基于線控轉(zhuǎn)向車輛轉(zhuǎn)向盤扭矩預(yù)測(cè)的開環(huán)模型的實(shí)驗(yàn)驗(yàn)證
2013-02-18 08:35:40
裝備制造技術(shù) 2013年1期
(青島理工大學(xué)機(jī)械工程學(xué)院,山東 青 島 2 66033)
汽車線性轉(zhuǎn)向技術(shù)(SBW)是指應(yīng)用智能機(jī)電一體化方法來(lái)取代應(yīng)用復(fù)雜機(jī)械進(jìn)行轉(zhuǎn)向的新的一代轉(zhuǎn)向技術(shù),其取消了在轉(zhuǎn)向輪和操作員界面(通常指轉(zhuǎn)向盤)之間安裝的機(jī)械連接。線性轉(zhuǎn)向系統(tǒng)包括轉(zhuǎn)向盤總成、轉(zhuǎn)向執(zhí)行總成、力矩傳感器和轉(zhuǎn)向盤回正力矩電機(jī)四個(gè)主要部分。其工作原理是通過(guò)傳感器測(cè)量轉(zhuǎn)向盤的轉(zhuǎn)角,將駕駛員的轉(zhuǎn)向意圖傳遞給主控制器,同時(shí),主控制器反饋回來(lái)的信號(hào)產(chǎn)生轉(zhuǎn)向盤回正力矩,以提供駕駛員相應(yīng)的轉(zhuǎn)向感覺(jué)。
本文針對(duì)如何提供真實(shí)的轉(zhuǎn)向感覺(jué),如何模擬真實(shí)的路感方面做了大量的研究。提供真實(shí)的轉(zhuǎn)向感覺(jué)是線控轉(zhuǎn)向系統(tǒng)的關(guān)鍵技術(shù),本文通過(guò)模擬的方法,建立了轉(zhuǎn)向盤扭矩預(yù)測(cè)的開環(huán)模型,通過(guò)由傳感器測(cè)量轉(zhuǎn)向盤的轉(zhuǎn)角、速度等參數(shù)確定轉(zhuǎn)向盤反饋力矩。
1 研究現(xiàn)狀
提供真實(shí)的轉(zhuǎn)向感覺(jué)是SBW汽車發(fā)展過(guò)程中必須要考慮的重要因素,解決問(wèn)題的關(guān)鍵是要為SBW汽車研制力矩反饋裝置,為駕駛員提供想要的力矩感覺(jué),雖然在怎樣達(dá)到提供想要的力矩感覺(jué)這個(gè)問(wèn)題上眾說(shuō)紛紜,但是根據(jù)人體工程學(xué)的觀點(diǎn)達(dá)成的一些共識(shí),在追求SBW汽車轉(zhuǎn)向系統(tǒng)的設(shè)計(jì)策略上有著重要的意義。
現(xiàn)在面臨的挑戰(zhàn)是,如何在沒(méi)有機(jī)械連接的前提下提供給駕駛員所需的轉(zhuǎn)向感覺(jué),即怎樣反饋轉(zhuǎn)向力矩。在傳統(tǒng)的轉(zhuǎn)向系統(tǒng)中,可以通過(guò)機(jī)械連接,把轉(zhuǎn)向輪上的轉(zhuǎn)矩傳遞到轉(zhuǎn)向盤上,然而,在沒(méi)有機(jī)械連接的情況下,反饋轉(zhuǎn)向輪上的力矩就就無(wú)法解決,所以就有必要制定一些策略來(lái)預(yù)測(cè)從轉(zhuǎn)向輪子系統(tǒng)中反饋回來(lái)的力矩。現(xiàn)在有個(gè)候選方案來(lái)解決模仿常規(guī)車輛的轉(zhuǎn)向力矩感覺(jué)的問(wèn)題,就是把在轉(zhuǎn)向輪制動(dòng)器上采集到的力矩信息反饋到轉(zhuǎn)向盤系統(tǒng)上,但是,現(xiàn)實(shí)中車輛一般在比較嘈雜的環(huán)境下行駛,而在嘈雜的環(huán)境下,測(cè)量制動(dòng)器上的力矩信息是十分昂貴的。所以,在過(guò)去提出的大多數(shù)預(yù)測(cè)方案,只是使用了易于實(shí)時(shí)測(cè)量的輪胎道路動(dòng)態(tài)數(shù)學(xué)模型或動(dòng)力轉(zhuǎn)向系統(tǒng)的動(dòng)態(tài)數(shù)學(xué)模型。
2 實(shí)驗(yàn)驗(yàn)證
2.1 簡(jiǎn)述
在本文中,我們要研究的問(wèn)題是驗(yàn)證一個(gè)給定的預(yù)測(cè)轉(zhuǎn)向力矩的不確定性模型的可靠性。具體的說(shuō),我們要研究以下問(wèn)題:測(cè)量在傳統(tǒng)車輛中的鑒于離散時(shí)間的轉(zhuǎn)向力矩與車輪轉(zhuǎn)向角的之間的實(shí)驗(yàn)數(shù)據(jù)的關(guān)系,看實(shí)驗(yàn)數(shù)據(jù)是否適合這個(gè)具有給定的不確定性模型的特定實(shí)例。在傳統(tǒng)車輛中,轉(zhuǎn)向盤的轉(zhuǎn)矩感覺(jué)已通過(guò)轉(zhuǎn)向盤的轉(zhuǎn)向角與轉(zhuǎn)向盤的轉(zhuǎn)向力矩之間的磁滯曲線得到驗(yàn)證,具體是通過(guò)把實(shí)驗(yàn)數(shù)據(jù)疊加到所需的磁滯曲線上驗(yàn)證的。但是,這條曲線不包括動(dòng)態(tài)特性的扭矩感覺(jué),即沒(méi)有明確考慮扭矩隨時(shí)間的連續(xù)變化。我們的目標(biāo)就是努力解決這個(gè)問(wèn)題。
2.2 測(cè)試條件
在試驗(yàn)中使用的車輛是配備了液壓助力轉(zhuǎn)向系統(tǒng)的SUV類車,所有的測(cè)試都是在干燥的瀝青路面上和在不同的常數(shù)縱波測(cè)試條件下獲得的實(shí)驗(yàn)數(shù)據(jù)。需要說(shuō)明的是,在任何給定的測(cè)試中,縱向速度都是保持恒定的,所有的測(cè)試均假定是在司機(jī)緊緊握住方向盤的條件下進(jìn)行的。
1.3 不確定性模型的驗(yàn)證
本文所考慮的不確定性模型由一個(gè)標(biāo)稱模型和不確定參數(shù)的界限構(gòu)成。該模型在這里建立了一個(gè)從輪胎轉(zhuǎn)向角到轉(zhuǎn)向盤力矩的系統(tǒng),其在本質(zhì)上是開環(huán)的,沒(méi)有用于校正模型的關(guān)于轉(zhuǎn)向轉(zhuǎn)矩或輪胎制動(dòng)力的反饋信息。
γ為Δ的2誘導(dǎo)范數(shù)的上限;為特普利茨矩陣,可以由標(biāo)稱模型的相關(guān)知識(shí)和實(shí)驗(yàn)數(shù)據(jù)來(lái)構(gòu)造;
Tk、Yk為原始測(cè)量的濾波形式。
3 結(jié)束語(yǔ)
圖1給出了標(biāo)稱模型預(yù)測(cè)ν=60 km/h時(shí)的轉(zhuǎn)向力矩與實(shí)驗(yàn)數(shù)據(jù)的吻合程度,我們可以看出實(shí)驗(yàn)數(shù)據(jù)和模型的預(yù)測(cè)值之間存在著誤差,但根據(jù)我們的研究結(jié)果表明,當(dāng)車輛的速度在10~100 km/h或3~30 m/s,方向盤的轉(zhuǎn)向幅度在0~60°時(shí),不確定性模型沒(méi)有失效。
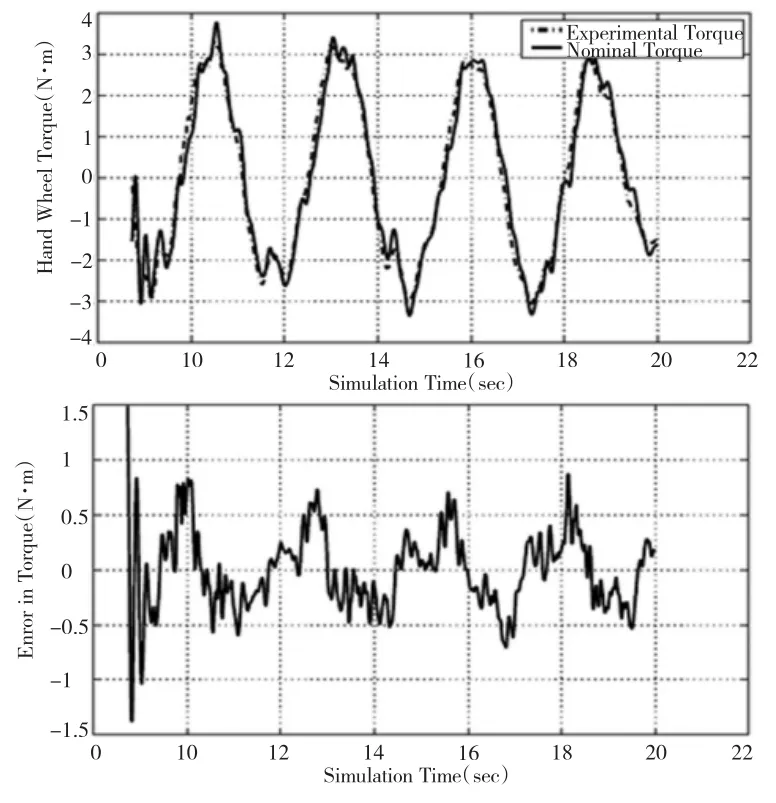
圖1 預(yù)測(cè)模型的性能圖(ν=60 km/h)
基于這些結(jié)果,可以得出結(jié)論,擬議在SBW車中使用的不確定性模型是一個(gè)很好的開環(huán)模型結(jié)構(gòu)。
[1]劉 俊.基于快速控制原理的電動(dòng)助力轉(zhuǎn)向控制系統(tǒng)的研究[D].安徽:合肥工業(yè)大學(xué),2009.
[2]杜 峰.基于線控技術(shù)的四輪主動(dòng)轉(zhuǎn)向汽車控制策略仿真研究[D].陜西:長(zhǎng)安大學(xué),2009.
[3]邱緒云,唐紹豐,曹亢子.線控轉(zhuǎn)向系統(tǒng)路感PID控制仿真研究[J].山東交通學(xué)院學(xué)報(bào),2008,(02):5-13.
[3]于秀濤,李 博.汽車線控轉(zhuǎn)向系統(tǒng)分析[J].中小企業(yè)管理與科技,2010,(10):269-270.
[4]舒欣梅,龍 駒.現(xiàn)代控制理論基礎(chǔ)[M].陜西:西安電子科大出版社,2008.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19