一種小型數字化光泵測磁系統的設計*
2012-12-22 06:02:06張志通
電子器件 2012年6期
李 輝 ,胡 輝,張志通
(1.安徽師范大學物理與電子信息學院,安徽 蕪湖241000;2.北華航天工業學院電子系,河北 廊坊065000)
隨著我國經濟的高速發展,對鐵礦石等資源的需求急速增長,因此大規模的國土資源普查勢在必行,這就對各種物探儀器的研制和改進提供了廣闊的市場前景。磁測法是利用精確測量地球磁場來獲得找礦信息,是一種常用的物探方法。質子旋進式磁力儀結構簡單,價格便宜,但是功耗大,精度相對于找礦的要求也顯得不足。超導磁力儀精度很高,但是需要液氮冷卻,儲存運輸很不方便,尤其不適合航空磁測。光泵磁力儀是利用光泵作用和核磁共振技術制成的磁測儀器,具有精度高(至少0.1nT)、無零點漂移、可連續測量等優點,現在已經廣泛應用在航空磁測、海洋磁測以及生物磁學等領域[1]。
目前光泵磁力儀對磁場的測量都是通過對拉莫爾頻率的跟蹤鎖定來實現[2]。本文設計了完整的測磁系統,包括前端跟蹤鎖定環路,以及后端測頻、存儲與顯示系統;分析了各個模塊的工作原理,并給出了具體的設計方法與電路結構。
1 光泵測磁原理
氦光泵磁力儀是原子共振磁測儀器,共振物質是氦氣。氦(He4)是一種惰性氣體,外殼為兩個電子。在正常情況下,氦原子沒有核矩,兩個電子自旋磁矩和軌道磁矩相互抵消,因此原子無磁性。為使氦原子產生磁矩,對氦進行高頻激發,使得氦原子外層電子殼層中的電子被激發到另一個亞穩態(23S1)狀態,使得氦原子存在磁矩。當出現外磁場時,由于原子磁矩和外磁場之間相互作用,處于亞穩態的氦原子產生塞曼分裂。分裂能級間的能量差與外磁場強度成正比。而電子在分裂能級間躍遷時發射或吸收的電磁波頻率與磁次能級間的能量差成正比,由此電磁波的頻率即可測定外磁場[1]。
本文所研究的氦光泵磁力儀的磁敏探頭工作原理如圖1 所示。氦燈高壓受激發出1 083 nm 的泵浦光,首先經透鏡變為平行光,再經圓偏振片和四分之一片后變成圓偏振光,然后作用于吸收室中的氦氣上。氦室中的氦氣在高頻激勵振蕩器的作用下,從基態激發到亞穩態,吸收來自氦燈的1 083 nm 的圓偏振光后發生躍遷,使透過氦室的光減弱。而受激原子又僅停留10-8s 之后以等概率回到23S1各次能級上。從而實現了光學取向,沒有原子再吸收Dl 線,此時透過氦室的光最強。當氦室上加入一個交變射頻磁場,將產生塞曼效應,由于交變磁場與氦室內已取向的原子磁矩之間的相互作用,產生去取向,使透過氦室的光強隨著去取向作用增強而減弱。當外加的交變磁場的頻率等于兩相鄰次能級之間的躍遷頻率時發生磁共振,此時去取向作用最強,也是透過氦室的光線最弱。通過測量交變磁場的頻率可以由式

求得被測磁場的大小,其中γS為旋磁比[3]。氦的旋磁比為(2. 675 198 7±0. 000 007 5)×108T-1S-1,即1 Hz 對應0.035 684 nT。
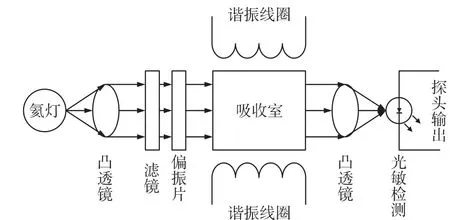
圖1 磁敏探頭結構圖
2 跟蹤磁測原理
為了實現對外加的交變磁場的跟蹤測量,目前通常采用如圖2 所示的跟蹤環路。其基本的工作原理如下:本地振蕩器產生一個低頻本振cosΩt,一路送與相敏檢波器,另一路送至壓控振蕩器(VCO)的電壓控制端產生一個中心頻率f'的調頻信號,該信號即為氦室的外加交變磁場;當VCO 輸出的中心頻率f0小于由當前磁場決定的磁共振頻率fL時,光泵探頭會產生一個與低頻本振同頻反相的信號,與低頻本振經過相敏檢波器產生直流負電壓,使反相積分器的輸出上升,進而提升VCO 輸出的中心頻率f0;反之壓低VCO 輸出的中心頻率f0;只有當VCO輸出的中心頻率f0恰好等于磁共振頻率fL時,光泵探頭產生的信號是低頻本振的二次諧波,無法通過選頻放大器,此時相敏檢波器輸出為0,積分器維持原電壓輸出,從而VCO 輸出的中心頻率f0保持不變,恰好等于fL,環路進入鎖定狀態[3]。
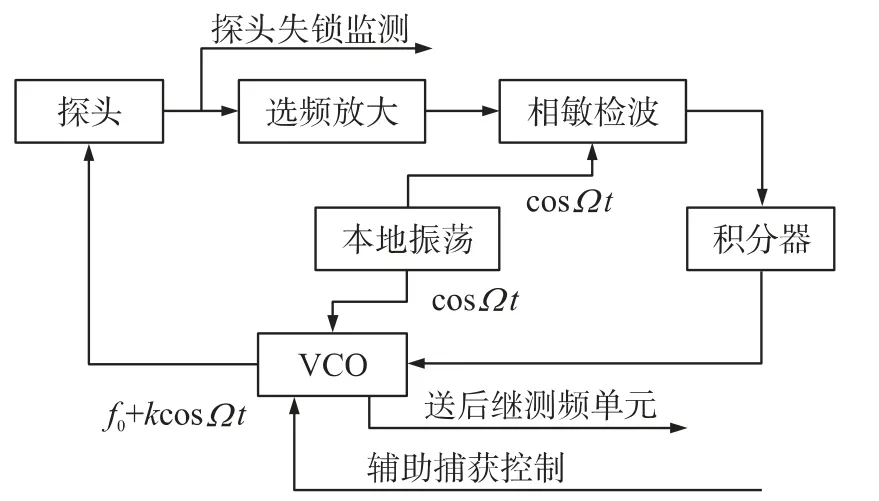
圖2 光泵磁力儀跟蹤環路
3 系統模塊設計
跟蹤系統中決定跟蹤性能的模塊為選頻放大器、壓控振蕩器、相敏檢波器、積分器以及輔助捕獲電路,下面來逐一加以分析。
3.1 跟蹤環路
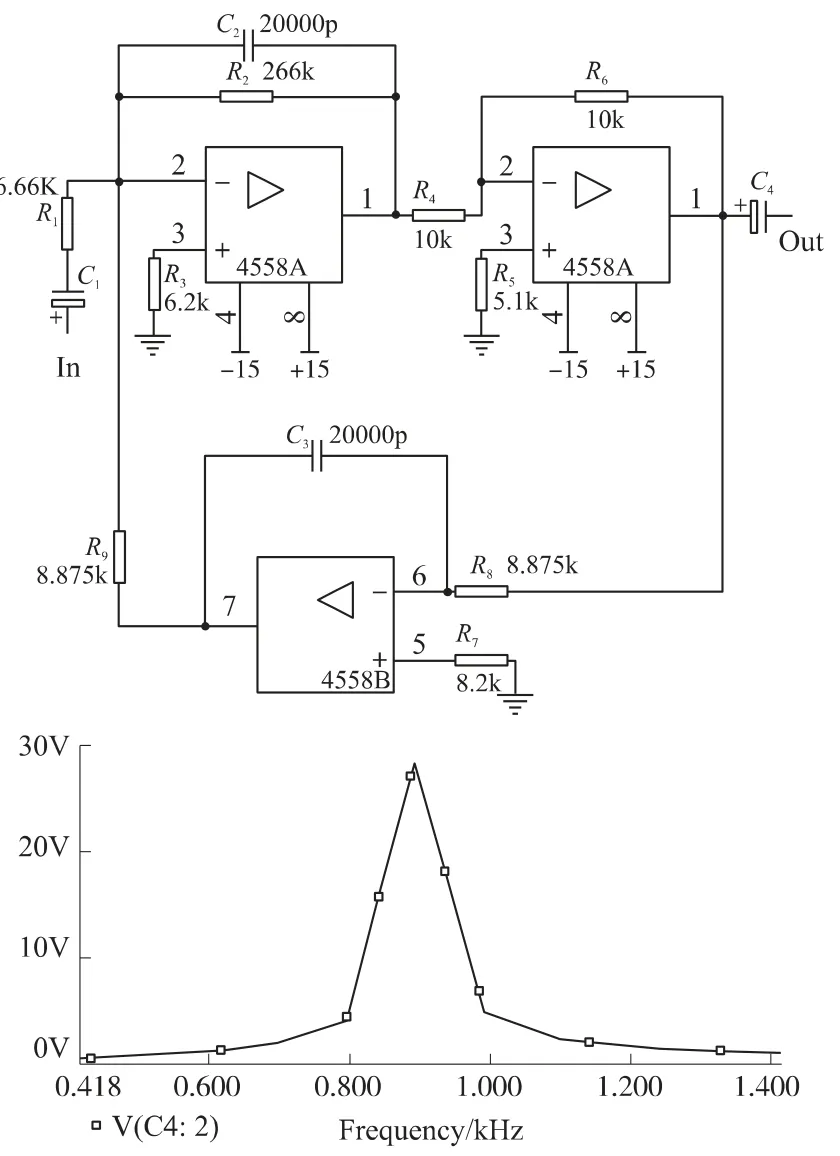
圖3 帶通濾波器與幅頻特性
光泵探頭的輸出需要利用帶通濾波器濾除探頭輸出信號中的雜波,選出與低頻本振頻率一致的有用信號。本系統采用了高Q 值的正反饋型有源帶通濾波器,電路結構和頻率特性如圖3 所示。其中所使用的運放為通用低功耗雙極性運放MC4558。第1 級是普通單級濾波器,其Q 值較低;第2 級是反相器,為了提高整個電路的Q 值,用積分型低通濾波器引入一定量的正反饋,所以此電路有較好的選頻特性[4]。
在跟蹤系統中,壓控振蕩器(VCO)產生探頭氦室的外加交變磁場,當外磁場變化時,探頭的諧振頻率(拉莫爾頻率)f0改變,相敏檢波器輸出的相差信號經積分器產生相應的控制信號,提升或降低VCO的輸出基頻f',維持f'對f0的跟蹤,形成一個穩定的閉環跟蹤系統。此時后繼的處理系統只需高精度的測出VCO 的輸出基頻f'就可以反演外磁場頻率。
本跟蹤系統使用的VCO 為改進型壓控振蕩器,如圖4 所示[5]。其中Cvar為壓控可變電容的極間電容,控制電壓通過改變Cvar來調整VCO 輸出信號的頻率,二者在一定范圍內近似呈線性關系,能夠滿足跟蹤的需要。
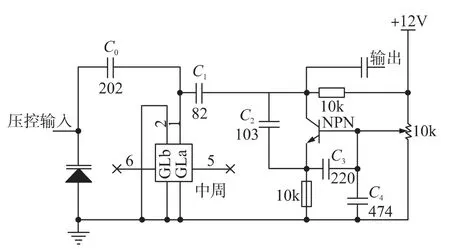
圖4 改進型壓控振蕩器
這種振蕩器屬于改進型的電容三端式振蕩器,頻率覆蓋范圍寬,達到1.2 MHz ~2 MHz,頻率穩定性也較好;同時由于輸出與反饋都取自電容,這樣對高次諧波阻抗小,濾除能力強,使得輸出波形質量較好[5]。由于上述這些優點,這種振蕩器在無線收發與電子測量儀器等場合得到了廣泛的應用。
相敏檢波可以利用二極管雙平衡變頻單元實現,電路簡單,成本低廉[6]。積分器為傳統的運放積分電路。這里采用的運放為AD 公司的超高精度儀用運放OP177,能夠在很寬的溫度范圍內獲得極低的失調電壓(最大25 μV),以及不超過2 mA 的電源電流[7],能夠滿足航磁儀測量精度與低功耗要求。
3.2 控制系統設計
目前光泵磁力儀在前端一般采用基于相位的跟蹤鎖定環路來保持光泵探頭的磁共振狀態,這樣只要測量環路中VCO 的輸出基頻就可以反演出磁場值。因此磁力儀后端控制系統的任務就是實時測頻、實時顯示、數據存儲以及前端跟蹤環路的失鎖輔助捕獲,如圖5 所示。
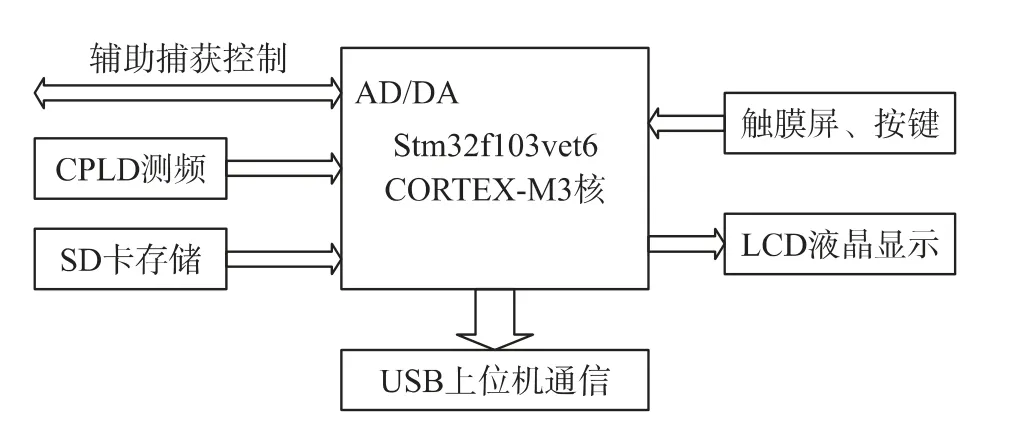
圖5 磁力儀控制系統原理圖
stm32f103vet6 是基于ARM Cortex-M3 技術的32 bit 低功耗MCU[8],最大主頻達到72 MHz,擁有3個12 bit 的高速ADC、2 個12 bit 的DAC 和多達112個高速I/O 端口,同時片上還集成了常用的I2C、USB 與SPI 接口。正是因為這么多豐富的資源,stm32f103vet6 能夠方便的實現與測頻、顯示、存儲以及上位機的接口,同時利用富余的端口完成前端跟蹤環路的失鎖輔助捕獲。
3.2.1 實時測頻模塊
正常情況下地磁場的強度在50 000 nT到60 000 nT 之間,轉化為拉莫爾頻率值約為1. 4 MHz 到1.6 MHz,此高頻信號使用直接測頻法測量頻率,即通過記錄一定時間間隔內的信號周期數來反演信號頻率。考慮到地磁場正常情況下以某一定值為中心上下微弱的波動,在磁異常時(例如附近有礦產)地磁場會有一定程度的變化,通常這種變化不會太劇烈。為了能夠實時的反映磁場的波動情況,可將每次測頻時間,即計數時間間隔t 設為0.1 s。這樣0.1 s 內的信號周期數N 乘以10 即為拉莫爾頻率值。由于計數測頻存在±1 誤差,所以拉莫爾頻率值可能存在10 Hz 的誤差。為了提高測頻精度,可以將不超過2 MHz 的待測信號經兩級級聯的鎖相環,共64 倍頻后輸入測頻模塊進行計數。這樣等效于將計數時間間隔t 設為6.4 s,此時對應的測頻誤差ΔF 為0.156 Hz,相應的理論測磁精度為0.006 nT。
由于本磁力儀的主控MCU 最大工作頻率為64 MHz,而待測信號可以達到120 MHz,所以不能直接使用主控MCU 來測頻。在此我們利用Atmel 公司的高速CPLD 芯片EPM240T100I5N 來充當專門的測頻模塊,其最大工作頻率為300 MHz,能夠滿足待測信號的計數測頻要求[9]。由于計數時間間隔t 的精度直接影響測頻精度,這就對CPLD的工作時鐘提出了較高的要求。由計數測頻的基本關系(此處t=0.1 s,時鐘標稱值10 MHz),可以推出時鐘漂移Δf 與測頻誤差ΔF 之間的關系為

其中F 為拉莫爾頻率64 倍頻后的待測信號頻率,當其達到10 Hz 的測頻精度,即對應原始拉莫爾頻率0.156 Hz 的測頻精度,Δf 最小為50 Hz,即相對頻率穩定度為5×10-6,這需要溫補晶振來實現。綜合考慮了±1 誤差和時鐘漂移之后,拉莫爾頻率的理論測量精度為0.3 Hz,即對應測磁精度為0.01 nT。
整個測頻模塊分為兩部分,一部分是計數測頻,另一部分是SPI 通信接口。計數測頻部分將0.1 s內的32 bit 計數值由SPI 接口發送給磁力儀的主控MCU,供其反演相應的磁場值。具體的模塊結構如圖6 所示。
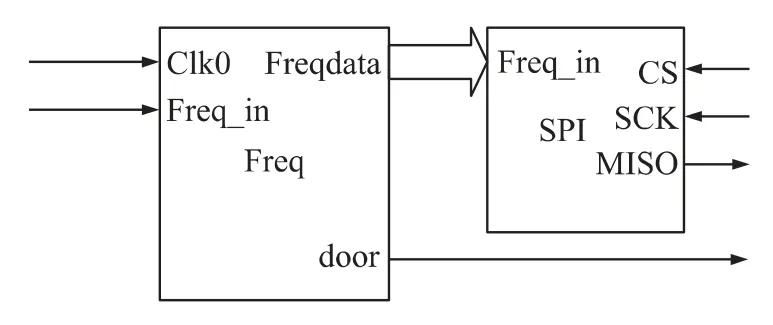
圖6 測頻模塊原理圖
圖中“Freq”部分為測頻計,其中Clk0 輸入有源晶振提供的25 MHz 系統時鐘,Freq_in 輸入待測頻率信號,Freqdata 是反映頻率的計數值(32 bit),door是測頻計輸出的狀態位,高電平時完成一個測量周期,可以讀取數據,反之則是測頻計正在計數,不能讀取數據。
由于stm32f103vet6 作為主機只需讀取作為從機的CPLD 的數據,因此數據的傳輸只需要MISO一個引腳,SCK 為主機發出的數據傳輸時鐘,CS 為片選信號。SPI 傳輸方式有一個優點:普通的串行通訊一次連續傳送至少8 bit 數據,而SPI 允許數據一位一位的傳送,甚至允許暫停,因為SCK 時鐘線由主控設備控制,當沒有時鐘跳變時,從設備不采集或傳送數據,這樣主設備通過對SCK 時鐘線的控制可以完成對通訊的控制[10]。
3.2.2 實時顯示與數據存儲
中央控制器 stm32f103vet6 從 SPI 接口接收0.1 s 內采集的32 bit 頻率計數值,反演出對應的磁場值。顯示系統為240×320 的LCD 真彩屏,采用16 bit LCD 控制器ILI9320 與主機通信,支持262144 種色彩,可以以數值或曲線形式實時顯示磁場強度、拉莫爾頻率、采樣率等測量結果和重要參數[11]。
磁測數據的存儲使用SD 卡。SD 卡有SD 總線和SPI 總線兩種工作模式,其中SD 總線模式采用4條數據線并行高速傳輸數據,但是傳輸協議復雜,只有少數單片機才擁有此接口;而SPI 總線傳輸協議簡單,雖然數據傳輸率較低,但絕大多數中高檔單片機都具備SPI 接口,因此簡化了設計,降低了成本,所以本系統使用SPI 模式與SD 卡通信[12]。最終每次的磁測數據以FAT32 文件系統的形式保存在SD卡上。整個系統的軟件流程如圖7 所示。
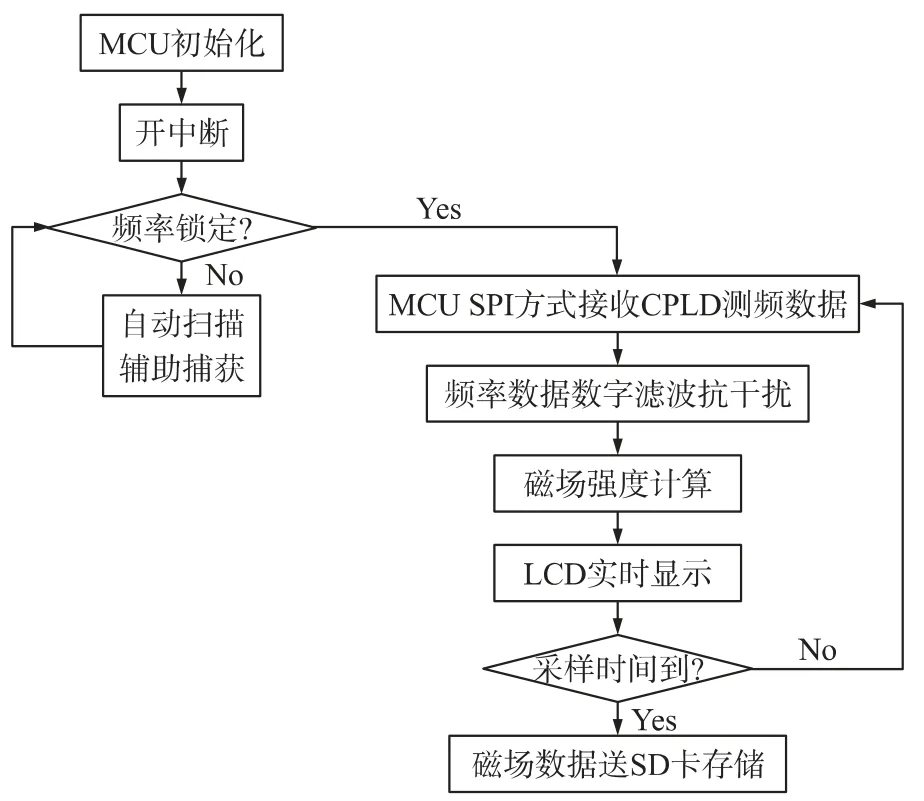
圖7 軟件系統流程
3.2.3 輔助捕獲電路
類似于鎖相環,本跟蹤環路也存在輔助捕獲問題。當VCO 的初始中心頻率距離探頭的諧振頻率(拉莫爾頻率)太遠時,探頭輸出為近似的恒定信號,無法實現環路的自動跟蹤,此時就需要引入輔助捕獲電路。其基本原理就是給VCO 的電壓控制端提供一個掃描電壓,逐步提升或降低VCO 的輸出基頻f',當f'進入快捕帶時,就可通過環路本身的牽引作用,使跟蹤環路立即捕獲并鎖定。
目前常用的輔助捕獲電路可以分為人工手動電調或自動電調,手動電調電路簡單,但是需要人的判斷與操控,很不靈活方便,所以現代電子系統一般都采用自動電調。本文利用中央控制器stm32f103vet6的富余端口來完成輔助捕獲功能。其基本思想如下:利用MCU 的ADC 實時采集探頭的輸出信號,如果在一定的采樣率下連續采集到的N 個點都是近似的恒定值,那么就認為已經失鎖;此時,MCU 控制DAC 輸出一個鋸齒狀掃描電壓,逐步提升或降低VCO 的輸出基頻;當進入環路快捕帶時,環路就會由于本身的牽引作用立即自動捕獲并鎖定。
4 實驗與結論
設計完成后,為了驗證測磁系統的性能,將其與目前主流的GB-4A 型氦光泵磁力儀進行對比實驗,場地為空曠的操場,以避免建筑物鋼筋結構的鐵磁干擾,在不同的日期,不同的時刻進行多次實測,部分結果如表1 所示。其中T1、T2分別代表設計的光泵測磁系統與GB-4A 型氦光泵磁力儀的磁測值,單位nT。
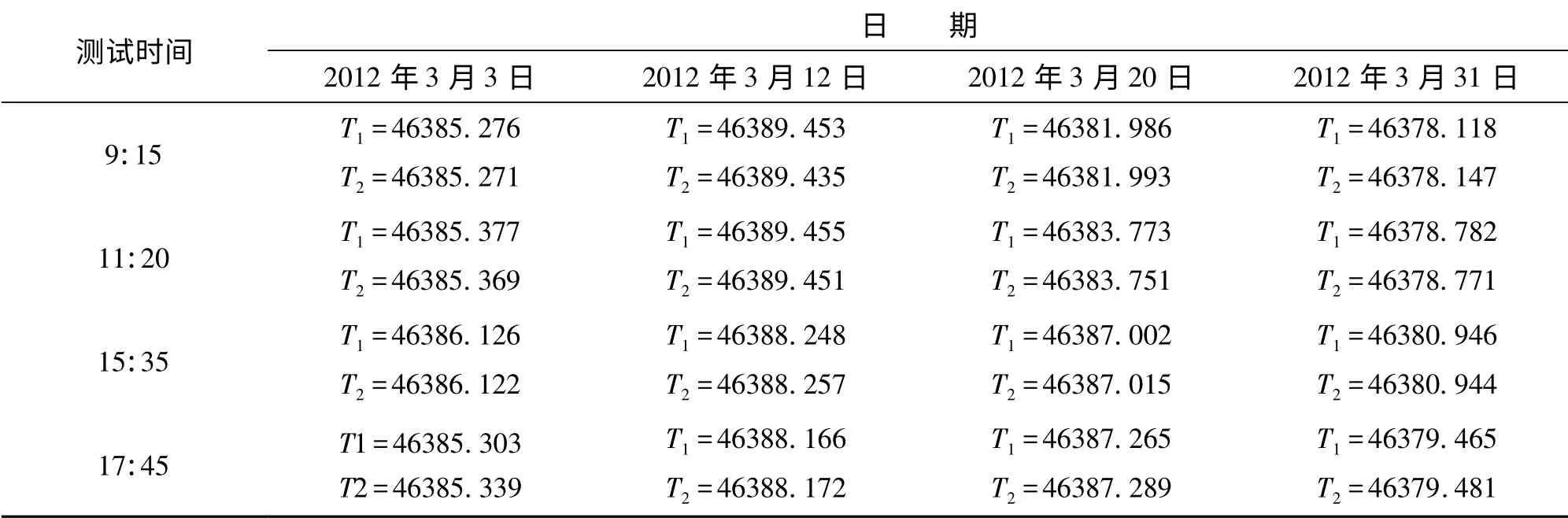
表1 地磁測量對比試驗結果 單位:nT
實驗結果表明系統測磁精度和目前主流的GB-4A 型氦光泵磁力儀相近,約為0.01 nT,每次開機與失鎖后的捕獲時間小于5 s,其主要優勢在于:采用緊湊型表貼元器件、低功耗ARM 處理器和CPLD測頻模塊的組合,使得設備體積與功耗大大減小,尤其適用于無人機等空間受限的場合;充分利用ARM處理器的富余端口,無需額外電路實現了前端跟蹤鎖定環路的輔助捕獲功能,相比GB-4A 的手動捕獲,大大提高了自動化程度;運用廉價的分立元件構建VCO,進一步降低了成本。因此本系統在無人機航空磁測等領域具有良好的應用前景。
[1] 管志寧.地磁場與磁力勘探[M].北京:地質出版社,2005:18-22.
[2] 肖勝紅,肖振坤.弱磁場檢測方法與儀器研究[J].艦船電子工程,2006,26(4):160-163.
[3] Douglas D McGregor. High-Sensitivity Helium Resonance Magnetometers[J].Review of Scientific Instruments,1987,58(6):1067-1076.
[4] Williams B,Fred J Teaylor,著. 電子濾波器設計[M]. 寧彥卿,譯.北京:科學出版社,2008:98-101.
[5] 葉保(日),著.振蕩電路的設計與應用[M].何希才,譯.北京:科學出版社,2004:79-81.
[6] 王康年.高頻電子線路[M].西安:西安電子科技大學出版社,2009:157-159.
[7] Analog Devices Company. Ultra precision Operational Amplifier[R].http://www.analog.com,2005.
[8] ST Company. High-Density Performance Line ARM-Based 32-bit MCU with 256 to 512KB Flash,USB,CAN,11 Timers,3 ADCs,13 Communication Interfaces[R].http://www.st.com,2009.
[9] Altera Corporation. MAX Ⅱ Device Family Data Sheet[R].http://www.Altera.com,2009.
[10] Matsushita Electric Industrial Co.,Ltd. SD Memory Card Specifications[R].http://www.panasonic.com,2000.
[11] 王賓,楊岸.基于DSP 的觸摸式MP3 的設計[J].電子技術應用,2010,7:88-92.
[12] 田茂,鮮于李可.SPI 模式下SD 卡驅動的設計與實現[J]. 現代電子技術,2009,32(14):126-129.
猜你喜歡
當代陜西(2022年6期)2022-04-19 12:11:54
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
華人時刊(2020年13期)2020-09-25 08:21:42
中學生數理化(高中版.高二數學)(2020年1期)2020-02-20 13:22:30
中國生殖健康(2019年3期)2019-02-01 06:12:26
中學生數理化·高二版(2016年12期)2017-02-28 10:08:42
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
Coco薇(2016年1期)2016-01-11 16:53:24
