cè)得俯仰角φ和橫滾角θ,由磁阻傳感器A和B各自測(cè)得三個(gè)軸上的分量磁場(chǎng)HX、HY、HZ;然后根據(jù)測(cè)量與計(jì)算原理,分別求出磁阻傳感器A和B水平面的方向角αA和αB(αA和αB分別為磁阻傳感器A、B與地磁北之間的夾角)。
對(duì)回歸方程偏導(dǎo)求解,可得出香辣藕片的最佳工藝條件:硬化溫度為31.23 ℃,浸泡時(shí)間為2.16 h,硬化劑濃度為1.15%。根據(jù)實(shí)際操作情況修正為:硬化溫度31 ℃,硬化劑濃度1.1%,浸泡時(shí)間2 h,符合國(guó)家標(biāo)準(zhǔn)[24]。在此條件下進(jìn)行3次驗(yàn)證實(shí)驗(yàn),得到香辣藕片的硬度為701.36,與預(yù)測(cè)值707.78基本一致,相對(duì)誤差為0.91%,而感官評(píng)分此時(shí)達(dá)到92.60分。綜上,說明所得模型與實(shí)際情況擬合程度較好,能夠反映硬化溫度、浸泡時(shí)間和產(chǎn)品硬度以及感官評(píng)分之間的關(guān)系,可采用該模型對(duì)香辣藕片的品質(zhì)進(jìn)行預(yù)測(cè)。
系統(tǒng)測(cè)量方法示意圖如圖2所示。需要識(shí)別或跟蹤的方向角α可通過兩個(gè)磁阻傳感器的方向角相減得到,即 α=αB-αA。
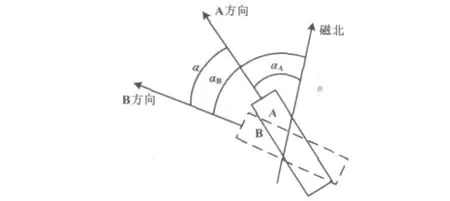
圖2 系統(tǒng)測(cè)量方法示意圖Fig.2 Measuring method of the system
2 實(shí)時(shí)方向隨動(dòng)系統(tǒng)的實(shí)現(xiàn)
2.1 硬件結(jié)構(gòu)
實(shí)時(shí)方向隨動(dòng)系統(tǒng)框圖如圖3所示。
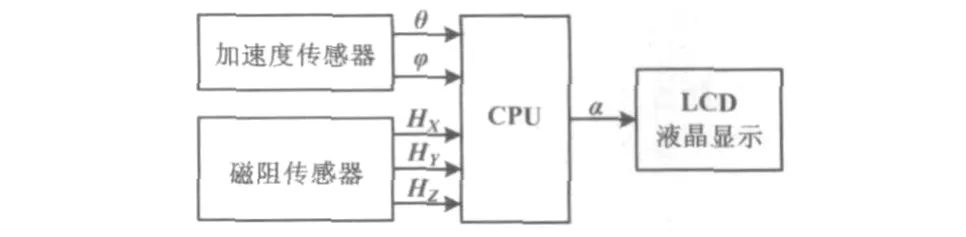
圖3 實(shí)時(shí)方向隨動(dòng)系統(tǒng)框圖Fig.3 Block diagram of the real-time direction servo system
系統(tǒng)主要由加速度傳感器模塊、磁阻傳感器模塊、微處理器模塊(CPU)和液晶顯示模塊組成。系統(tǒng)以微處理器模塊為核心,將來自磁阻傳感器模塊和加速度傳感器模塊的數(shù)據(jù)信號(hào)進(jìn)行各種分析處理,并計(jì)算出所需識(shí)別的方向角值。磁阻傳感器模塊將采集的地磁場(chǎng)信號(hào)轉(zhuǎn)換為電信號(hào),同時(shí)對(duì)微弱的電磁信號(hào)進(jìn)行放大濾波和模數(shù)轉(zhuǎn)換,最后以數(shù)字信號(hào)輸入到CPU。加速度傳感器模塊測(cè)量俯仰角φ和橫滾角θ,以補(bǔ)償傾角誤差。液晶顯示模塊起到顯示作用,可直觀地顯示出方向差角α及各種參數(shù)與信息。
此外,在主控芯片的選擇方面,需要考慮數(shù)據(jù)采集及A/D轉(zhuǎn)換任務(wù)重等因素,選用集成多個(gè)定時(shí)器單元和A/D單元的芯片,并滿足低功耗設(shè)計(jì)需求。在供電系統(tǒng)的設(shè)計(jì)方面,需要考慮電磁干擾等問題,即通過合理布局與優(yōu)化設(shè)計(jì),減小電源對(duì)測(cè)量系統(tǒng)帶來的干擾。
2.2 軟件設(shè)計(jì)
數(shù)據(jù)處理算法是提高系統(tǒng)測(cè)量精度、確保實(shí)時(shí)性的關(guān)鍵。本系統(tǒng)的軟件部分采用模塊化設(shè)計(jì),并采用“標(biāo)志法”來避免程序跑飛,即在執(zhí)行某一模塊時(shí),為即將進(jìn)入的下一模塊設(shè)置一個(gè)標(biāo)志碼。系統(tǒng)進(jìn)入該模塊后再檢查這一標(biāo)志碼。系統(tǒng)如正常則執(zhí)行,反之則進(jìn)入錯(cuò)誤處理程序。
程序總體結(jié)構(gòu)分為系統(tǒng)主程序和各功能模塊子程序兩部分。其中主程序負(fù)責(zé)有效地管理系統(tǒng)的軟硬件資源,完成對(duì)子程序的及時(shí)響應(yīng)和調(diào)用。主程序流程如圖4所示。
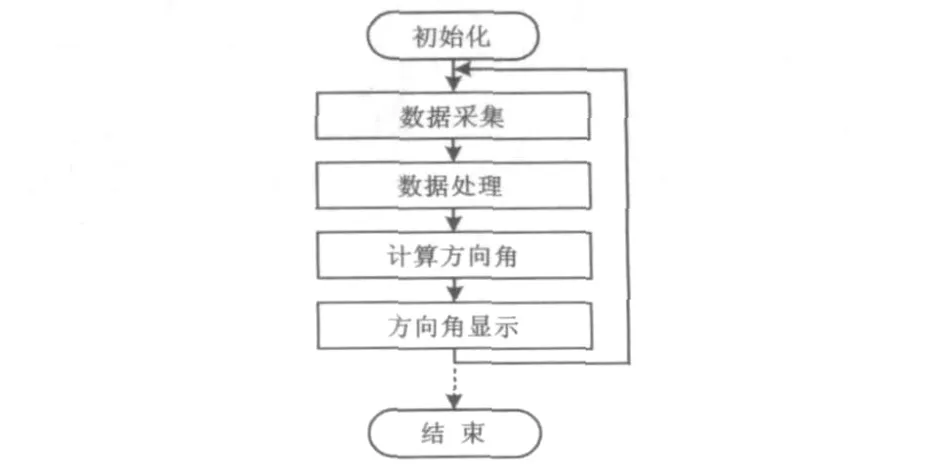
圖4 主程序流程圖Fig.4 Main flowchart of process
在具體算法設(shè)計(jì)過程中,需要重點(diǎn)考慮系統(tǒng)的實(shí)時(shí)性、干擾性、同步性、低功耗和信號(hào)抖動(dòng)性等問題。程序首先完成初始化任務(wù),主要包括系統(tǒng)存儲(chǔ)器的選擇、時(shí)鐘的選擇、管腳的分配、中斷優(yōu)先級(jí)、SPI同步串口初始化、中斷模式、A/D的配置、定時(shí)器時(shí)鐘和工作方式的選定等。由于磁阻傳感器輸出的信號(hào)抖動(dòng)較大,為提高系統(tǒng)的抗干擾性,獲得較為穩(wěn)定可靠的數(shù)據(jù),在數(shù)據(jù)處理算法上采用了多點(diǎn)采集求平均法,并運(yùn)用數(shù)據(jù)結(jié)構(gòu)中的循環(huán)鏈表。
3 應(yīng)用實(shí)例
3.1 傳感器的選擇
系統(tǒng)采用HMC5883三軸磁阻傳感器來測(cè)量空間三個(gè)正交方向(HX、HY、HZ)的磁場(chǎng)強(qiáng)度大小,磁場(chǎng)測(cè)量范圍為10-6~0.6 mT。以此為核心組成的磁阻傳感器模塊自帶有放大器、驅(qū)動(dòng)器、偏置消除單元、12 bit ADC轉(zhuǎn)換器和1個(gè)I2C系列總線接口。
加速度傳感器選用ST公司的LIS3LV02DQ微加速度傳感器。該傳感器帶寬可調(diào),具有方向檢測(cè)功能,12 bit/16 bit ADC轉(zhuǎn)換器以及SPI/I2C標(biāo)準(zhǔn)數(shù)字接口。該傳感器是一個(gè)量程為±2 g或±6 g的三軸低電壓線性加速度傳感器,由它組成的傳感器模塊具有尺寸小、功耗小以及噪聲低等特點(diǎn)。
3.2 微處理器部分
系統(tǒng)選擇DSP TMS320F2812作為核心控制芯片。該芯片是一款高性能的數(shù)字信號(hào)處理器,它具有較高的頻率和豐富的外圍接口,尤其適用于電機(jī)系統(tǒng)控制。TMS320F2812主頻可達(dá)150 MHz,具有低功耗特性(核電壓為1.8 V、I/O 電壓為3.3 V);具有128 kB ×16位片上Flash、18 kB×16位片上 SRAM、4 kB×16位片上ROM。在用于電機(jī)控制的外設(shè)方面,配置有2個(gè)事件管理器、多種標(biāo)準(zhǔn)串口外設(shè)、1個(gè)SPI同步串口、2個(gè)UART異步串口、1個(gè)增強(qiáng)型 CAN總線接口、1個(gè)McBSP同步串口;16通道的12位A/D轉(zhuǎn)換器;56個(gè)獨(dú)立可編程、復(fù)用型、通用I/O口。在實(shí)際應(yīng)用中,由于TMS320F2812沒有I2C接口,所以與磁阻傳感器和加速度模塊接口采用的是模擬I2C的形式。
3.3 方向控制系統(tǒng)設(shè)計(jì)
依照實(shí)時(shí)方向隨動(dòng)系統(tǒng)的測(cè)量原理,將磁阻傳感器A安裝在輪椅底座上,這時(shí)我們認(rèn)為磁阻傳感器A是水平放置的。磁阻傳感器B和加速度傳感器相對(duì)固定后,被安裝在輪椅乘坐者所戴的頭盔上,以測(cè)量人臉偏轉(zhuǎn)角度。如果磁阻傳感器A的方向始終都是輪椅正前方,則它在水平面上是變化的。當(dāng)磁阻傳感器B與輪椅正前方成30°時(shí),輪椅需要移動(dòng)30°,基準(zhǔn)方向就是此時(shí)的輪椅正前角度。
本系統(tǒng)軟件是在DSP集成開發(fā)環(huán)境CCS3.3上開發(fā)的。該集成開發(fā)環(huán)境集程序的編輯、編譯、鏈接、調(diào)試以及仿真等功能于一體,具有友好的交互界面,使得用戶的編程、調(diào)試工作更加方便且高效。實(shí)時(shí)方向隨動(dòng)過程是一個(gè)閉環(huán)過程,并按一定流程加以實(shí)現(xiàn)。智能輪椅的方向隨動(dòng)程序流程如圖5所示。
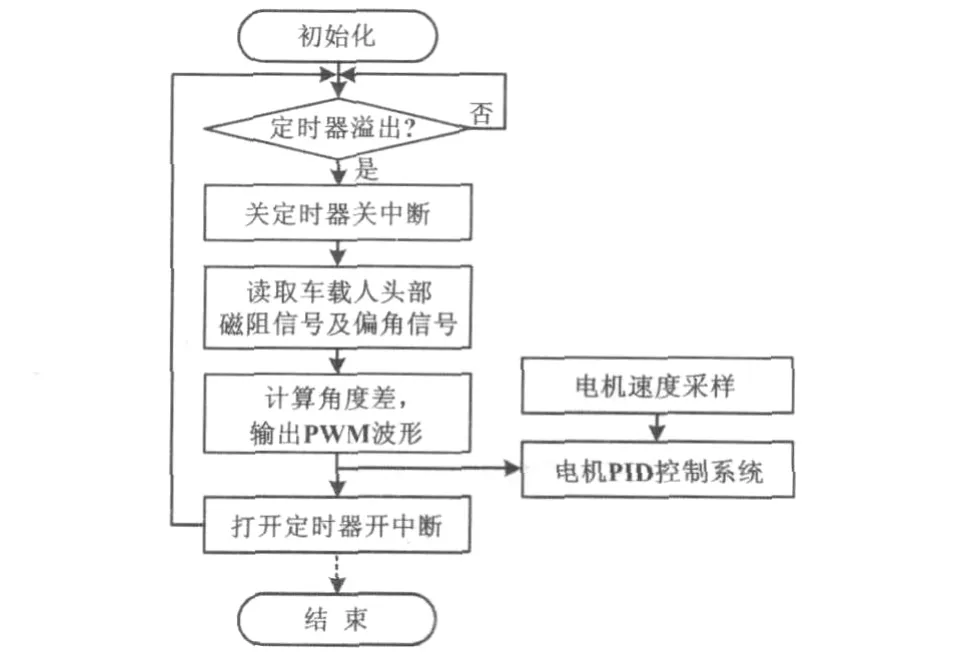
圖5 方向隨動(dòng)程序流程圖Fig.5 Flowchart of the dynamic direction program
通過該程序,計(jì)算人頭部的磁阻傳感器和輪椅上的磁阻傳感器之間的水平角度差,即輪椅轉(zhuǎn)向角,從而產(chǎn)生不同的PWM控制信號(hào),以驅(qū)動(dòng)電機(jī)運(yùn)轉(zhuǎn),進(jìn)而驅(qū)動(dòng)輪椅轉(zhuǎn)向。精度控制采用了閉環(huán)PID控制系統(tǒng),閉環(huán)系統(tǒng)中采用霍爾開關(guān),采集電機(jī)的轉(zhuǎn)速并反饋回DSP芯片。
電機(jī)的控制采用了兩路電機(jī)雙PWM控制。電機(jī)的驅(qū)動(dòng)芯片為L(zhǎng)298芯片。L298內(nèi)部集成了橋式驅(qū)動(dòng)電路,橋電壓可達(dá)48 V。本系統(tǒng)采用了24 V供電。采用兩路電機(jī)雙PWM控制的優(yōu)點(diǎn)在于可以使輪椅的運(yùn)動(dòng)更加靈活。
3.4 測(cè)試數(shù)據(jù)及其誤差分析
在測(cè)試分析數(shù)據(jù)時(shí),以室外環(huán)境為測(cè)量環(huán)境,選擇多個(gè)不同的地點(diǎn)進(jìn)行測(cè)試。方向精度的測(cè)量在0°~360°之間進(jìn)行。測(cè)量時(shí),兩組測(cè)量數(shù)據(jù)之間的系統(tǒng)響應(yīng)時(shí)間在1 s以內(nèi),將其期望方向角差值(輪椅轉(zhuǎn)動(dòng)的實(shí)際方向角)與實(shí)際測(cè)量方向角差值(α=αB-αA)一并列表記錄,并加以比較分析。
實(shí)測(cè)數(shù)據(jù)如表1所示。
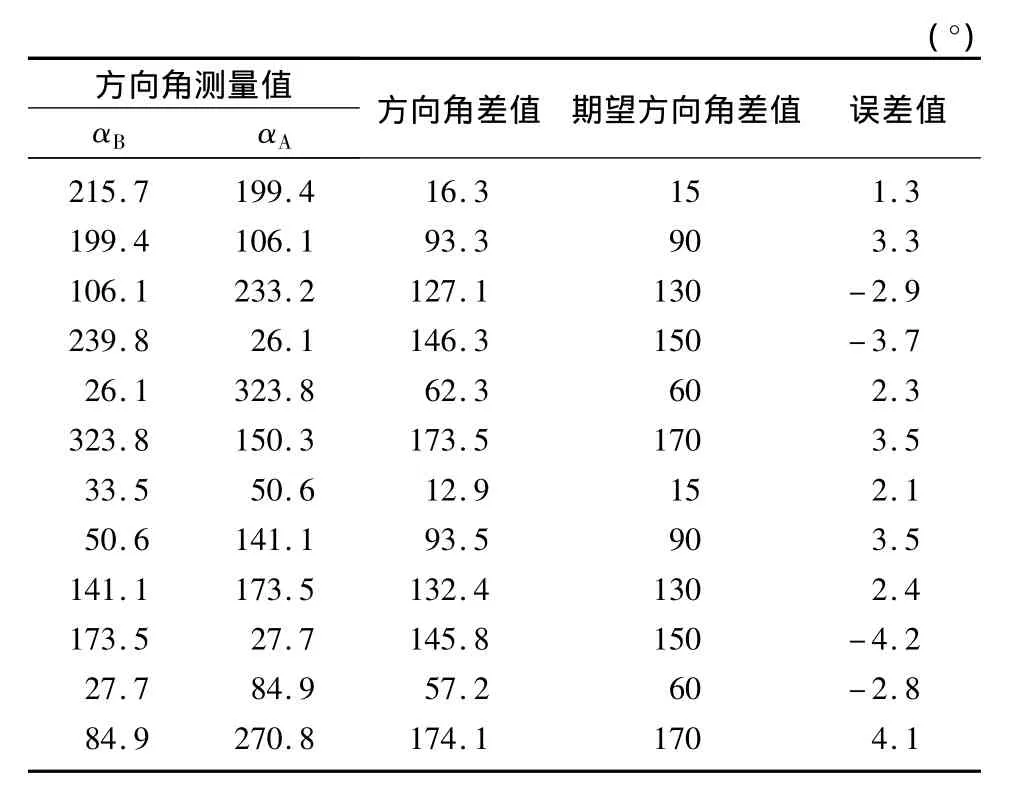
表1 實(shí)測(cè)數(shù)據(jù)表Tab.1 The practical measured data
從表1可以看出,即使在短時(shí)大轉(zhuǎn)向的情況下,轉(zhuǎn)向控制誤差也沒有超過±5°。由表1測(cè)得的數(shù)據(jù)可以計(jì)算出轉(zhuǎn)向控制誤差的平均值為3.0°,無論是最大誤差還是平均誤差均能夠滿足智能輪椅方向控制的工作精度要求。實(shí)時(shí)方向的測(cè)量數(shù)據(jù)受到諸多因素的影響,試驗(yàn)數(shù)據(jù)難免存在系統(tǒng)誤差。試驗(yàn)中系統(tǒng)誤差的來源主要有以下兩個(gè)方面。
①傳感器本身誤差:磁阻傳感器三軸的靈敏度不一致引起的靈敏度誤差、三軸磁阻傳感器在制造時(shí)不能保證正交而產(chǎn)生的正交誤差、傳感器的零點(diǎn)不為零時(shí)所引起的零位誤差。
②測(cè)量環(huán)境誤差:測(cè)量環(huán)境誤差是磁阻傳感器受周圍的鐵磁材料影響引起的誤差,這個(gè)誤差是比較明顯的,也是不容易消除的。鐵磁材料的影響分為硬鐵影響和軟鐵影響兩類。硬鐵影響源于永久磁鐵和磁化的鋼鐵對(duì)磁場(chǎng)引起的變化,如電動(dòng)機(jī)、電源、手機(jī)等,這種影響對(duì)磁場(chǎng)分量來說是恒定的。軟鐵影響產(chǎn)生于地磁場(chǎng),這類影響往往都比較微弱[9]。
4 結(jié)束語
本文設(shè)計(jì)的磁阻傳感器實(shí)時(shí)方向隨動(dòng)系統(tǒng)具有體積小、成本低、抗干擾能力強(qiáng)、可靠性高以及易于安裝到移動(dòng)載體上等特點(diǎn)。通過分析智能輪椅上的應(yīng)用實(shí)例可知,本系統(tǒng)能夠滿足對(duì)運(yùn)動(dòng)載體進(jìn)行實(shí)時(shí)方向識(shí)別的要求,適合應(yīng)用于車載設(shè)備、機(jī)器人、醫(yī)療器械中的方向控制等領(lǐng)域。在實(shí)際應(yīng)用中,測(cè)量數(shù)據(jù)的分析處理十分關(guān)鍵,一個(gè)好的數(shù)據(jù)處理算法可達(dá)到事半功倍的效果。此外,將本方向隨動(dòng)系統(tǒng)與其他方向識(shí)別系統(tǒng)相結(jié)合,形成冗余性互補(bǔ),可構(gòu)建更可靠、性能更穩(wěn)定的實(shí)時(shí)方向隨動(dòng)系統(tǒng)。
[1]王君,羅冰.基于磁阻傳感器的帶傾斜補(bǔ)償?shù)碾娮恿_盤的研制[J].河南大學(xué)學(xué)報(bào):自然科學(xué)版,2009,39(3):244 -245.
[2]侯宏錄,王賽,張雄星,等.基于磁阻傳感器的彈體姿態(tài)測(cè)量系統(tǒng)[J].兵工自動(dòng)化,2010,29(3):75 -76.
[3]鮑松堂.磁阻傳感器及其在飛行體姿態(tài)測(cè)試中的應(yīng)用[J].五邑大學(xué)學(xué)報(bào):自然科學(xué)版,2010,24(2):52 -54.
[4]潘霓,駱樂,聞?dòng)?基于磁阻傳感器的車輛檢測(cè)算法綜述[J].計(jì)算機(jī)工程與應(yīng)用,2009,45(19):245 -246.
[5]孫寧.利用磁阻傳感器測(cè)量飛行體滾轉(zhuǎn)角[D].南京:南京理工大學(xué),2008.
[6]蔣學(xué)斌.基于 DSP的磁阻傳感器導(dǎo)航儀設(shè)計(jì)[J].測(cè)控技術(shù),2010,29(7):9 -11.
[7]趙燦先,陳云飛,楊決寬,等.基于加速度傳感器和磁阻傳感器的空間三維角測(cè)量?jī)x的設(shè)計(jì)設(shè)[J].智能控制技術(shù),2007,36(23):71-72.
[8]郭家玉,倪化生,孔德義,等.3-D磁傳感器的電路設(shè)計(jì)與信號(hào)處理[J].自動(dòng)化與儀表,2008,44(12):5 -8.
[9]吳疆,孫凌玉.車用磁阻傳感器式電子羅盤系統(tǒng)的開發(fā)[J].自動(dòng)控制與測(cè)試測(cè)量,2006(2):98-99.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
計(jì)算機(jī)應(yīng)用(2022年2期)2022-03-01 12:33:42
計(jì)算機(jī)應(yīng)用(2021年4期)2021-04-20 14:06:36
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
計(jì)算機(jī)應(yīng)用(2021年1期)2021-01-21 03:22:38
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
