美國海軍航母及編隊導航系統分析
2012-12-02 06:07:04郭隆華
艦船科學技術 2012年8期
關鍵詞:系統
宿 勇,郭隆華
(1.中國人民解放軍海軍裝備部,北京100071;2.中國船舶重工集團公司 第七一四研究所,北京100192)
0 引 言
導航系統在航母及編隊航行與作戰過程中起到非常重要的作用,主要是保證航母及編隊的安全航行、確保飛機的安全起降、對準艦載飛機慣性導航系統,并作為艦載情報信息系統與武器系統的基準信息源。美國海軍航母和編隊其他主戰艦艇的導航系統組成基本相同,是以慣性導航系統(INS)為主,衛星導航系統(GPS)、多普勒計程儀、回聲測深儀及電磁計程儀等導航系統為輔的組合導航系統。這些導航信息源通過導航傳感器系統接口(NAVSSI)進行綜合與處理,獲取最優的、統一的導航信息,并將導航數據發送到各武器作戰支持、指揮控制、計算機、通信、情報、監視、偵察系統和其他信息系統。航母與編隊其他主戰艦艇導航系統相比,NAVSSI 將導航數據傳輸給不同的用戶,航母上的NAVSSI 需要將導航信息發送給艦載機起降的相關輔助系統。
1 導航傳感器系統接口
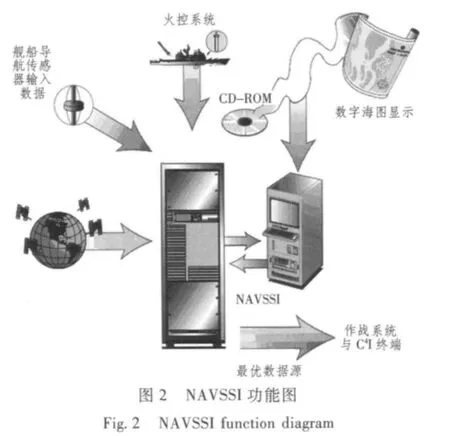
NAVSSI 是航母及編隊導航系統的核心,其能綜合來自各種導航傳感器的數據,形成精確的導航數據、時間數據等,分發給航母及編隊艦艇的作戰指揮系統、探測系統、航空保障系統、航行保障系統、通信系統、武器系統及訓練系統等。
NAVSSI 的主要功能和特征如下:
1)集成了包括GPS 和慣性導航的多種導航信息源;
2)能在干擾嚴重的環境中保持高精度;
3)提供一種通常可參考艦船導航方案;
4)提供超過99.9%的作戰有效性;
5)利用民用現成技術(COTS)降低系統成本;
6)支持海軍無紙化導航;
7)提供比GPS 更精確和可靠的性能;
8)適應國防信息基礎設施通用作戰環境(DII COE);
9)滿足全球海上指揮與控制系統(GCCS-M)標準;
10)使用部門聯合開發的指揮顯示與控制——慣性導航系統(COMDAC-INS)軟件部分;
11)使用國家圖像與測繪局(NIMA)的數據;
12)滿足軟件工程機構性能成熟度模型標準;
13)提供慣性、衛星、多普勒聲吶組合導航的最優濾波,確定最佳位置。
1.1 發展歷程
NAVSSI 是1991年2月由美國空海作戰系統司令部著手實施的,是為了處理戰斗群之間各種導航數據,形成統一的導航數據發送。由于民用電子海圖與信息系統(ECDIS)的飛速發展,1998年,美國海軍決定將電子海圖與信息系統應用于海軍。NAVSSI 不僅包括了海軍電子海圖顯示與信息系統(ECDIS-N)的功能,還增加了許多防御任務功能。
到目前為止,NAVSSI 已經從Block 0 發展到Block 4,經過了5 個發展階段。Block 4.2.1 是最新的版本。NAVSSI 的設計在操作方法上非常靈活,可對輸出數據進行選擇,對慣性導航系統重調用定位源進行選擇,可對數據合理性進行監視選擇等。NAVSSI 系統采用開放式設計,可適應技術的不斷發展,植入新的技術。未來,美國海軍計劃開發GPS定位、導航與授時系統(G-PNTS),來取代NAVSSI系統,G-PNTS 與NAVSSI 的內部都嵌入了下一代卡式GPS 接收機,確保美國海軍艦船能接收來自改進型GPS 衛星的信號。
1.2 系統構成
NAVSSI Block 4 系統主要由實時子系統(RTS)、顯示控制子系統(DCS)及遠程工作站(NRS)3 個部分組成。
實時子系統負責收集、處理及分發定位、導航、授時(PNT)數據,采用1 套導航數據源綜合(NSI)算法將多個傳感器的數據融合,包括GPS 數據和慣性導航數據,來形成高精度和有效的導航方案。所有NAVSSI Block 4 系統都包括2 套實時子系統,這2 套實時子系統通過反射內存(即多臺計算機形成全局共享內存互聯的高速網絡,每個節點都把全局內存視為本地內存)進行數據交換,每套實時子系統可以共享所有的源數據。如果1 條通信信道對實時子系統失效,實時子系統還可以通過反射內存從其他實時子系統獲取信息。
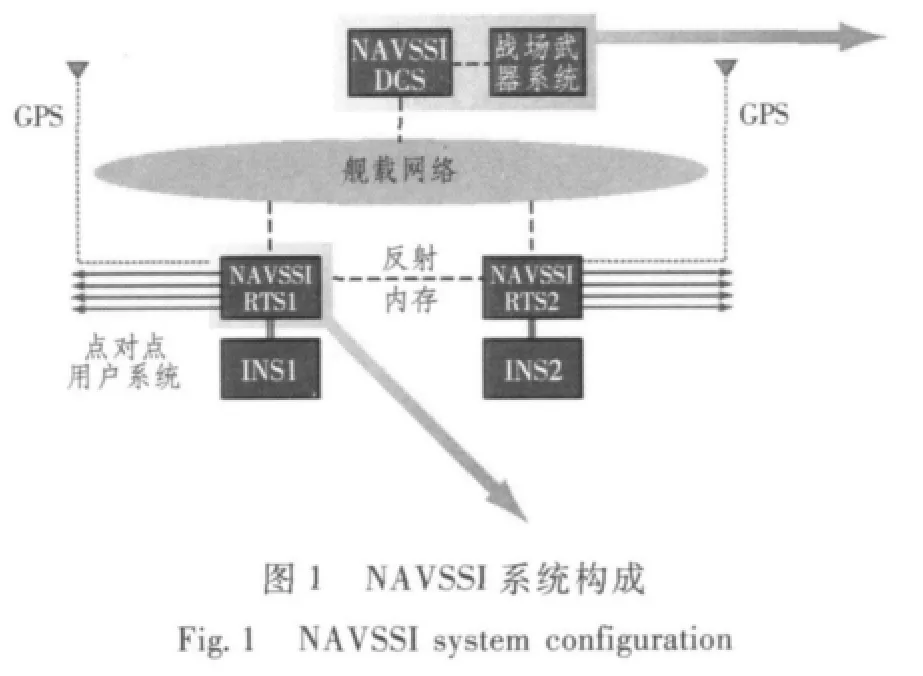
顯示控制子系統通過局域網與每套實時子系統進行通信。顯示控制子系統為實時子系統提供操作人員接口以及電子海圖和雷達接口。顯示控制子系統能利用導航工具包顯示實時子系統的傳感器信息,計程儀導航數據,電子海圖及雷達圖像,并能控制實時子系統。
遠程工作站是NAVSSI 操作人員的遠程顯示器。NAVSSI 遠程工作站為艦橋及其他艙室的人員提供全部的控制與顯示能力。操作過程中,NAVSSI 持續監視各種導航數據源的輸入數據,確保數據的完整性。
1.3 主要功能
NAVSSI 的功能主要包括定位、導航、授時、艦載機慣性導航系統對準等。
1)定位
美國海軍艦船采用了多個參考基點,如武器系統、雷達、慣性導航系統、平臺羅經、GPS、艦橋。在大型艦船上,由于船體變形和使用的參考系不同,相互之間的差別可達近百米。隨著射擊解算要求越來越精確,對于總的誤差估計,這些誤差就變得更加重要。建立統一的基準位置數據已成為迫切解決的問題。該方案將在艦船上挑選一個獨立的點,作為所有艦載系統的參考點,即本艦參考點(OSRP)。這簡化了本艦參考點定位、導航與授時數據與其他終端用戶之間的轉換。通常情況下,本艦參考點應與位于艦船中心線中部的水線位置的艦船自轉中心重合。
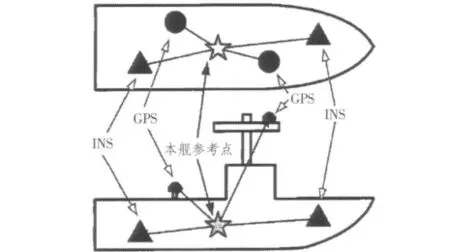
圖3 本艦參考點桿臂向量Fig.3 Own ships reference point(OSRP)lever arms
2)導航
NAVSSI 的主要功能是向艦船武器與作戰系統提供位置與時間信息,其次是向艦船艦橋提供導航方案,即將艦船的位置數據標繪在艦橋、海圖室及其他艦上操控場所的電子海圖上,可與綜合艦橋進行組合,實現避碰、航行計劃和艦船操縱自動化。為了在任何情況下向用戶提供有效的導航數據,NAVSSI 采用優先級的方式進行導航數據源選擇。數據源選擇方案考慮了所有可提供導航數據的傳感器,并為每個傳感器設置了優先級,包括位置、速度、加速度、航向、姿態、深度、風速等。如果任何傳感器未通過數據審查,傳輸了無效數據,或傳輸失敗,NAVSSI 自動地采用傳感器可提供的下一批次的數據。
3)授時
為了完全共享作戰航跡數據,以時間為標簽的數據的時間誤差必須足夠小。GPS 可以在全球提供可靠的、精確的供導航系統使用的無故障時間信息。但是,GPS 戰時有可能受到干擾,無法滿足導航小組對可靠的精確時間的需求。因此,NAVSSI 開發了一種精確授時裝置(PTU)。
精確授時裝置包括頻率調整模塊(FDM)、銣振蕩器以及緩沖輸出設備。一旦估計的時間誤差(ETE)超過100 ns,精確授時裝置將進入工作模式,并利用銣振蕩器來保持時間精度。對于大多數用戶,1 ms 的精度能滿足需求。這意味著精確授時裝置能在GPS 無法使用的情況下,在5 個半月的時間里滿足這些用戶的時間需求。
4)艦載機慣性導航系統對準
航母艦載機慣性導航系統對準是航母導航系統的重要功能。艦載機慣性導航系統在飛機起飛前需要進行對準,也即利用航母導航系統的姿態和位置進行初始化的過程。艦載機慣性導航系統的對準主要利用慣性導航系統的數據,最初采用硬連接系統,艦船慣性導航系統的數據經艦載機慣性系統對準控制臺(SAISAC),到甲板出口箱,再經轉換箱到相對速度計算機箱,最后到飛機慣性導航系統。引入NAVSSI 以后,由于NAVSSI 能獲得GPS 數據,實現了數字化,可以利用LINK-4A 數據鏈方便地實現對準。其中,LINK-4A 數據鏈為單向或雙向通信系統,可向100 架飛機發送信息。
2 美國航母及編隊導航系統的數據流程
航母及編隊導航系統的數據流程主要包括接收數據源數據、數據檢查、數據處理、導航數據輸出等。
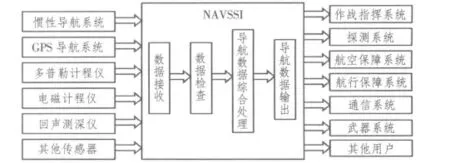
圖4 NAVSSI 數據流程圖Fig.4 NAVSSI data flow chart
2.1 導航系統主要數據源
美國航母及編隊中NAVSSI 的數據源主要包括慣性導航系統、多普勒計程儀、衛星導航系統、回聲測深儀、電磁計程儀、陀螺羅經、風速儀及時間數據等。
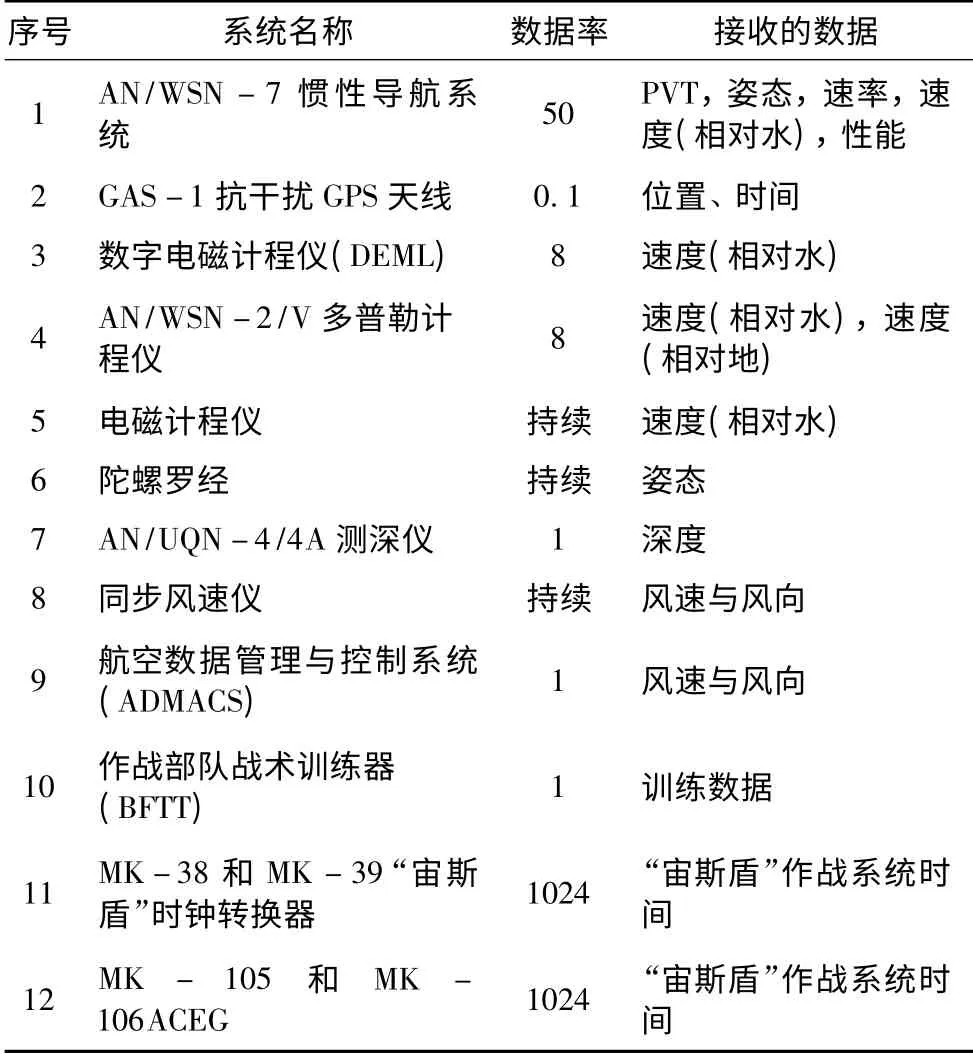
表1 NAVSSI 的主要數據源Tab.1 NAVSSI main data source
2.2 數據檢查
NAVSSI 持續監視導航數據源的輸入數據,并確保數據的完整性。完整性檢查主要是確保通過物理介質連接NAVSSI 數據源,并接收合適的數據。如果出現不完整信息、信息中含錯誤內容等情況,NAVSSI 將向操作人員發出可視的報警信號。
NAVSSI 能提供導航數據有效性監控,包括對每個位置數據源誤差特性的持續監控。如果數據源誤差特性持續超過一定數值,該數據源即認為是無效的。數據源綜合算法將不采用該數據,NAVSSI 向操作人員發出可視的報警信號。如果NAVSSI 操作人員手動選擇了一個超出誤差范圍的數據源,NAVSSI也將顯示報警信息。
2.3 導航數據綜合處理
NAVSSI 提供一種導航數據源綜合算法,該算法將來自GPS 的數據與慣性導航系統數據綜合,形成一種高精度、可靠的導航方案。導航數據源綜合算法充分考慮了每個導航傳感器的誤差特性,將滿足表1 中艦上用戶的精度需求。
位置數據。主要是利用來自1 臺或2 臺GPS 接收機和1 套或2 套慣性導航系統的位置數據綜合計算得出。該綜合位置數據利用最優的慣性導航系統數據以插值的方式推算得出。該方法能為用戶提供精確的位置信息。當GPS 不可用時,NAVSSI 的精度與慣性導航系統精度相同。其中,最優的慣性導航系統是指一段時間內輸出的位置信息最接近GPS 位置信息的慣性導航系統。數據源位置綜合算法使NAVSSI 在正常工作的情況下提供精度為12 m 的位置參考信息。
速度數據。通過對最優慣性導航系統與GPS 之間的速度誤差進行濾波來計算速度值。慣性導航系統速度經過估計的誤差校正后用于導航數據源綜合計算。
姿態數據。姿態與姿態變化率不需要計算,直接采用最優慣性導航系統的數據。如果慣性導航系統失效,姿態數據就是無效的。當實時子系統接收到新的姿態數據時,將對新接收的數據進行多項式匹配。這種匹配將用于推算姿態數據并根據最新的慣性導航系統姿態數據時間點計算姿態變化率信息。利用這種匹配方式及外推算法,NAVSSI 能保證姿態數據的精度。
導航數據源綜合算法能估計出NAVSSI 輸出的數據的精度。該精度估計基于傳感器系統已知的誤差特性。某些用戶系統將精度估計數據作為數據信息的一部分進行發送。對于其他用戶,這些精度估計數據將用于設定數據的有效位數。
2.4 導航數據輸出
NAVSSI 的實時子系統以多種形式輸出導航與時間數據,接收NAVSSI 導航數據的艦載用戶有數十個。表2 給出了NAVSSI 實時子系統輸出導航數據的主要接收用戶及精度需求,這些數據包括了航母及編隊其他主戰水面艦艇上的主要系統用戶。
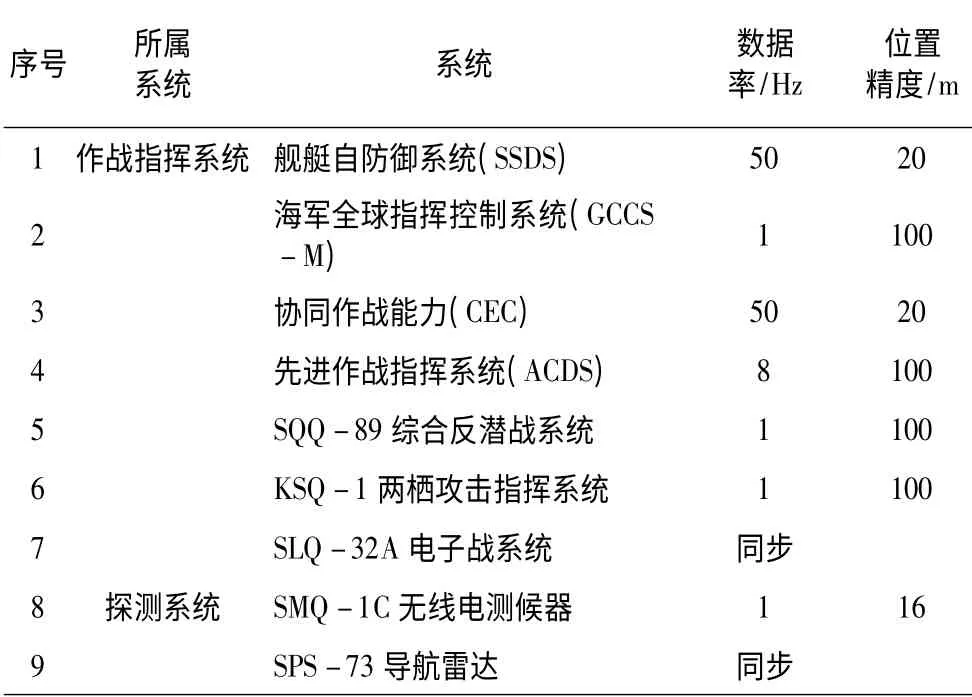
表2 NAVSSI Block 4 輸出的主要導航數據Tab.2 NAVSSI Block 4′s main output navigation data
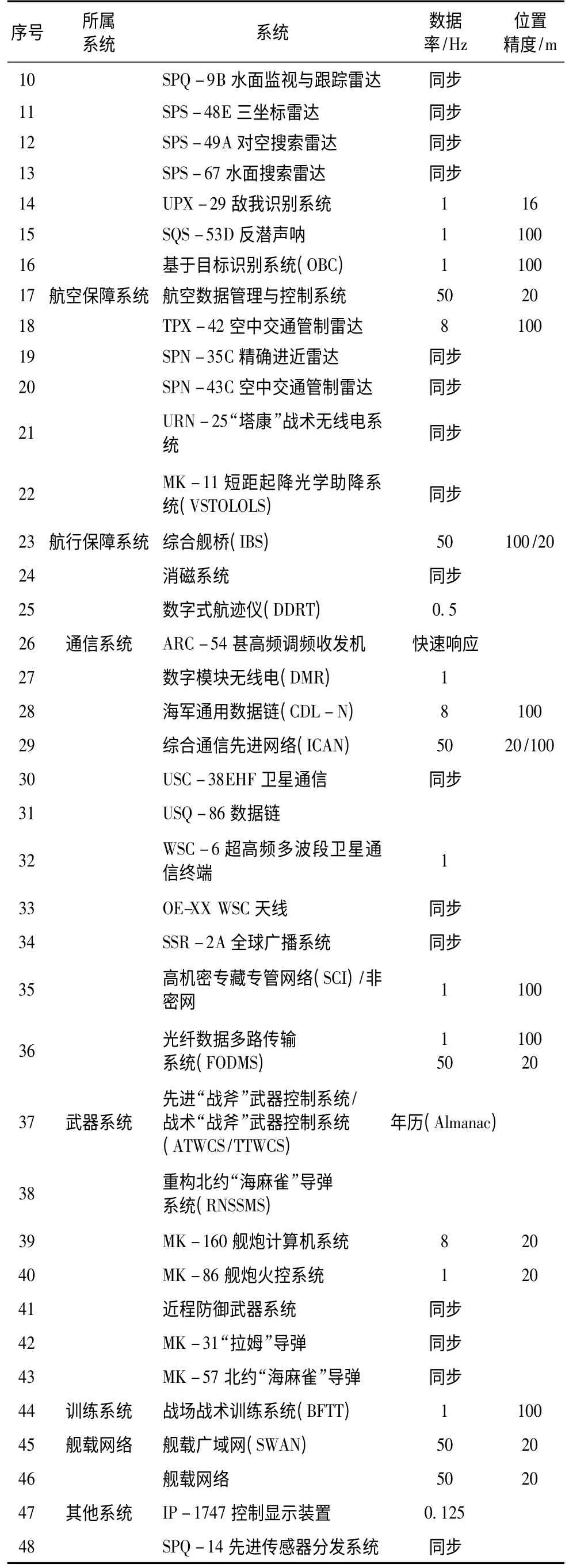
(續表1)
3 美國航母及編隊導航系統的信息安全
最初,NAVSSI 是一套獨立的系統,其子系統通過內部局域網連接,實時子系統通過外部點對點接口與傳感器及用戶連接。這種獨立的配置不存在信息安全問題,但是隨著接口數量的增長,將與其他網絡用戶交叉,因此需要考慮信息安全問題。以美國LPD-17 級兩棲攻擊艦為例,當其NAVSSI 需要通過衛星通信與外界聯系時就出現了信息安全問題,另外同時與非密網與涉密網連接也將產生跨界信息安全問題。
1)通過衛星通信與外界聯系
LPD-17 的非密艦載廣域網(SWAN)通過衛星通信與非密互聯網路由器網絡(NIPRNET)連接,非密互聯網路由器網絡通過邊界安全方法進行安全防護。然而,這些措施并非100%安全,因此當非密的艦載廣域網出現漏洞時,NAVSSI 需要受到安全保護。NAVSSI 安全方案包括軟件與硬件方案。
定位、導航與授時數據如果出現延遲將是無意義的,因此不需要轉發任何損壞的或錯誤的數據,也不需要進行雙向通信。這將使NAVSSI 向非密艦船廣域網單向多點傳輸數據,而不需要接收任何數據。通過硬件實現利用絕對安全的單向光纖輸出數據,這種軟件方案將變得更加安全。這種軟件與硬件的組合方案確保NAVSSI 能防止任何來自非密艦船廣域網的訪問。
2)跨界通信問題
LPD-17 需要NAVSSI 向涉密的艦船廣域網提供導航信息。類似的單向光纖方案也用于這種接口方案,這能確保涉密數據不會進入NAVSSI。然而,NAVSSI 作為非密系統將向秘密的艦載廣域網提供定位、導航與授時數據,這將產生非計劃的跨界傳輸問題。美國海軍允許非密的定位、導航與授時數據提供給涉密系統,此外還可以進行物理連接。
涉密的艦船廣域網的風險可能來自與NAVSSI連接的非密系統。如果該非密系統能通過單向通信路徑訪問秘密的艦船廣域網,就可能植入“特洛伊木馬”病毒或其他類型的惡意代碼。為防止任何產生途經NAVSSI 的跨界通道的可能,涉密艦船廣域網的接口直接與實時子系統連接,實時子系統不提供任何轉移、傳輸數據的權限,以及對其他接口產生數據通道的權限。實時子系統包括一種獨立的可執行程序,嵌入子系統硬件中,無法進行修改,或運行其他程序。實時子系統沒有外圍存儲設備和分配內存權限,所以無法存儲任何植入的數據,也不存在有效的接口信息。這確保了任何數據無法從一個接口傳輸到另一接口。所有輸入到實時子系統的數據以固定的格式進行處理。這種數據隨后用于以適當的輸出格式構建新的輸出數據,這也消除了數據從一個接口轉移到另一個接口,從而產生跨界通信信道的可能性。
4 結 語
NAVSSI 是目前美國海軍水面艦艇廣泛采用的定位、導航與授時方案,能解決大型水面艦艇多個位置的桿臂效應問題、GPS 信號受到干擾時的授時問題等。NAVSSI 方案將航母編隊內的定位、導航與授時數據完全統一,是航母編隊進行航行與作戰的重要保障。
[1]MURPHY S P.An integrated approach to US navy Shipboard Navigation[J].IEEE,2004.
[2]SHAW P T.An integrated approach to electronic navigation[J].IEEE,2000.
[3]SHAW P T,et al.Integrated and distributed position navigation and timing (PNT ) data in shipboard environments[J].IEEE,2004.
[4]PETTUS W R,et al.Formulating an improved integrated navigation solution for US navy surface ships[J].IEEE,1998.
[5]Space and Naval Warfare Systems Center.Navigation sensor system interface,integrated navigation[R].AD report,1998.
[6]CAPT D G.US navy progress in electronic navigation[J].IEEE,2002.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32