30m級內河雙體浮油回收船船型優化及快速性試驗研究
2013-01-18 02:52:18袁萍黃婧
武漢理工大學學報(交通科學與工程版) 2013年6期
關鍵詞:船舶
袁 萍 黃 婧
(武漢理工大學交通學院 武漢 430063)
0 引 言
隨著國民經濟的發展,長江水上船舶密度持續增加,各類石油、化工產品的消耗量也隨之增大,運輸船舶的數量和危險貨物的運量相應大幅增加,溢油事故的發生幾率也隨之提高.
長江中型多功能溢油回收船的建設是結合《國家水上交通安全監管和救助系統布局規劃》的要求,配合沿江船舶溢油應急設備庫的建設,在轄區分散配置多艘中型多功能溢油回收船,其他區域配置小型機動收油機,依托轄區水域污染事故應急反應決策支持系統,滿足轄區水域的船舶污染防治和溢油應急反應的需要,通過組織社會各方力量,在轄區水域具備對抗100t水上溢油事故的能力.根據現階段溢油防控的迫切需求,首批船將配置在武漢海事局、江蘇海事局等轄區.
30m級內河雙體浮油回收船是為江蘇海事局開發設計的首批中型多功能溢油應急處置船,用于長江江蘇段水域船舶溢油事故的應急處置.該船為專業溢油應急處置船,當轄區內出現重大溢油事故時能夠在最快的時間內到達指定地點,作為溢油現場指揮中心,主要功能為:溢油回收、臨時儲存、應急輔助卸載和溢油圍控、消油劑噴灑等.其輔助功能為:航道溢油監視、油輪過駁監護、溢油及污染源監視監控、溢油處理裝備運送、溢油應急信息傳輸和支持溢油事故調查取證,兼顧港區內船舶油污水和垃圾回收等,也可用于溢油應急專業訓練并支持水上交通巡邏等作業.日常可作為對長江海事系統下屬支隊的工作船、艇的供油船(油類閃點>60℃).系統最大回收油能力為60m3/h,浮油回收艙艙容74m3.該船航區為長江A級航區,既要滿足25km/h的應急響應航速,又要在溢油清除作業1~4kn低速時保持穩定,同時具備良好的操縱性能.
1 主尺度及船型研究
根據工可批復及設計任務書要求,船長30 m,輕載設計吃水不超過1.5m.
水面溢油回收的最關鍵設備是收油機(撇油機),收油機在水面收集浮油的過程就是油水分離的過程.世界各國的收油機種類繁多,值得借鑒的是在上世紀90年代,美國采用完全開放式的統一招標,將各國有代表性的收油機(如堰式、盤式、刷式、帶式、真空式、繩式、動態斜面式、機械式、收油網等)在美國環保署的實驗池中,分別倒入真的各種油,模擬各種真實海況(不同流速、波浪等)進行各項性能測試比較,以選擇各項性能指標和對環境的適應性最好的溢油收油機(有定量和定性評估報告)經綜合分析,以內置式動態斜面收油機(DIP)為最佳,到目前為止世界各國已選購365套DIP收油機.DIP收油機分內置式和側掛式2種.首艘海上溢油回收船也選用了美國內置式動態斜面收油機(DIP).收油機裝在首部主體內,配有首門,收油效果較好;但為配合安裝收油機及平直的首門,首部線型較肥,航行時興波阻力較大.后續船上為了解決首部興波問題采用了側收式內置式收油機,舷側開門收油.這種內置式收油機要占用艙內一定的空間,往往在大型溢油回收船上采用.
該船船長只有30m左右,還要有70m3左右的溢油回收艙容,甲板布置及艙容都很緊張,設計航速為25km/h,弗勞德數Fr為0.395,接近過渡艇船型,興波阻力占到總阻力的65%~70%,由于排水量較大(方形系數約0.64)如果采用單體船型,長度排水量系數只有6左右,首興波阻力會很大;采用雙體船型,片體較纖瘦,長度排水量系數在8左右,從而降低首興波阻力.為此在船型選擇時對單體和雙體船型布置,內置式及側掛式等多個方案的進行了比較分析.
方案一 雙體/內置式收油機船型方案
雙體船的收油機布置在2個片體間,僅作業時降至水里,收油機不作業時可上升收藏于甲板面,維修保養方便,且不增加附體阻力.收油機不接觸江水,與船體水下結構沒有任何關系,既不影響船舶的型線設計,對船舶的快速性能也沒有任何影響[1-2].此外,雙體船的2個片體可以起到掃油臂的作用,可以有效縮短掃油臂的長度;同時,收油機作業時才需要下降接觸水面,這就有利于收油機的保養維護.
對于內河雙體船而言,其穩性、操縱性、快速性指標均較單體船為優;但是相對于單體船而言,雙體船造價略高,同樣船長的情況下,空船排水量略大,有效裝載量較小,表現在污油艙的容量較單體船方案為小.圖1為安裝在連接橋間的收油機.
方案二 單體/船首內置式收油機船型方案
本方案收油機放置在船體首部,船體首部結構需要配合收油機的使用要求作出適應性改動,并采用2扇可開閉的船艏門作為首部船體線型.在工作狀態,首門打開,收油機的掃油臂伸至水面,收油機開始進行收油工作.
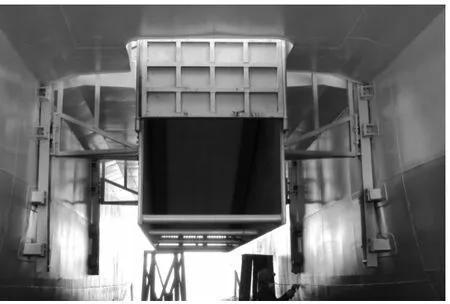
圖1 安裝在連接橋間的收油機
對本方案而言,首門的加工比較復雜,一方面必須與船體首部結構相配合;另一方面,由于加工工藝的限制,首門外型以垂直平面為主,增加了船舶首部型線處理的難度,引起較大興波阻力,影響船舶正常航行狀態時的快速性能.此外,由于制造加工工藝的限制,首門結合部位只可能做到風雨密,布置在首部的內置收油機有一部分長期浸沒在水中對收油機的使用保養也是不利的.且首部安裝收油機的部位由于開有一道槽,這就使得船舶損失了這個部位一定的排水量.
方案三 單體/內嵌式收油機船型方案
本方案的2臺收油機布置在單體船的兩舷并開有側門.相較與方案二而言,對船舶的快速性能影響小一些,相較與方案一而言,該船船體結構重量要小些.
方案二、方案三兩側船體內都要內嵌收油機,要損失一定的排水量,甲板作業面積也很緊張,雙體船的收油機布置在2個片體間,僅作業時降至水里,平時收起不與水接觸,維修保養方便,且不增加附體阻力.而單體船的收油機布置在首部(船首內置)或舷側(兩舷內嵌),船體結構上均需開門,收油機長期與水接觸,維修保養需上塢.雙體方案較單體方案有較大的甲板作業面積,船長較短經濟性較好,片體瘦削,高速時阻力較小,雙體船的操縱性及回轉性較好,2個片體能保證它有良好的航向穩定性.不足的是雙體船片體瘦削,排水量較為緊張.綜合比較后選擇雙體船型,設全回轉舵槳裝置兩套,回轉靈活,能保證低速作業航行時回轉及穩定性能.該船的主尺度及主要參數見表1.
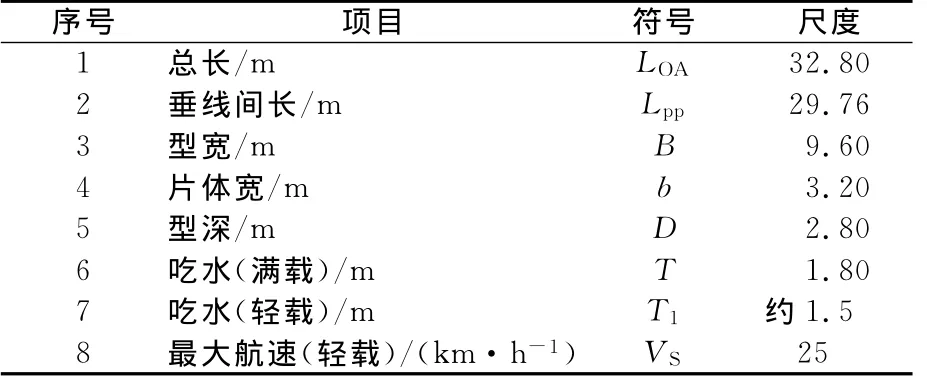
表1 主尺度及主要參數
2 船模試驗及分析研究
1)推進方式比選 該船設計航速為25 km/h,Fr為0.395,接近過渡艇船型,但作為溢油回收船,要求回收油工作航速1~4kn時穩定,操縱靈活,為此進行了多種推進方式的比選,見表2.

表2 推進方式比較
全回轉舵槳在日常管理和維護保養方面最簡單,實船業績較多,可作為首選方案[3-4].而針對于該船航速高、Fr高達0.395的情況,選用不帶導管的全回轉舵槳可能更有利于快速性能并進行了試驗比較.
2)線型優化:采用尖艏、縱流尾型. 船首線型盡量尖瘦以減小興波阻力,尾部去流段縱剖線盡量平順,使螺旋槳來流順暢.適當的浮心位置取在舯后-2.8%Lwl左右.由于航道要求吃水較淺,為保證舵槳安全使用,防止產生氣蝕和空泡,為避免全回轉舵槳工作時空氣吸入影響效率,對尾部線型進行了優化對比試驗.尾部片體線型見圖2.
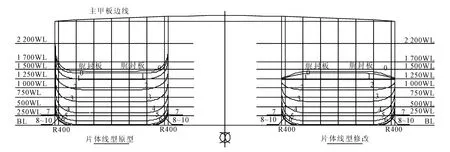
圖2 尾部片體線型
圖3 為尾部片體線型,左側片體為常規尾型,右側為優化尾型.右側7站至尾封板兩側改為逐漸向下向后形成邊整流鰭尾,防止空氣吸入并有整流作用[5-6].
優化設計方案確定后,對不同吃水、不同尾型、帶導管的全回轉舵槳和不帶導管的全回轉舵槳等船型方案的船模進行快速性試驗,試驗狀態表見表3,模型尾部帶導管的整流鰭尾型見圖3.
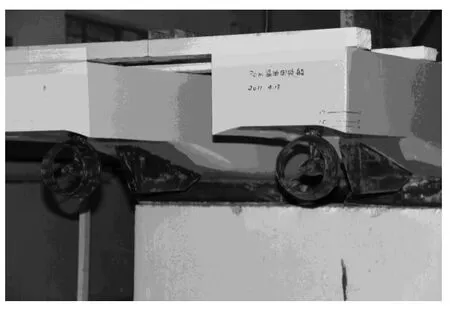
圖3 帶導管的整流鰭尾型

表3 試驗狀態表
由模型阻力換算至實船阻力時采用付汝德法(Froude’s Method),摩擦阻力系數計算采用I.T.T.C.—1957公式,其表達式為
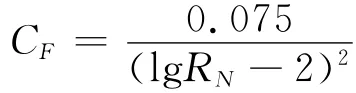
模型-實船換算摩擦阻力補貼系數取為△Cfs=0.4×10-3,所有的阻力試驗結果全部換算至標準水溫t=15℃的淡水狀態,換算結果中附加了5%的阻力貯備.附體濕表面積均計入阻力換算中.
試驗狀態4即改型的整流鰭尾型,試驗狀態5即尾部園舭常規線型;試驗狀態1和2中的全附體即帶導管和呆木,試驗狀態3是去掉呆木和舭龍骨但保留導管;試驗狀態4和5中光體是指去掉呆木、舭龍骨、導管.有效功率預報曲線見圖4.

圖4 實船有效功率曲線
從試驗結果可以看出:
1)在設計吃水1.5m時,試驗狀態4和5即尾部圓舭常規線型,光體即改型的整流鰭尾型對比:改為整流鰭尾型后,阻力沒有增加,阻力和圓舭常規線型很接近,在設計航速25km/h附近還有所下降;說明整流鰭尾不但能防止空氣吸入并且有一些整流作用.
2)帶導管的全回轉舵槳和不帶導管的全回轉舵槳阻力比較:即只保留導管的試驗狀態3和試驗狀態4與5中光體阻力相比,從阻力曲線和有效馬力值可以看出,帶導管的阻力增加了約30%,導管的設置可以提供較大推力,往往適用于中、低速船舶,功率負荷大于25的重載工況下,在較高速船上要結合操縱性和快速性能綜合考慮其適用性,可以選擇不采用導管.
綜合分析:
1)從總布置方面考慮,由于本船吃水較小,如果采用帶導管舵槳時,由于導管占據了槳葉上部空間,舵槳下緣將突出到基線以下約200mm(見圖5),這樣對航行安全不利.如果取消導管,舵槳下緣可基本處于基線附近.
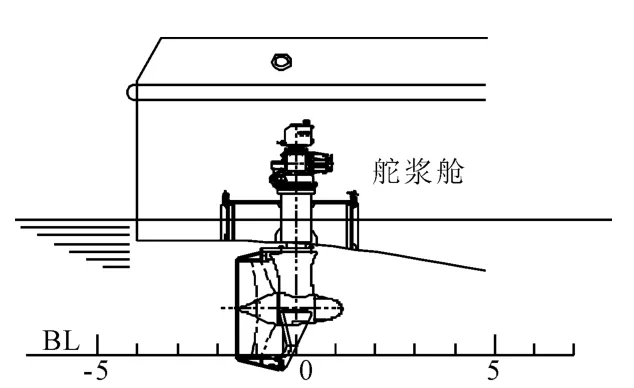
圖5
2)圖6是根據船模試驗阻力數據預報情況,由舵槳廠家提供的舵槳推力和航速預報.其曲線為本船不帶導管狀態時的船模換算阻力曲線(未考慮5%阻力附加值),以及不帶導管時的舵槳推力曲線(由肖特爾公司提供),交點處即為設計航速,約為13.65kn,再進一步考慮船模換算的5%阻力附加值,設計航速約13.5kn.
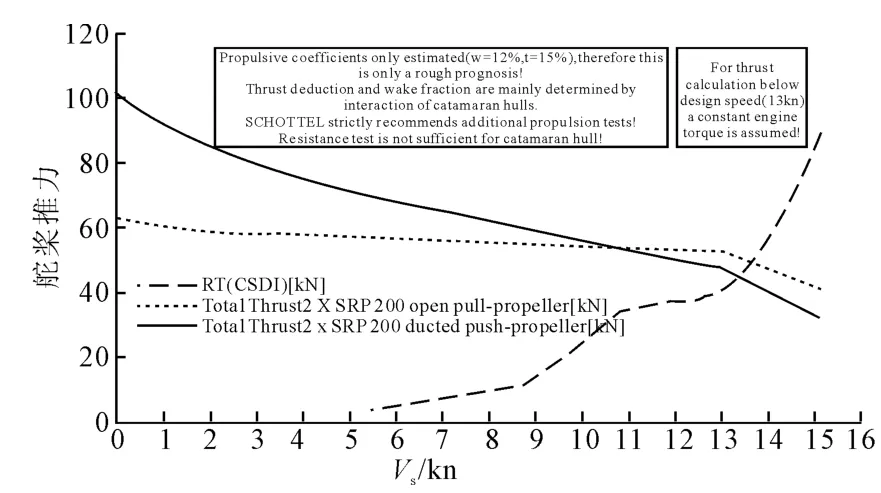
圖6 航速預報圖
3)為便于分析帶導管舵槳、不帶導管舵槳對推力的影響,將帶導管時的舵槳推力曲線(也由肖特爾公司提供)也在圖6中同時列出.(注:采用帶導管的舵槳后,由于此時的船舶阻力曲線大幅提高,曲線交點約為12.5kn,請參見圖7及圖5所示的推力曲線和有效功率曲線.
從圖7可以看出,帶導管與不帶導管相比,在低速狀態(小于10.5kn航速)時,舵槳的推力值為帶導管狀態大于不帶導管狀態;而在大于10.5 kn航速以后,舵槳的推力值為不帶導管狀態大于帶導管狀態.換言之,在高速狀態下,舵槳不帶導管時有利,船舶航速較高;而在低速狀態下,舵槳帶導管時有利.鑒于本船巡航狀態占據其使用壽命的絕對多數,從保證巡航速度、提高節能減排效果考慮,采用不帶導管舵槳是有利的.
而在低速狀態下,雖然采用不帶導管的舵槳作為推進裝置,與采用帶導管的舵槳相比,其推力有所下降,但由于本船尺度較小,且為360°全回轉舵槳,對于船舶的操縱性能的不利影響是基本可以忽略的.
4)尾型采用整流鰭尾型.
3 結論及建議
在研發設計中,在選擇雙體船型方案后,對該船的快速性能進行了研究設計,針對尾部線型優化比較、帶導管全回轉舵槳和不帶導管全回轉舵槳等不同船型方案進行了船模試驗和分析研究,從船型選擇、尾型優化及推進方式等幾個方面綜合考慮,解決了船舶裝載和布置、輕載快速性能和低速穩定操縱性等矛盾,取得了較為理想的結果,首制船各項性能指標達到設計要求.
通過發現船模試驗研究發現:
1)帶導管全回轉舵槳對航速影響較大,不采用導管時在同樣吃水條件下螺旋槳直徑可以取得略大一些,效率高一些,在相同主尺度和主機功率下,航速相差約1kn,故對航速要求較高的船舶不建議采用帶導管螺旋槳作為推進方式.
2)由于吃水較淺,為配合使用舵槳,尾部可采用邊整流鰭線型,對減小阻力,防止產生氣蝕和空泡都有好處.
3)收油機安裝在片體之間,安裝導軌處舷側應盡量設計為平行垂直段,保證導軌能安裝在船體內側,對船舶快速性能影響減到最小;雙體船對排水量的變化較敏感,所以在預估重量重心時需要力求準確,留有余量.
[1]王國強,董世湯.船舶螺旋槳理論與應用[M].哈爾濱:哈爾濱工程大學出版社,2007.
[2]陳 進.18m 航道快艇設計[J].船海工程,2012,41(2):55-58.
[3]文逸彥,楊松林,陳 鵬,等.一種三體船快速性的研究方法[J].船海工程,2011,40(6):106-108.
[4]朱文康,周建平.中國漁政33511設計探析[J].江蘇船舶,2007,24(1):55-58.
[5]王世杰.35m高速海事指揮艇設計[J].江蘇船舶,2008,25(1):24-27.
[6]浦伯良,楊 波,季培德,等.江蘇新一代內河港監艇:C系列港監艇設計[J].江蘇船舶,2001,18(2):46-49.
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:08:26
艦船科學技術(2022年14期)2022-09-22 03:07:40
機械工業標準化與質量(2022年6期)2022-08-12 02:07:42
艦船科學技術(2022年2期)2022-03-29 01:12:44
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
軍工文化(2017年12期)2017-07-17 06:08:06
中國船檢(2017年3期)2017-05-18 11:33:09
船海工程(2015年4期)2016-01-05 15:53:30