固體微型推力器應用設計
2012-12-29 04:13:44劉旭輝陳君魏延明汪旭東
航天器工程 2012年6期
劉旭輝 陳君 魏延明 汪旭東
(北京控制工程研究所,北京 100081)
1 引言
衛星微型化是今后一個重要的發展方向,微型化也帶來了一定的挑戰,皮納衛星上難以攜帶常規的軌道控制動力系統,基本處于無控狀態,其利用價值大大降低。而固體微型推力器陣列體積小、集成度高、功耗低、可靠性高[1-2],能夠提供小而精確的沖量,可以作為微型衛星的執行機構,是一種新型的衛星控制動力裝置,可以進行高精度的姿態控制和軌道控制,能夠大大提升微型衛星的實用價值[3-4]。
現階段從事微推進系統的研究機構眾多,但各研究機構主要集中在對推力器的結構設計、性能試驗和仿真分析等方面的研究,基于推力器陣列與布局設計的研究國內外研究較少,但是現階段采用正四邊形的推力器陣列方式,無法保證每組推力器組合的合力通過衛星質心方向,不能滿足軌道控制的需要[5-6],須要設計一種滿足姿軌控的推力器陣列方法。
本文主要就推力器的陣列設計以及陣列布局設計進行分析研究,提出了正六邊形為基元的推力器陣列方式,對正六面體的推力器陣列布局進行了相關分析,可為固體微型推力器陣列的應用奠定一定基礎。
2 推力器陣列設計
2.1 固體微型推力器陣列工作特點
固體微推力器陣列中每個推力器單元只能使用一次,單個推力器沖量一定,通過選擇不同數量的推力器組合,或者選擇不同力臂的推力器來實現軌道和姿態的精控粗控,易于形成多種控制檔次。推力器陣列需要能夠滿足軌道控制和姿態控制,而現有的推力器陣列方式采用正四邊形為基元擴展而成,不能滿足軌道控制的需要,不能保證每次選擇的推力器組合均能通過衛星質心方面,因此需要對其進行設計。
推力器陣列布局方式對于姿態控制要求較低,而對于軌道控制需要合力通過衛星質心方向,并且需要推力器陣列布局具有較好的規律,便于進行尋址點火。
2.2 推力器陣列設計方法
根據控制要求,設計了一種新型的推力器陣列布局方式(圖1),基準生成圖形為正六邊形,按照式(1)進行擴展,即按照相鄰推力器間距相等的原則,生成其他推力器的位置,最終擴展出所需的陣列。

式中:rα、rβ為相鄰兩個推力器的位置矢量,dcon為給定值。

圖1 推力器陣列Fig.1 Thruster array
如圖1所示,中心顏色加深的正六邊形為基準圖形,設此正六邊形基元外接圓的半徑為RH,向外不斷擴展的推力器依然分布于外接圓半徑分別為2RH,3RH,…,nRH(n∈N)的正六邊形上。同樣,如果按照相鄰推力器間距相等的原則生成整個陣列,則中心基元為正六邊形,該種布局方式具有唯一性。
最終確定的推力器陣列基本原則為:①以正六邊形為基元;②每個相鄰推力器間距相等。將本設計方法命名為“正六邊形基元法”。
2.3 正六邊形基元的優點
(1)從幾何學角度講,正六邊形具有更好的對稱性,無論選擇偶數個推力器還是奇數個推力器進行組合,都能夠保證產生的合力通過圓心;正六邊形的邊長等于其外接圓半徑,便于求解出推力器的位置。相鄰推力器間距相等,擴展出其他的推力器仍然布局在外接圓半徑更大的正六邊形上,使推力器容易進行選擇組合。
(2)從拓撲學的角度看,正六邊形具有更好的連通性,增強了不同區域間推力器的聯系,且結構緊湊有規律,容易找出規律,利于姿軌控推力器分配算法的設計。
(3)以正六邊形為基元的推力器陣列相對于正四邊形的可以有效提高單位面積上推力器的數量,布置相同數量的推力器能夠節省一定的衛星表面使用面積。
2.4 正六邊形陣列設計的特點
按照正六邊形基元法生成的推力器陣列不但能夠滿足衛星姿態控制和軌道控制的要求,而且具有較強的規律性,利于進行推力器分配算法設計。
如圖1所示,將正六邊形基元的外接圓命名為基準圓,將與正六邊形邊相交并且有兩個交點的圓命名為正六邊形的割圓。
由圖1可知,所有的推力器均分布在某一半徑上的圓上,并且每個圓上的推力器個數為6個或12個。外接圓半徑為2RH的正六邊形上的推力器分布在兩個同心圓上,一個是正六邊形的外接圓,一個是正六邊形的內切圓;外接圓半徑為3RH的正六邊形上的推力器分布在正六邊形的外接圓和正六邊形的割圓上,外接圓半徑為4RH的正六邊形上的推力器分布在正六邊形的外接圓、割圓以及內切圓上。依照該方法,生成的推力器均處于外接圓半徑為2kRH或(2k-1)RH的正六邊形上(k∈N),同時所有的推力器分布于基準圓的某個同心圓上。
由圖1及以上分析可知,向外擴展的正六邊形上的推力器所在的同心圓分為三種圓:正六邊形的外接圓;正六邊形的內切圓;正六邊形邊的割圓。外接圓、內切圓上推力器個數為6 個,割圓上推力器的個數為12 個。對于不同外接圓半徑的正六邊形,正六邊形的外接圓、內切圓及割圓的數量存在一定的規律性;在每種外接圓半徑下各個圓上的推力器分布個數也具有一定的規律性,具體分布規律如表1所示。

表1 推力器數量分布規律Table 1 Distribution of thruster number
當外接圓半徑為2kRH時,推力器的個數為12×k2+6×k。當外接圓半徑為(2k-1)RH時,推力器的個數為12×k2-6×k。假設k=15,外接圓半徑為29RH,則陣列外接圓的個數為29個,內切圓的個數為14個,割圓的個數為196個,其他推力器沒有分布在整圓上。共有推力器個數為29×6+14×6+196×12,即2610個。
2.5 應用性分析
對于基于推力器陣列的衛星控制,當僅進行姿態控制時,根據所需的沖量矩,推力器成對組合,沖量方向相反,抵消對軌道控制的影響,僅保留對姿態角速度的影響。
而僅進行軌道控制時,將推力器陣列圓周上推力器進行分組,每6個推力器為一組,由表1提供的推力器分布規律,容易進行推力器分組。將圓周上推力器個數為12個的分成2組,圓周上推力器個數為18的分為3組,每組相鄰推力器間構成60°夾角。設單個推力器的沖量為Ⅰmin,當需要2Ⅰmin時,需要兩個推力器角度間隔180°;當需要3Ⅰmin時,3 個推力器需要兩兩間隔120°。對于所需偶數個推力器可以按照組合產生2Ⅰmin的方式,對于產生小于6Ⅰmin沖量的情況,要分別處理,如果點1個推力器,則需要相對兩個推力器陣列組合產生,一個點2個推力器,另一個相對的陣列點3個推力器;如果點5個推力器,則需拆成2 個和3 個組合產生;產生1Ⅰmin浪費的推力器太多,因此,除了1個推力器之外,其他余數按照7來計算,產生7Ⅰmin沖量時,則分成3Ⅰmin和4Ⅰmin的組合,由一個陣列提供即可。依據以上的組合規則進行組合,根據陣列的使用情況,提供軌道控制所需的沖量。
3 推力器陣列在皮納衛星上布局設計
陣列安裝需要滿足姿軌控的要求,并且通常以能夠提供較大的沖量矩為標準來設計陣列的安裝方式。
設O-XoYoZo為星體坐標系,原點O在衛星質心,Xo、Yo、Zo三軸為衛星的慣量主軸,將推力器陣列所在坐標系a-XaYaZa命名為“陣列坐標系”,原點a為陣列中心,推力沖量方向與aXa軸一致,安裝時,aXa通過衛星質心方向。設ea=[eaxeayeaz]T為陣列坐標系的三個基本矢量,該陣列安裝時垂直于XaaYa面,設陣列與Oa夾角為?j,如圖3所示。當僅產生沖量矩時,推力器以成對的方式進行組合,因此產生繞垂直于沖量方向與衛星中心O構成的平面的控制軸的沖量矩,設控制軸為Ol,該軸正方向垂直于XaaYa向外。如圖2(a)所示,第j個陣列中第i個推力器的沖量矢量在陣列坐標系中為Iaji,推力器陣列-Ya平面內,第i-個推力器在陣列坐標系中的坐標為rji- =(xi-,yi-,zi-)ea,該推力器的沖量為Iji-;+Ya平面內,第i+個推力器在陣列坐標系中的坐標為rji+=(xi+,yi+,zi+)ea,該推力器的沖量為Ⅰji+。Rji-、Rji+分別為Iji-、Iji- 在O-XoYoZo坐標系中的矢量位置;rjo為a在O-XoYoZo坐標系中的矢量位置。

圖2 構形設計Fig.2 Configuration design
設MI為沖量矩,同一陣列中所有推力器的沖量方向相同,位置不同。對于位于-Ya平面內的推力器要求其產生繞Ol軸負方向的沖量矩MIji- ,而位于+Ya平面內的推力器要求其產生繞Ol軸正方向的沖量矩MIji+,以-Ya平面內產生的沖量矩為例進行分析。
同理可得:

由沖量矩方向要求可以確定?j取值范圍:

對于|MIji-|和|MIji+|,當推力器位置確定后,大小與?j有關,因此將所有推力器沖量矩能夠同時取得較大值作為優化目標。
可以得出,rjO⊥YaaZa時,即推力器陣列與陣列中心在星體坐標系中的矢量方向垂直時,推力器陣列對衛星的沖量矩能夠取得最大值。根據該關系,本文設計采用正六面體構型方式布置陣列,如圖3所示,在六個面上各布置一個陣列。

圖3 陣列布局Fig.3 Array configuration
假設進行六維控制任務,包括三維軌道控制,三維姿態控制,各個控制向量的陣列分配可以采用如表2所示的方案進行,陣列分配方案不是唯一的。
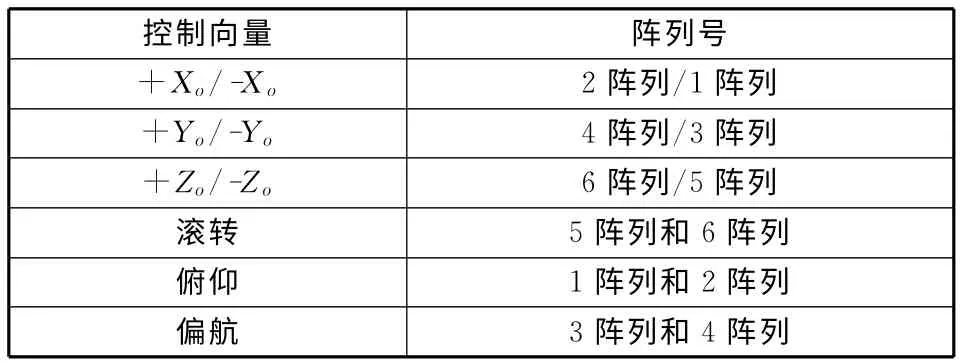
表2 控制向量陣列分配Table 2 Control vector allocation
4 包絡面繪制
在各個推力器陣列的沖量和沖量矩輸出范圍內,所有推力器陣列所能輸出的沖量和沖量矩的集合即為推力器配置的可達集,可達集的邊界即為包絡面,由包絡面能夠確定推力器陣列配置的控制能力[7-11]。
4.1 沖量包絡面繪制
設Ⅰmin=1×10-3N·s,每個陣列中用于軌道控制的推力器個數為kc,因此三軸的沖量范圍可以表示為

式中:1≤nc≤kc,nc為沖量個數;ⅠXo,ⅠYo,ⅠZo分別為Xo,Yo,Zo三個方向的沖量。
對于大規模推力器陣列包絡面上節點過多,無法研究分析其特點,設每個陣列上用于軌道控制的推力器個數kc=25,繪制沖量的包絡面。如果推力器陣列僅僅在軌道控制中的兩個方向產生作用,以控制Xo方向和Yo方向為例,總共布置四個陣列:1號陣列、2號陣列、3號陣列、4號陣列,則包絡面為二維平面,如圖4(a)所示。如果為三向控制,布置六個陣列,即在Xo、Yo、Zo方向都安裝陣列,則包絡面為正六面體,如圖4(b)所示。
4.2 沖量矩包絡面
設推力器陣列中相鄰推力器間距Lmin=2mm,MImin=Ⅰmin×Lmin=2×10-6N·s·m,MImin表示最小單位沖量矩。每個陣列能夠提供kt單位沖量矩,三個方向的沖量矩范圍為


圖4 沖量包絡面Fig.4 Impulse envelope
式中:1≤nt≤kt,nt表示沖量矩個數;MIXo,MIYo,MIZo分別為繞三個慣量主軸Xo,Yo,Zo的沖量矩。
以單個陣列能夠產生最大kt=25單位最小沖量矩進行姿態控制為例,如果僅僅安裝四個陣列即1~4 號陣列,則產生二維包絡面,如圖5(a)所示。如果安裝六個陣列在正六面體表面上,則將產生三維包絡面,如圖5(b)所示。
由圖4和圖5可知,當各個陣列都提供相同的沖量和沖量矩時,以正六面體方式布置六個陣列,沖量和沖量矩的包絡面為正六面體,最大控制能力由各個陣列的最大沖量和沖量矩決定,而控制精度由陣列能夠提供的最小沖量和沖量矩決定,可以根據不同的任務需要設計相關推力器的性能,配置各個陣列的規模。


圖5 沖量矩包絡圖Fig.5 Impulse moment envelope
5 小結
(1)研究了固體微型推力器陣列中推力器的設計方法,設計了適用于航天器姿軌控的正六邊形基元的推力器陣列,分析了其優點及其應用性。通過該方法設計的推力器陣列能夠滿足軌道控制時,每組推力器組合合力均能夠通過衛星質心的要求,并且通過此方法設計的陣列具有較強的規律性,便于準確尋址。
(2)以能夠提供較大的沖量矩為標準,研究了推力器陣列在皮納衛星上布局的方法,獲得了推力器陣列安裝的最優方式,當推力器陣列與陣列中心在星體坐標系中的矢量方向垂直,推力器陣列對衛星的沖量矩能夠取得最大值。
(3)設計了一種基于解耦控制的正六面體布局方式,能夠滿足姿軌控需要,研究了該布局方式的陣列布置的包絡面,能夠較容易根據空間任務需要進行陣列規模設計,配置相應推力器陣列。
(References)
[1]Larangot B,Conédéra V,Dubreuil P,et al.Solid propellant microthruster:an alternative propulsion device for nanosatellite[J].Aerospace Energetic Equipment,2002:12-14:12-14
[2]張高飛,尤政,胡松啟,等.基于MEMS的固體推進器陣列[J].北京.清華大學學報,2004,44(11):1489-1490
ZhangGaofei,You Zheng,Hu Songqi,et al.MEMSbased propulsion arrays with solid propellant[J].Beijing:Journal of Tsinghua University (Science and Technology),2004,44(11):1489-1490(in Chinese)
[3]Lewis D H,Janson S W,Cohen R B,et al.Digital micropropulsion[J].Sensors and Actuators:Physical,2000,80(2):143-156
[4]Rossi C,Conto D T,Esteve D,et al.Design,fabrication and modelling of MEMS-based microthrusters for space application[J].Institute of Physics Publishing.2001:1156-1162
[5]Zhang K L,Chou S K.Performance prediction of a novel solid-propellant microthruster[J].Journal of Propulsion and Power,2006,22(1):56-63
[6]Alexeenko A A,Levin A D.Girnelshein S F.Numerical study of flow structure and thrust performance for 3-D MEMS-based nozzles,AIAA 2002-3194[C]//32nd AIAA Fluid Dynamics Conference and Exhibit.Washington:AIAA,2002
[7]Jin H P,Wiktor P,Debra D B.An optimal thruster configuration design and evaluation for quick step[J].Control Eng.Practice,1995,8(3):1113-1118
[8]Durham W.Attainable moments for the contimined control allocation problem[J].Joumal of Guidance,Control and Dynamics,1994,17(6):1371-1373
[9]Bindel D.Six-dimensional thruster actuation and configuration design for spacecraft,AAS 07-021[R].Washington:AAS,2007
[10]唐生勇,張世杰,張育林,等.姿軌一體化控制航天器推力器構型設計[J].航天器控制,2010,28(3):20-28
Tang Shengyon,Zhang Shijie,Zhang Yulin,et al.Redundant thruster configuration design for the integrated orbit and attitude control of spacecraft[J].Aerospace Control.2010,28(3):20-28(in Chinese)
[11]Durham W.Attainable moments for the constrained control allocation problem [J].Journal of Guidance,Control,and Dynamics.1994,17(6):1371-1373
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
