一種改進的自組織生物群體仿真模型
2012-12-27 06:00:08王楠楠王元剛
大連民族大學學報 2012年1期
關鍵詞:仿真
王楠楠,于 航,陳 婧,王元剛
(大連民族學院 a.土木建筑與工程學院;b.計算機科學與工程學院,遼寧大連 116605)
一種改進的自組織生物群體仿真模型
王楠楠a,于 航a,陳 婧b,王元剛b
(大連民族學院 a.土木建筑與工程學院;b.計算機科學與工程學院,遼寧大連 116605)
在Boid群體仿真規則基礎上,增加了3類控制變量:環境變量、種群特征變量和性格變量構建自組織生物群體仿真系統。利用社會學習因子和自學習因子構建了個體的種群靠攏系數、速度匹配系數和自由游弋系數等參數,去除了傳統模型中個體一致性假設,更為真實地反映不同生物群體的群體行為。本文在此基礎上構建了相應的仿真平臺。仿真實驗結果表明,可以更好地對生物群體行為仿真進行建模,同時給出了鳥群、魚群和昆蟲群3種典型生物群體仿真的參數集合,同時還分析了不同群體的特征。關鍵詞:群體仿真;Boid模型;仿真
不同的生物群體如鳥群、魚群和昆蟲群,聚集在一起共同覓食和逃避捕食者。群落規模以十、百、千甚至萬計,并且經常不存在一個統一的指揮者。它們的群體復雜而美麗,人類一直探尋不同生物群體的行為規則,不同生物群體行為規律的研究對于人類揭示自然和利用生物群體規律構建場景視覺都具有重要的意義。
對生物群體行為的仿真有兩種方法:第一種方法是數學方法,考慮到相同物種的相互吸引與排斥的同時,基于每個個體的隨機移動,利用歐拉連續方程進行描述,從而描述整個群體的密度,或者基于個體的軌跡,利用拉格朗日方程對于個體的移動、速度等進行描述。第一種方法很難模擬和仿真出不同生物群體的行為規律,構建仿真模型和真實的群體行為差別很大。第二種方法是主體的仿真(Agent Based Simulation)[1],該方法不利用方程,而是通過對個體行為準則的模擬進行建模,強調群體中的每個個體的特性,更強調個體之間的相互交互作用。
其中比較著名的群體仿真模型為Boid模型[2],該模型是 1986年 Craig Reynolds提出的,用以模擬鳥類聚集飛行的行為[3-5]。鳥群的同步飛行只是建立在每只鳥對周圍的局部感知上,并不存在一個集中的控制者。也就是說整個群體組織起來,卻沒有一個組織者,群體之間相互協調也沒有一個協調者。首先,前提條件是鳥群沒有全局控制,而且每個鳥的能力有限,只受其臨近鳥類的影響。在通常情況下,自然界形成的生物群體并沒有數量限制,魚群可以連綿17英里,每個個體不可能對全局敏感。這種生物群體通過群體信息的交互來躲避入侵者,提高種群的生存能力,進行高效的食物搜索。如圖1,Reynolds提出了3條簡單的規則來仿真這種復雜的生物群體行為。
(1)避免碰撞(Collision Avoidance):避免和鄰近的個體相碰撞;
(2)速度一致(Velocity Matching):和鄰近的個體的平均速度保持一致;
(3)向中心聚集(Flock Centering):向鄰近個體的平均位置移動。
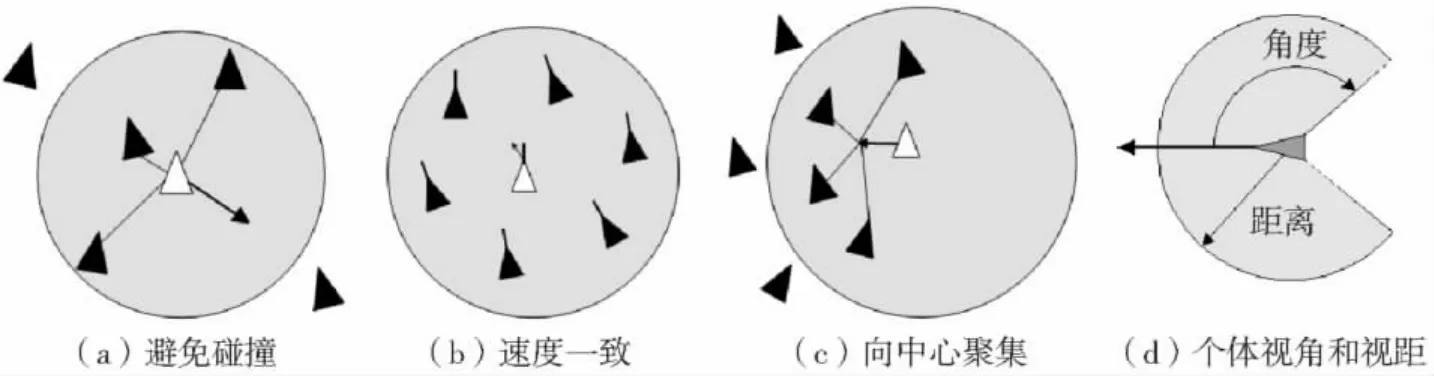
圖1 Boid群體仿真基本規則
1 改進的Boid群體仿真模型
本文提出的算法改進模型包括3類控制變量:環境變量、種群特征變量和性格變量。環境變量主要指生物仿真環境的阻力和重力因素。種群變量主要是群體中個體和群體的響應參數,包括視距和視角,個體期望距離,安全距離、警戒距離,個體各方向最大加速度和最大速度;個體性格變量是本模型的特色之處,不同群體中的個體紀律性是不同的,其中包含與群體同步的社會學習因子C1和保持個體行為的自我偏好因子C2,同時根據這兩個變量構建了4個群體性格特征變量:種群靠攏偏好、速度匹配偏好、平行移動偏好。如圖2是本文開發的群體仿真模型系統,左圖為仿真環境,右圖為各種控制變量設置。
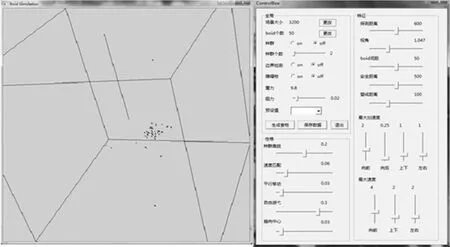
圖2 自組織生物群體仿真系統
1.1 種群特征變量
(1)視距和視角。視距和視角用來表示個體的視野范圍。視野范圍如圖1(d)。視距或者視角的改變都可使個體的視野范圍發生改變。視野范圍越大,能夠可視的其他個體越多,所以其他規則計算時需要的鄰域個體也會隨之擴大,視野的擴大有利于群體的信息交互,使得信息交換速度和效率增大,可以使個體和群體更加有效地發現食物或躲避障礙物。
(2)個體間期望距離。個體間期望距離包括個體間安全距離和群體保護距離。個體間安全距離是指生物群體由于高速運動個體間需要一定的安全距離,群體保護距離是因為個體間由于群體可以提供保護不期望個體間距離過遠,因此個體間期望距離因群體類別和環境而各不相同。
(3)安全距離。如果障礙物在某個體前方,且該障礙物已在其視野范圍內。安全距離就是個體距離障礙物或危險物體的最小距離。當距離小于安全距離時,個體開始考慮躲避障礙物。安全距離如果設置越大,個體會越早開始進行躲避障礙物的動作調整。
(4)警戒距離。警戒距離是個體當前距離危險源或碰撞事件的最小距離,一旦個體進入警戒距離會采用大幅度動作調整進行躲避。警戒距離的設定主要考慮當個體由于自身或環境突然改變,例如突然出現障礙物或個體間將要碰撞,個體進入較大幅度姿態調整的閾值。
(5)最大加速度。最大加速度由于個體不同而設置的加速度閾值。例如鳥類在飛行過程中基本向前飛行,前進方向的加速度遠遠大于后退飛行的加速度。主要對加速度在以個體運動坐標上4個方向加速度進行最大值設置:最大前進加速度,最大后退加速度,最大左右加速度,此外還有在環境坐標下個體由于引力和運動能力而產生的垂直上和下的加速度。最大加速度越大,速度的改變量就越大,個體可以更快的加速、減速以及轉向。
(6)最大速度。最大速度是指個體在運動過程中以自身為坐標的前進方向速度最大值,像最左或右最大速度和垂直最大速度。
1.2 性格變量
本文稱C1,C2為性格系數,且C1+C2=1。例如某個群體紀律性較強,則它們群體速度保持一致的規則占性格比重較大;某個群體特別喜歡集群,則它們向群體中心靠攏的規則占性格比重較大。這些規則組成了個體的性格,不同的學習因子比重可以構建不同性格的個體。
本文通過C1,C2構建了種群靠攏變量、速度匹配變量、平行移動變量、自由游弋變量和趨向中心系數。其中,種群靠攏變量是個體向種群中心靠攏的性格系數。性格系數越大,最終加速度越能體現種群靠攏的行為,群體就更容易聚集在一起;速度匹配變量是個體與群體保持一致的性格系數。性格系數越大,最終加速度越能體現速度匹配的行為,群體的速度看起來會更一致;平行移動變量是個體保持在同一水流層的性格系數。性格系數越大,最終加速度越能體現平行移動的行為,群體看起來在豎直方向上的浮動就會越小;自由游弋變量是個體自由游弋的性格系數,該系數越大,最終加速度的隨機性就越大,整個群體看起來就更加無序化;趨向中心系數是個體即趨向場景中心的性格系數。性格系數越大,種群的運動就越靠近場景中心。
2 實驗仿真結果
本文將場景的三維設為(3200,3200,3200),個體的三維設為(36,18,24),單位為像素。場景相對較大,因此將趨向場景中心的性格系數設為0,可以更直觀地展示其他參數對群體運動的控制作用。通過仿真實驗列出了3種生物群體的仿真控制參數見表1,這3種典型的生物群體分別是魚群、鳥群、昆蟲群。

表1 3種群體的參數表
經過大量實驗得出表1的不同的類別生物群體仿真參數。下面針對各種參數分析不同群體的特點。針對阻力參數,魚群在水中受到的阻力相對較大,鳥群和昆蟲群在空中飛行受到的阻力相對較小;針對視距和視角參數,魚群的視距較近,昆蟲的視距最短,鳥群擁有最高的視距,因為鳥類飛行速度快,視野開闊。魚群的視角一般,為π/3;鳥群的視角稍大;昆蟲的視角最小;針對個體間期望距離參數:魚群間期望距離一般,鳥群間期望距離最大,因為它們飛行速度快,距離太近容易相撞,昆蟲間期望距離最小;針對安全距離參數:魚群的安全距離一般,鳥群的安全距離最大,因為它們飛行速度快,需要及早考慮躲避障礙或邊界的問題;昆蟲的安全距離最小,因為昆蟲的轉向靈敏,在很短的距離就可以躲避障礙;針對警戒距離參數:同安全距離一樣,鳥群需要的警戒距離最大,魚群次之,昆蟲最小;針對最大加速度和速度參數:魚群活動緩慢笨重,加速度較小;鳥群行動輕快,加速度較大;昆蟲體積小巧,最為靈敏,加速度最大。魚群生活在水中,速度相對較慢;鳥群速度最快;昆蟲個體較小,速度居中。針對種群靠攏參數:魚群的群體行動較為集中,種群靠攏因數相對較大;鳥群相對分散,種群靠攏因數較小;昆蟲集中飛行行為最不明顯,因此種群靠攏因數最小。針對速度匹配參數:魚群的行動較為一致,速度匹配因數稍大;鳥群的行動最為一致,速度匹配因數為3種群中最大;昆蟲的行動比較雜亂,速度匹配因數較小。針對平行移動參數:魚群上下浮動較少,平行移動因數較大;鳥群上下浮動最少,因此平行移動因數最大;昆蟲上下浮動最多,平行移動因數設為最小。針對自由游弋參數:魚群的自由游弋因數相對較高;鳥群紀律良好,自由游弋因數較低;昆蟲行動雜亂,自由游弋因數最高。對于趨向中心均設為0。如圖3給出了不同群體仿真的仿真運動過程截圖。圖3(a)為魚群的群體運動效果,圖3(b)為鳥群的群體運動效果,圖3(c)為昆蟲的群體運動效果。
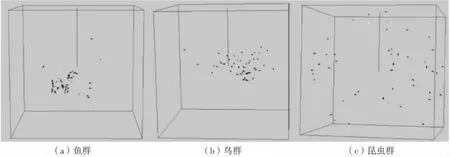
圖3 不同群體的仿真運動截圖
3 總結
本文在Boid群體仿真規則基礎上,通過對3類控制變量:環境變量、種群特征變量和性格變量的改進和不同群體仿真的需求,對群體仿真構建了相應規則及其參數,并在此基礎上構建了相應的仿真平臺,實驗結果表明,本文提出的改進模型可以更好地對生物群體行為仿真進行建模,可以更為真實地反映出不同生物群體的群體行為。
[1]AGHA.A Model of Concurrent Computation in Distributed Systems[M].Massachusetts:The MIT Press,1986.
[2]李曉磊,邵之江,錢積新.一種基于動物自治體的尋優模式:魚群算法[J].系統工程理論與實踐 ,2002,22(11):32-38.
[3]REYNOLDS C W.F1ocks.Herds and d Schools:A Distributed Behavioral Model[J].Computer Graphics,1987,21(4):25-32.
[4]MILLONAS M M.Swarms.Phase Transitions and Collective Intelligence[C].Langton C G Ed.Artificial Life.Snata Fe Institute Studies in the Sciences of Complexity,Addison Wesley,1994:417 -444.
[5] E BONAOC M DOLIGO.G Theraulaz.Swarm Intelligence:From Natural to Artificial Systems[M].New York:Oxford University Press,1999.
An Improved Self-organization Biological Swarm Simulation Model
WANG Nan -nana,YU Hanga,CHEN Jingb,WANG Yuan -gangb
(a.College of Architecture and Civil Engineering;b.College of Computer Science and Engineering,Dalian Nationalities University,Dalian Liaoning 116605,China)
On the basis of Boid simulation model,in this paper three types of control variables are increased which are environment variables,population character variables and personality variables to build simulation systems of self-organization biological swarm.Traditional simulation model assumes that the individual parameters are identical,but the differences of individual parameters in real biological groups exist objectively.Therefore population closer coefficient,speed matching coefficient and free cruising coefficient and other parameters using social learning factors and self-learning factors are constructed,and the individual consistency assumptions in traditional model are remcved,which reflects the behavior of different groups of biological swarm even more truly.Based on the above the corresponding simulation platform is builded.Simulation results show that the improved model proposed in this paper is better for the modeling of the simulation of biological groups’behaviors,and gives parameter sets of simulation of birds,fish and insects groups of the three typical biological swarms,and at the same time analyzes the characteristics of different swarm.
swarm simulation;Boid model;simulation
TP301.6
A
1009-315X(2012)01-0081-04
2011-11-06
大連民族學院青年基金資助項目(2009A206);中央高校基本科研業務費專項資金資助項目(DC110302)。
王楠楠(1980-),女,遼寧沈陽人,講師,主要從事虛擬現實和計算機仿真研究。
(責任編輯 劉敏)
猜你喜歡
中國教育技術裝備(2016年20期)2016-12-12 10:09:15
中小企業管理與科技·下旬刊(2016年10期)2016-11-18 20:57:34
科技資訊(2016年18期)2016-11-15 20:09:22
科技資訊(2016年18期)2016-11-15 07:55:28
價值工程(2016年29期)2016-11-14 02:01:16
電子技術與軟件工程(2016年18期)2016-11-14 00:46:54
數字技術與應用(2016年9期)2016-11-09 23:25:33
數字技術與應用(2016年9期)2016-11-09 22:09:07
科技視界(2016年18期)2016-11-03 21:44:44
科技視界(2016年18期)2016-11-03 20:31:49
