TCSC次同步諧振阻尼控制器設(shè)計
2012-12-05 03:24:00康積濤盧紹強
四川電力技術(shù) 2012年3期
王 敏,康積濤,李 康,盧紹強
(西南交通大學(xué)電氣工程學(xué)院,四川成都 610031)
輸電線路中引入串聯(lián)電容補償,在增加輸電經(jīng)濟效益的同時會引起電力系統(tǒng)的穩(wěn)定運行問題。當(dāng)采用了串補的輸電系統(tǒng)中的汽輪發(fā)電機組受到擾動時,就會因網(wǎng)機耦合而彼此互激,發(fā)生次同步諧振(subsynchronous resonance,SSR),導(dǎo)致發(fā)電機軸系扭振,嚴重時造成發(fā)電機軸系損壞,破壞電力系統(tǒng)的安全穩(wěn)定運行。
國內(nèi)外對次同步諧振的抑制措施進行了廣泛而深入的研究,TCSC、SVC等FACTS裝置在次同步諧振的抑制研究上也受到了充分的重視。在研究使用TCSC抑制次同步諧振方面,國內(nèi)外學(xué)者已經(jīng)進行了大量的研究[1-3]。文獻[4]的計算表明,TCSC 在一定的導(dǎo)通角下,具有正電阻特性,從而可以緩解次同步諧振;文獻[5]提出了TCSC主動阻尼控制,通過對TCSC的觸發(fā)調(diào)制,提升系統(tǒng)電氣阻尼來抑制危險模式的振蕩。文獻[6]基于TCSC設(shè)計了一寬帶通單通道SSDC,實現(xiàn)了將整個次同步頻率范圍的電氣阻尼提升為正。
基于提升系統(tǒng)電氣阻尼的思想,在TCSC開環(huán)控制上附加次同步阻尼控制器。該控制器針對分模態(tài)控制方式的不足進行了改進。基于IEEE SSR第一標(biāo)準測試模型[7]在 PSCAD/EMTDC 中使用測試信號法[8],分析了該控制器對系統(tǒng)電氣阻尼的影響。結(jié)果表明,加入該SSDC能將系統(tǒng)在幾乎整個次同步頻段內(nèi)的電氣阻尼提高為正,即消除了該頻段內(nèi)的SSR危險。
1 TCSC抑制SSR的基本原理
1.1 TCSC 運行原理
TCSC的基本結(jié)構(gòu)如圖1所示,由一個電容器和一個晶閘管控制電抗器(TCR)組成。
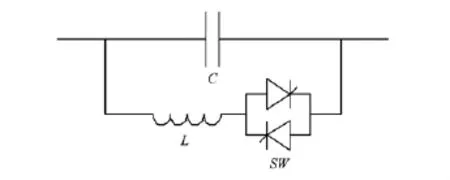
圖1 TCSC基本模塊
穩(wěn)態(tài)運行時,TCSC的等效基波電抗XTCSC與觸發(fā)角α的關(guān)系為
式中,XC為電容器C的基波電抗;XL為α=90°時TCR的等效基波電抗;k為TCSC主回路特征參數(shù),一般k2=3.3~10,以使觸發(fā)角α變化時,TCSC只出現(xiàn)一個諧振點。
將TCSC電抗XTCSC以XC為基值進行標(biāo)幺化,記Xnet=XTCSC/XC。
1.2 TCSC抑制SSR
由復(fù)轉(zhuǎn)矩系數(shù)法可知,在軸系的某一自然扭振頻率附近,若機械子系統(tǒng)所具有的正阻尼不足以抵消電氣子系統(tǒng)所產(chǎn)生的負阻尼,導(dǎo)致系統(tǒng)對該諧振頻率的總阻尼系數(shù)小于0,則系統(tǒng)將會產(chǎn)生不穩(wěn)定的次同步諧振[9]。這里考慮將機械阻尼設(shè)為0,即考慮機械阻尼最差的情況,這樣在軸系的扭振頻率附近,電氣阻尼為正即可保證系統(tǒng)SSR是穩(wěn)定的。
電氣阻尼定義為[8]

式中,ΔTe為發(fā)電機電磁轉(zhuǎn)矩增量;Δω為發(fā)電機轉(zhuǎn)速偏差。可見,要使電氣系統(tǒng)的阻尼為正,ΔTe與Δω的相位差必須在-90°~90°之間。
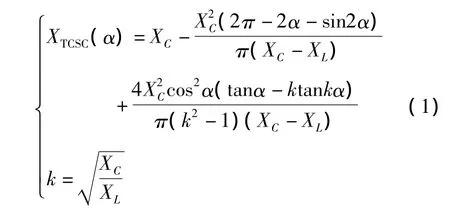
發(fā)電機轉(zhuǎn)速偏差Δω包含了各個振蕩模式分量,因此常選作次同步阻尼控制器的輸入信號。SSDC提升阻尼的原理如圖2所示,其中Δω為發(fā)電機轉(zhuǎn)速偏差;Δα為TCSC觸發(fā)角增量;ΔTeDC為產(chǎn)生的發(fā)電機電磁轉(zhuǎn)矩增量;C(s)為SSDC的傳遞函數(shù),G(s)為TCSC觸發(fā)角增量到ΔTeDC的傳遞函數(shù)。
圖2 加入SSDC提升阻尼的原理
添加SSDC后增加的電氣阻尼為[10]

設(shè)計SSDC基本目標(biāo)就是通過恰當(dāng)選擇C(s)的參數(shù),使得模態(tài)頻率附近,ΔTeDC與 Δω 的 相 位 差 在-90°~90°之間,最終實現(xiàn)將系統(tǒng)電氣阻尼提升為正。
2 系統(tǒng)模型
測試模型是基于IEEE第一標(biāo)準測試系統(tǒng),并將原系統(tǒng)中部分固定電容用可控串補代替,線路的總串補度為60%,TCSC電抗為線路總電抗的20%,安裝在線路末端,如圖3所示。TCSC的主回路特征參數(shù)k取2.5,穩(wěn)態(tài)觸發(fā)角為157.6°。發(fā)電機軸系采用六軸段模型,即包含5個扭振模式,分別為15.71 Hz、20.21 Hz、25.55 Hz、32.28 Hz、47.45 Hz。系統(tǒng)其他參數(shù)同文獻[7]。
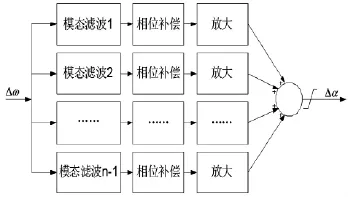
圖3 測試系統(tǒng)模型
3 SSDC設(shè)計
圖3中測試系統(tǒng)具有5個扭振模式,其中模式5由于其模態(tài)阻尼非常大,一般不會發(fā)生網(wǎng)機扭振相互作用,在控制器設(shè)計時不考慮對模式5的影響,只針對前4個模式。
方案1:采用分模態(tài)控制。
采用分模態(tài)控制方式的SSDC如圖4所示,圖中n表示軸段數(shù),記此控制器為SSDC1。針對可能發(fā)生扭振的4個模式,分別進行濾波、相位補償及放大處理,最終疊加、限幅成為控制器的輸出,即TCSC觸發(fā)角的變化。這種控制器最大的優(yōu)點是針對性強,各分量間的影響小[11],缺點是可能削弱其他頻率處的電氣阻尼,引起電網(wǎng)中其他發(fā)電機的軸系扭振。
方案2:改進模態(tài)控制。
分模態(tài)控制僅能改善系統(tǒng)在模態(tài)頻率附近的電氣阻尼。針對SSDC1存在的不足,對其進行改進。設(shè)計的控制器結(jié)構(gòu)如圖5所示,記此控制器為SS-DC2。其結(jié)構(gòu)與SSDC1相同,差別在于濾波環(huán)節(jié)通帶較寬。圖中的k,即為控制器的支路數(shù),與軸段數(shù)n沒有必然的關(guān)系。根據(jù)系統(tǒng)的特點將次同步頻率范圍劃分為數(shù)段,分段補償相位,提升段內(nèi)頻率處的電氣阻尼。各支路阻尼提升效果疊加最終實現(xiàn)將次同步頻率的電氣阻尼提升為正。
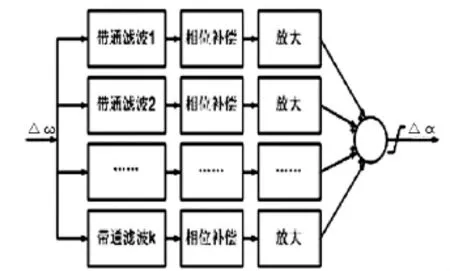
圖4 分模態(tài)控制SSDC的結(jié)構(gòu)
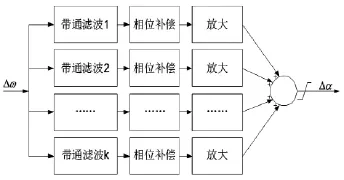
圖5 改進模態(tài)控制SSDC的結(jié)構(gòu)
各支路中相位補償環(huán)節(jié),補償G(s)及帶通濾波引起的相位差。G(s)的相位可通過測試信號法得到[6,10],圖6 給出了 Xnet=1.2、1.25、1.3(觸發(fā)角分別為158.8°,157.6°和 156.6°)時的 G(s)相位曲線,其中發(fā)電機運行狀態(tài)為滿載,功率因數(shù)等于0.9(滯后)。
相位補償環(huán)節(jié)采用形如(1+saT)/(1+sT)的超前(滯后)環(huán)節(jié),當(dāng)a大于1時為超前環(huán)節(jié),小于1為滯后環(huán)節(jié),其計算公式如下。
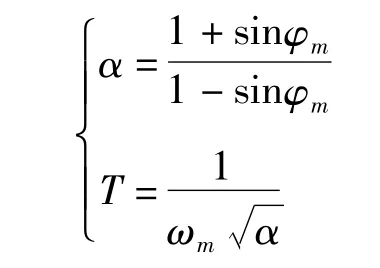
式中,ωm為補償點角頻率;φm為補償點的相角,即最大超前(滯后)角。
SSDC1由于需要相位補償?shù)念l率范圍很窄,其相位補償選擇相對簡單。將各自的補償點分別設(shè)為各模態(tài)頻率點,并選擇合適的補償角度即可。SSDC1參數(shù)見表1。模式4附近頻率由于相位滯后很小,故不設(shè)置相補環(huán)節(jié)。各個模式的濾波及相補環(huán)節(jié)如表1。
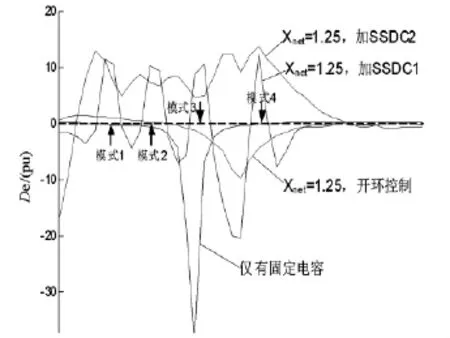
圖6 G(s)的相位特性

表1 SSDC1參數(shù)
針對本系統(tǒng)中發(fā)電機軸系的特點,設(shè)計SSDC2時將次同步頻率分為4段,即SSDC2包含4個支路。各支路分別提升段內(nèi)頻率的電氣阻尼。SSDC2的前3個支路由于G(s)在模式3之前頻率范圍內(nèi)變化緩慢,其設(shè)計思路與SSDC1相同,不再贅述。第4支路在15 Hz處用4個滯后環(huán)節(jié)補償-200°,并用3個超前環(huán)節(jié)在90 Hz處補償135°,以改善該通帶頻率段內(nèi)的負阻尼,使從模式1到模式4的整個頻率段內(nèi)的電氣阻尼都大于0。各個支路的濾波、相補及放大環(huán)節(jié)參數(shù)如表2。

表2 SSDC2參數(shù)
4 仿真分析
4.1 電氣阻尼分析
選擇TCSC 的穩(wěn)態(tài)觸發(fā)角為157.6°,即Xnet=1.25。發(fā)電機運行狀態(tài)為滿載,功率因數(shù)等于0.9(滯后)。為驗證所設(shè)計的SSDC抑制SSR的有效性,考慮以下4種運行工況。
工況1:TCSC不投入,即TCSC等效為固定電容。
工況2:TCSC投入,采用開環(huán)控制。
工況3:TCSC投入,在開環(huán)控制上附加SSDC1。
工況4:TCSC投入,在開環(huán)控制上附加SSDC2。
采用測試信號法分析了4種工況下的電氣阻尼,如圖7所示。可以看到,全部采用固定電容補償時,系統(tǒng)在4個模式附近的電氣阻尼都為負,系統(tǒng)SSR不穩(wěn)定。工況2下,TCSC的投入引起系統(tǒng)諧振頻率的右移,模式1、2附近的電氣阻尼有所增大,但在模式3、4附近的阻尼為負,系統(tǒng)仍為 SSR不穩(wěn)定。工況3,加裝所設(shè)計的SSDC1后,各個模式頻率處的電氣阻尼均為正。而工況4,加裝所設(shè)計的SSDC2后,從13 Hz到40 Hz內(nèi)的電氣阻尼均為正,相對采用分模態(tài)控制思想設(shè)計的SSDC1,阻尼為正的范圍不再局限在模式頻率附近,亦即消除了這一整個頻率段內(nèi)的SSR危險。
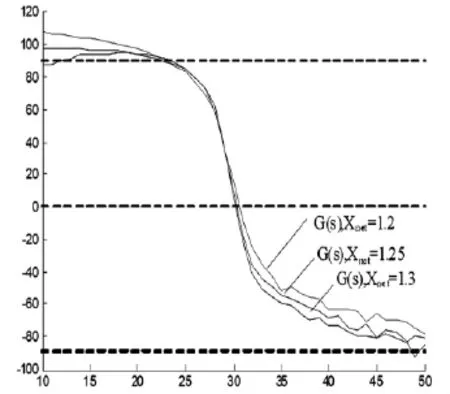
圖7 4種工況下的電氣阻尼曲線
4.2 暫態(tài)時域仿真
為進一步驗證SSDC2抑制SSR的有效性,利用PSCAD/EMTDC對圖3所示系統(tǒng)進行時域仿真。發(fā)電機軸系采用六軸段模型,機械阻尼設(shè)為0。待系統(tǒng)進入穩(wěn)態(tài)后,t=2.5 s時刻,圖3中母線B發(fā)生三相接地短路故障,故障持續(xù)0.05 s后切除。圖8給出了系統(tǒng)在工況4下的各軸段間的扭矩,可以看出在使用了所設(shè)計的SSDC2之后,各軸段間的扭矩逐漸衰減并最終回到原穩(wěn)態(tài),系統(tǒng)SSR穩(wěn)定。
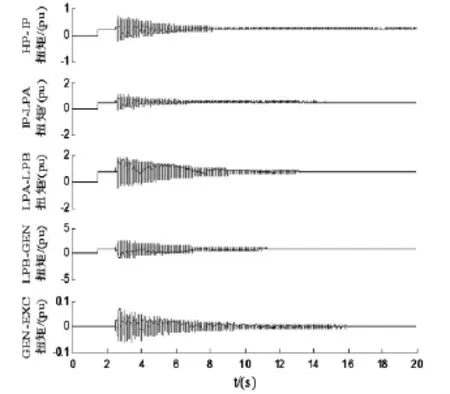
圖8 工況4加SSDC2后發(fā)電機軸段扭矩
5 結(jié)論
基于提升系統(tǒng)電氣阻尼的思想,設(shè)計了TCSC次同步阻尼控制器。該控制器針對分模態(tài)控制方式的不足進行了改進。結(jié)果表明,加入該控制器能將系統(tǒng)在幾乎整個次同步頻段內(nèi)的電氣阻尼提高為正,即消除了該頻段內(nèi)的SSR危險,因而具有很強的工程實用性和通用性。
[1]S.S.Choi,F(xiàn).Jiang,G.Shrestha.Suppression of Transmission System Oscillations by Thyristor-controlled Series Compensation[J].IEE Proc.- Gener.Transm.Distrib.1996,143(1):7 -12.
[2]Brian K.Perkins,M.R.Iravani.Dynamic Modeling of a TCSC with Application to SSR Analysis[J].IEEE Transactions on Power Systems,1997,12(4):1619 -1625.
[3]葛俊,童陸園,耿俊成,等.TCSC抑制次同步諧振的機理研究及其參數(shù)設(shè)計[J].中國電機工程學(xué)報,2002,22(6):25-29.
[4]呂世榮,劉曉鵬,郭強,等.TCSC對抑制次同步諧振的機理分析[J].電力系統(tǒng)自動化,1999,23(6):14-18.
[5]周長春,劉前進,Lennart A..ngquist,等.抑制次同步諧振的TCSC主動阻尼控制[J].中國電機工程學(xué)報,2008,28(10):130 -135.
[6]鄭翔,徐政,張靜.TCSC次同步諧振附加阻尼控制器[J].電工技術(shù)學(xué)報,2011,26(2):181 -186.
[7]IEEE Subsynchronous Resonance Working Group.First Benchmark Model for Computer Simulation of Subsynchronous Resonance[J].IEEE Transactions on Power ApparatusandSystems,1977,96(5):1565 -1572.
[8]徐政.復(fù)轉(zhuǎn)矩系數(shù)法的適用性分析及其時域仿真實現(xiàn)[J].中國電機工程學(xué)報,2000,20(6):1-4.
[9]程時杰,曹一家,江全元.電力系統(tǒng)次同步振蕩的理論與方法[M].北京:科學(xué)出版社,2009.
[10]張靜,徐政,鄭翔,等.SVC抑制SSR的機理及控制器設(shè)計[J].南方電網(wǎng)技術(shù),2010,4(3):57-61.
[11]張丹.高壓直流輸電系統(tǒng)次同步振蕩的特征值分析與控制[D].北京:華北電力大學(xué),2011.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
大電機技術(shù)(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
湖北經(jīng)濟學(xué)院學(xué)報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學(xué)院學(xué)報(2015年4期)2015-02-28 14:30:00
電力工程技術(shù)(2014年1期)2014-03-20 14:19:06
計算物理(2014年2期)2014-03-11 17:01:39