智能遙控新型高空救生緩降器設計
2013-02-18 08:35:44
裝備制造技術 2013年1期
(四川大學制造科學與工程學院機械制造及其自動化,四川 成都 6 10065)
高空救生緩降器是一種新型的安全逃生裝置,在高樓發生火災、地震等險情時,可以讓人們沿著繩索從樓層外面直接安全地下降逃生,避開通過樓道、電梯逃生的種種安全隱患,讓人們最大限度的保護自己并減少社會經濟的損失。同時,它也可以協助消防部隊撲滅火災,減少消防官兵在救援現場的傷亡。
目前,國內外緩降器已有多種類型,主要基于電磁阻尼、液體阻尼、摩擦阻尼和手控等工作原理。多數產品結構復雜,體積大并存在不能快速、簡單、自由調節下降速度的缺陷,使得人們在逃生過程中無法采取調速等有效措施應對下降過程中的各種突發情況。手控式緩降器雖能實現下降速度可調,但操作復雜,不適宜老人、小孩等特殊群體使用,同時大大影響了緩降器的快速往復使用。
通過詳細科學的調查分析,針對目前緩降器產品存在的缺點,設計制作了一款基于摩擦塊剎車原理的智能遙控新型高空救生緩降器。
1 總體結構和原理概述
緩降器的基本組成模塊如下圖1所示。在初始狀態下,逃生者的自重作用在鋼絲繩7上。鋼絲繩防滑機構8將重力的直線運動轉化為主軸9的轉動并防止主軸和鋼絲繩7的相對滑動。電機2預設夾緊力,在沒有遙控輸入信號,即電機2不工作的狀態下,可以保證主軸9能夠在重力作用下不轉動。在逃生者開始下降時,轉動的主軸9將離心塊10向外甩出,轉速越大離心力越大。剎車片11將離心塊向外的離心力轉化為剎車片與外殼6在圓周方向的摩擦力。當速度達到一定值時,摩擦力與重力達到平衡,此時主軸9就能保持該速度勻速轉動,實現逃生者勻速下降。當需要調速時,逃生者使用遙控器4向單片機控制系統3發送無線遙控指令,包括開始、加速、減速和停止信號。單片機控制系統3接收到調速指令,調節輸出到電機2的信號,從而控制電機的轉動。螺旋推進塊1把電機2的旋轉運動轉化為軸向移動,并利用杠桿機構放大螺旋推進塊對摩擦塊5的壓力。在電機2的調節下,摩擦塊5對剎車片11和離心塊10的側面產生一個附加的摩擦力,從而調節主軸9的轉速,實現加速、減速和空中懸停。
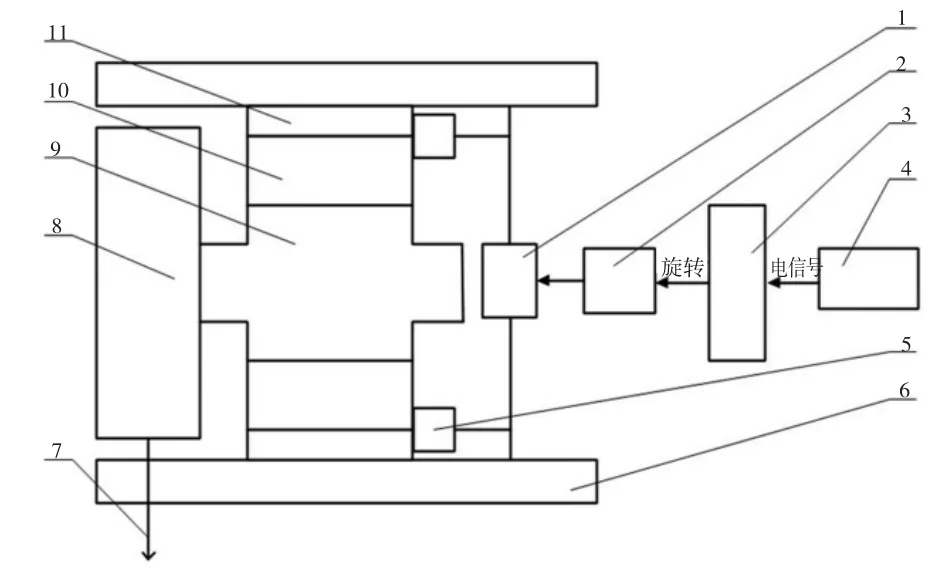
圖1 基本組成模塊
2 摩擦力減速機構
如圖2所示,機構主要由鋼絲繩夾緊機構、主軸、離心塊、剎車片和外殼組成。它的主要功能是受負載的鋼絲繩通過鋼絲繩夾緊機構將人體重力按一定比例轉化為主軸的驅動力,主軸旋轉后將離心塊和剎車片一起甩出,并與外殼產生摩擦力,從而產生與重力驅動相反的力矩使主軸減速。

圖2 摩擦力減速機構
(1)逃生者下降速度分析
離心塊為四個相同的1/4環形柱組成的空心圓柱。

其中,R2=0.04 mm、R1=0.08 mm,分別為離心塊的內外半徑;h=0.0 4 mm,為離心塊的厚度。離心塊的材料為45#鋼,密度為ρ=7.85 g/cm3,所以m=ρν=4.74 kg,則

式中,
N為離心塊在剎車片上產生的摩擦阻力;
μ=0.35為剎車片與離心塊的摩擦系數;
ω1為離心塊的角速度。
(2)當緩降器勻速運動時

由(1)、(2)、(3)式得

其中,ν為逃生者下降速度。分別取小孩質量=30 kg,成人質量=100 kg,代入(5)得:

通過以上計算可得,人體質量取最大100 kg時,下降速度為1.213 m/s,在國家規定的緩降器逃生速度安全范圍1.5 m/s內,故該設計滿足要求。
3 輔助摩擦減速機構
輔助摩擦機構的主要功能是在電機接受到控制器傳來的信號開始工作后,將電機的旋轉力矩通過螺紋旋轉化為軸向的推進力,再通過一個杠桿將軸向力放大后作用于剎車片上,提供一個輔助摩擦力。其結構如圖3所示。

圖3 電機控制減速機構
選用直流減速電機,額定電壓U=6 V,額定轉矩T=1.2 N·m。螺旋推進塊通過螺紋旋轉將電機的扭矩T轉化為水平方向的推力F。

其中,k=0.2,為扭轉系數;D=6 mm,為螺栓公稱直徑。
輔助摩擦塊對剎車片產生的壓力:

其中,n=8.5,為杠桿給軸向力的放大倍數。
輔助摩擦力產生的阻力矩為:

其中,μ=0.2,為摩擦系數,R=70 mm,為摩擦力矩。
由式(6)、(7)、(8)可得,M=119 N·m。
而100 kg的人對主軸產生的力矩為:

其中r=25 mm為鋼絲繩處主軸的半徑。因為M>M1,所以輔助摩擦減速機構能使人在半空中停下,滿足設計要求。
4 控制器設計
4.1 控制器主要功能
遙控器發送命令,控制中心進行接收和處理,通過控制輸出電流的方向來調節電機的正傳和反轉,從而控制輔助摩擦塊對剎車片和離心塊的摩擦力大小,實現加速、減速和空中懸停。
4.2 控制器工作原理
圖4為整個控制系統的流程圖。在下降過程中,通過人體本身的重力驅動緩降器主軸轉動,主軸轉動后將主軸上的離心塊向外甩出并對外殼產生摩擦力,當下降速度達到0~1.5 m/s中的某個值時,摩擦力產生的阻力矩剛好與人體重力產生的驅動力矩達到平衡,這時逃生者就能按照該速度勻速下降。逃生人員感覺下降速度太快或者太慢時,可以按遙控調速器的按鍵發送加速、減速和停止命令給控制中心,控制中心接收到命令后,驅動電機正傳或者反轉,再通過杠桿將電機的驅動力放大后推動輔助摩擦塊給剎車片施加壓力,當電機正傳時,輔助摩擦力增大,下降速度減小;當電機反轉時輔助摩擦力減小,下降速度增大,從而實現對下降速度的智能控制。
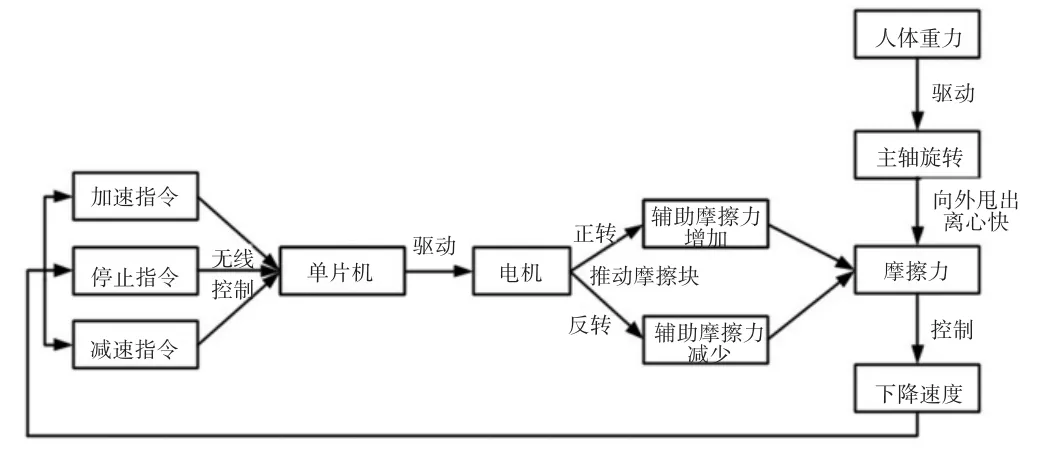
圖4 控制系統流程圖
5 第一代產品實驗測試情況
為了驗證產品性能,進行了第一代產品的樣機制作和實驗測試,得到實驗數據如下表1所列。
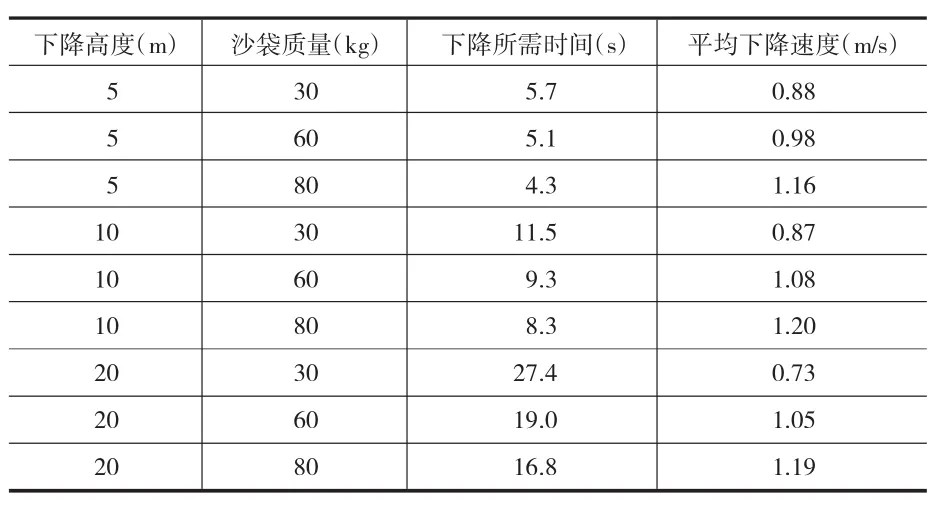
表1 第一代產品性能測試
分析表1結果可知,使用該樣機可將沙袋的下降速度控制在0.6~1.5 m/s的安全范圍內,同時通過調節遙控器可實現沙袋下降過程中的加速、減速和空中懸停。樣機滿足指標要求。
6 結束語
此款緩降器采用傳統機械結構和單片機智能控制系統結合的方式,實現逃生者根據現場實際情況的需要自由調節下降速度的功能。它結構緊湊,體積小,質量輕,安全可靠,可反復使用,可廣泛用于公眾場所,如:高層寫字樓、機關辦公樓、學校的集體宿舍、高層大型商場、醫院病房、三樓以上的賓館等。當高層建筑災難發生時,它能為人們快速逃離災難現場爭取寶貴的時間,挽救更多寶貴的生命,減少社會經濟的損失。這些優點都決定它將會有非常好的市場前景,目前該產品已獲得四川省科技創新苗子工程的項目經費資助。
[1]葉 強.液體流動阻尼式高樓逃生器的創新設計[J].消防科學與技術,2005,03(4):210-212.
[2]陳品志,等.基于直流發電機和電磁制動器的新型高樓逃生緩降器[J].制造業自動化,2010,10(下):173-175.
[3]符 煒.機械創新設計構思方法[M].湖南:湖南科學技術出版社,2006.
[4]李丙倫,等.簡易火災逃生緩降器的設計與研究[J].科技資訊,2010,8:122.
[5]鄒 平(譯).機械設計實用機構與裝置圖冊[M].北京:機械工業出版社,2007.
[6]王 杰.機械制造工程學[M].北京:北京郵電大學出版社,2004.
[7]成大先.機械設計手冊聯接與緊固[M].北京:化學工業出版社,2004.
[8]王志明,等.救生緩降器優化設計[J].機械設計與制作,2009,4:7-9.