一種岸上目標跟蹤算法
2013-03-08 06:42:16石章松董銀文肖文凱
艦船科學技術 2013年3期
石章松,董銀文,肖文凱
(海軍工程大學,湖北 武漢, 430033)
一種岸上目標跟蹤算法
石章松,董銀文,肖文凱
(海軍工程大學,湖北 武漢, 430033)
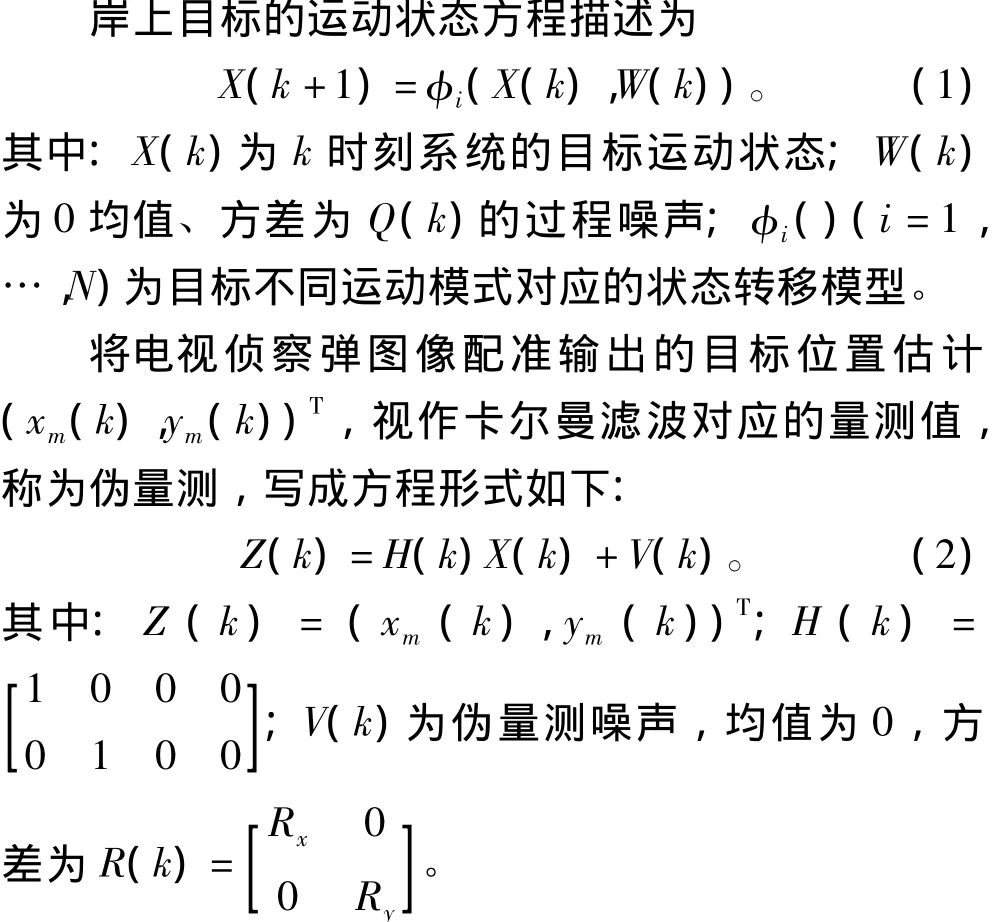
結合地面目標運動特征和地理信息之間的關系,基于圖像序列配準輸出的目標位置偽量測值,建立利用地理信息實現對岸上運動目標跟蹤的數學描述。分析岸上不同的運動模式,設計目標運動模型集,提出基于位置濾波不確定區域與道路是否相交基礎上的運動模式判別方法,給出基于運動模型動態調整的自適應濾波算法。仿真結果表明,提出的方法和算法是有效的,具有重要的應用參考價值。
電視偵察彈;數字地圖;岸上目標跟蹤;運動模型調整
0 引言
利用電視偵察彈所拍攝的圖像序列,完成岸上運動目標的定位與跟蹤,是大口徑艦炮武器系統實現對岸火力支援打擊的重要保證[1-2]。但由于圖像傳輸時延、圖像配準誤差以及目標運動的不確定性等因素,致使其跟蹤誤差較大,對運動目標的精確跟蹤是該系統很大的挑戰。但是,被跟蹤目標本身的運動特性很容易受到地理因素的影響[3]。
利用地理信息來改善跟蹤性能的文獻主要是圍繞機載空中雷達探測跟蹤系統展開研究的。其方法主要有2類:一類是地圖修正[4-5],另一類是目標動態噪聲方差調整[6]。文獻 [3]針對機載雷達對地面目標的跟蹤問題,提出了一種廣義對地跟蹤框架,采用過程噪聲水平來表征不同的目標運動水平,同時考慮了雷達探測虛警、雜波以及多目標跟蹤等諸多因素,使得濾波模型計算復雜。與雷達對地跟蹤系統相比,圖像序列具有優勢,它沒有雜波,在電視偵察彈視場內一般是對單目標進行定位跟蹤,不存在多目標跟蹤的數據處理環節,濾波算法相對來說簡單些。
1 基于數字地圖輔助修正的岸上目標跟蹤算法
1.1 問題描述
圖1 岸上目標定位跟蹤示意圖Fig.1 Schematic view of ashore target location and tracking
利用電視偵察彈所拍攝的圖像序列,完成岸上運動目標的定位與跟蹤,本質上是一個混合估計問題。混合估計系統一般是直接針對每種可能的目標運動模型建立與之相應的濾波器組,按照自適應模型辨識來選擇不同的濾波器,隨著模型數目的增多,計算量迅速增加,而且會出現“模型過度競爭”現象[3]。
1.2 目標運動模型集設計
在對岸上目標跟蹤系統中,地理信息對目標運動有一定的約束力[7],利用地理信息有可能實現模型集合的自適應精簡,從而降低目標建模的不確定性,減少濾波器數目,減小計算量。
岸上目標在沿著道路運動時,趨向于勻速或者近勻速運動[7]。當岸上目標運動到道路交叉附近點時,可能會進行機動,來改變運動狀態。當地面目標從道路外進入道路,或者從道路上離開時,也可能進行機動,來改變目標的運動狀態。
對于一個地面目標而言,一般出現強機動是在道路交叉點附近,或者在該目標從開闊地域運動到道路上,及從道路上運動到開闊地域。在開闊地域時,目標機動性也比較大,但無法確切得知何時機動,一般假設做勻速運動。而在道路上時,目標一般是做勻速運動的,當然也有機動的可能,但出現的可能性比較小。
所以一般來說,岸上目標的運動模式有5種:①沿道路運動模式,一般做勻速運動;②離開道路進入活動區域模式,做機動運動;③從活動區域進入道路模式,做機動運動;④沿當前道路轉入下一條道路模式,做圓周強機動運動;⑤在開闊區域運動模式,做勻速運動。
相對應上述運動模式,分別采取對應狀態描述模型,如表1所示。針對②類和③類運動模式,主要考慮到地面目標的機動能力受限,是一個漸變的過程,選取“當前”統計狀態描述模型[8]。
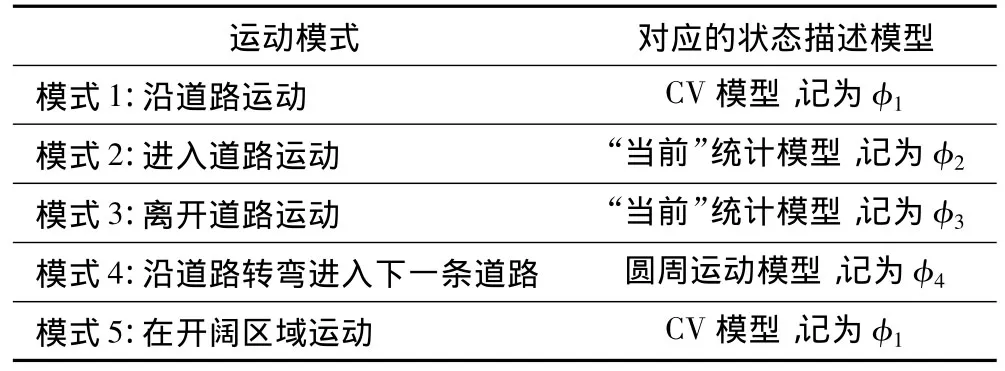
表1 不同運動模式對應的狀態描述模型Tab.1 Differentmovement patterns and corresponding state descriptionmodel
1.3 運動模式判別方法
針對岸上目標,在地形限制下,利用地理信息對上述運動模式的判別,即運動模型的自適應辨識,首選應該判斷出目標是否在道路上。
目前,文獻[4]提出了量測不確定區域判別法,文獻[6]提出了預測不確定區域判別法。在實際跟蹤系統中要確定所使用的量測,就是電視偵察彈圖像配準后輸出的目標位置估計,沒有雜波。從理論上看,位置的濾波值比預測值精度要高。本文選擇位置濾波不確定區域判別法來判斷目標是否在道路上。
位置濾波不確定區域判別法所定義的不確定區域為
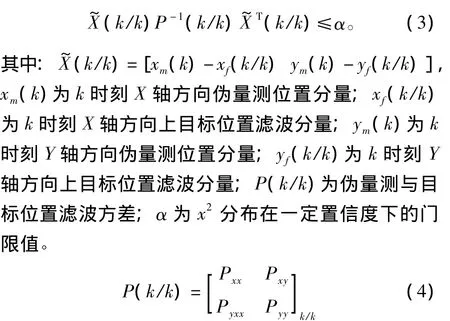
為位置濾波協方差。
如果式(3)給出的不確定區域是一個橢圓區域,如圖2所示。該不確定區域與一般道路構成的線段有交點,則判斷當前時刻目標運動在道路上,否則,認為目標不在道路上。
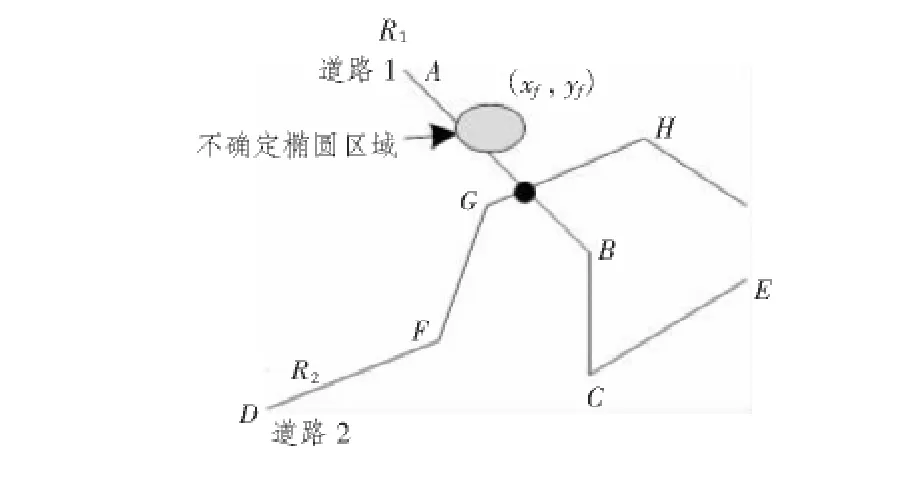
圖2 位置不確定區域與道路是否相交的判別示意圖Fig.2 Schematic view of distinguish whether it is intersecting between uncertainty area of position and road
設k-1時刻目標運動狀態為Φ(k-1),k時刻目標狀態的位置濾波為Xf(k/k)對應的協方差為P(k/k),道路集合為R,道路交叉點集合為J,道路外的地形集合為L。基于上述基本思想,下面給出模型集精簡的策略。
初始條件:Φ(0)根據目標的初始位置位于哪個地理區域,可直接給定。如果初始位置對Jj∈J滿足式(3),則認為目標在初始時刻過道路交叉點Jj。若存在多個初始關聯交叉點,取距離最近的為關聯交叉點。如果初始位置對Ri∈R滿足式(3),則認為目標在初始時刻沿著道路Ri運動。若存在多條初始關聯道路,取距離最近的為關聯道路。如果判斷初始位置在Ll∈L處,則認為目標在初始時刻在道路外的Ll處運動。
1)目標過道路交叉點,轉彎進入下一條道路的運動模式判斷
針對道路交叉點集合J,如果存在道路交叉點Jj∈J對應位置坐標,滿足式(3),則運動模型Φ(k)=φ4,j(k),即轉彎運動模型。如果同時有多個交叉點都滿足,取最近鄰的交叉點為關聯交叉點。
2)目標進入道路或者離開道路運動模式的判斷

成立,則更新Φ(k)=φ2,i(k),認為目標處于進入道路的運動模式。其中,δt為地面目標平均機動時間;如果式(7)不滿足,則認為目標處于沿著道路運動模式,即 Φ(k)=φ1,i(k)。
3)目標離開道路運動模式的判斷
如果 Φ(k-1)=φ3,i(k-1),對于有 N3次歷史判斷,有M3次不滿足式(3)所定義的不確定區域與道路Ri有交點,則認為目標已經完全離開道路。
目標離開道路的時間段為[t(k-N3)-δt,t(k)]。由于決策目標離開道路的運動是一個事后決策過程,在[t(k-N3)-δt,t(k)]時間段內,需要對目標運動模型Φ(k-1)進行再次更新,并進行重復濾波跟蹤。
4)目標道路外運動模式的判斷
若上述判斷均沒有目標運動模型Φ(k-1)的更新,則認為目標在道路外運動,其運動模型Φ(k-1)= φ1,l(k -1)。
綜上所述,其判斷次序為:首先判斷目標是否在道路交叉點;其次判斷目標是否進入道路或者沿著道路運動;而后判斷目標是否離開道路;最后判斷目標是否在道路外運動。上述判斷中,只要有一個判斷成立,則不再進行后續判斷。
1.4 算法流程
基于上述模型集設計,采取線性卡爾曼濾波計算公式[8],在給定初始狀態模型Φ(0)的基礎上,其算法流程如下:
1)首先,將電視偵察彈圖像配準輸出的目標位置估計,視作卡爾曼濾波對應的偽量測值;
2)然后,建立基于目標運動狀態模型Φ(k)的線性卡爾曼濾波,得到該時刻的位置濾波、速度濾波以及對應的位置濾波方差矩陣;
3)利用濾波值,并結合地理信息 (一般來源于電子地圖),自適應辨識出地面目標當前的運動模式,從目標先驗模型集中選擇φi(k)來更新當前運動狀態模型Φ(k),并返回第1步,再次預測。其中,對于目標從道路上離開的運動模式,因為是一個事后決策過程,需要進行濾波回溯。
1.5 仿真實例及結果分析
仿真場景如圖3所示。2條道路F(34,34)G(46,42)和H(34,46)I(44,34),2個平坦區域1和2,假設目標從區域1的A點 (34,42)起,經過B點 (35.6,44)進入道路HI,到達道路交叉點C(40,39)后,轉彎進入到路 FG,在 D點(42,40)離開道路 FG,進入區域2中的 E點(44,38),上述的坐標單位為km。
在仿真過程中,等周期獲取岸上目標的位置量測,T=1 s,蒙特卡羅仿真次數為100次。為了簡化起見,忽略道路交叉點、道路和道路外地形的差異性,并且系統方程和量測方程按照上述選擇,均為線性的。量測噪聲誤差協方差陣為R/dial(1002,1002),dial(·)表示對角陣;對應的速度過程噪聲均方差σx=σy=3 m/s。其目標運動真實參數如圖4~圖6所示。

圖4 目標真實軌跡與有誤差軌跡示意圖Fig.4 Schematic view of target true trajectory and error trajectory

圖5 目標運動真實參數變換示意圖Fig.5 Schematic view of targetmotion with true parameter transform

圖6 目標運動有誤差參數變換示意圖Fig.6 Schematic view of targetmotion with error parameter transform
在轉彎段ω=1.5 m/s,加速過渡段加速度因子α=0.05。經過100次蒙特卡羅仿真后,其濾波均方差統計平均結果如圖7和圖8所示。
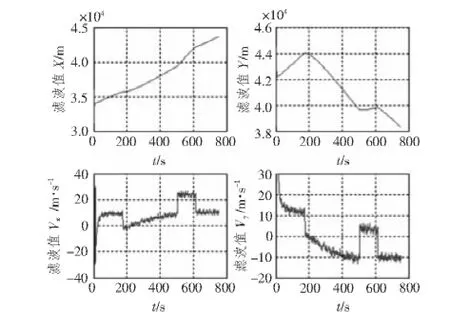
圖7 目標運動參數濾波值Fig.7 Filter value of targetmotion parameter
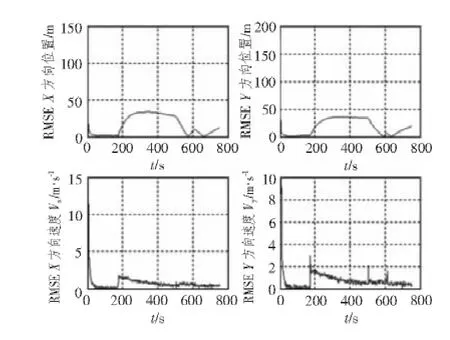
圖8 均方差誤差曲線圖Fig.8 Graph ofmean square error
從計算結果可以看出,當目標運動到B點、C點和D點前后,即目標行駛至道路交叉點并進行強機動時,濾波方差顯著增大,跟蹤性能下降明顯。采用運動模型調整后,在道路交叉點處的濾波方差雖然也出現了顯著變大的情況,但其濾波均方差峰值較小,特別是在目標速度參數估計上,跟蹤性能得到較大改善,主要原因是:在目標進入道路或者離開道路以及目標過道路交叉點時,利用了道路信息進行模式判別,優化了機動模型的選擇,使得目標運動參數濾波效果具有更好的性能。
2 結語
一般來說,利用電視偵察彈來實現對岸上運動目標的定位與跟蹤,在技術上存在很大的困難。本文結合地面目標運動特征和地理信息之間的關系,建立利用地理信息的實現對岸上運動目標跟蹤的數學描述,分析了岸上不同的運動模式,設計了目標運動模型集,提出基于位置濾波不確定區域與道路是否相交基礎上的運動模式判別方法,給出了基于自適應模型辨識的卡爾曼濾波流程,仿真結果表明,該算法可以改善岸上低速運動目標的跟蹤精度,在技術上是可行的,其方法具有一定的應用參考價值。
[1]李開龍,石章松,龔馳,等.大口徑艦炮多發同時彈著射擊效力分析[J].艦船電子工程,2011(9):31-33.
LIKai-long,SHIZhang-song,GONG Chi,et al.Analysis of time-on-target fire effectiveness of large caliber naval gun[J].Ship Electronic Engineering,2011(9):31 -33.
[2]周建中,王海川,李敏.圖像匹配技術在對岸火力支援中的應用[J].火力與指揮控制,2006,31(9):1-3.
ZHOU Jian-zhong,WANG Hai-chuan,LIMin.Applications of imagematching to seacoast fire support[J].Fire Control and Command Control,2006,31(9):1 -3.
[3]楊峰,潘泉,梁彥,等.利用地理信息的廣義對地跟蹤研究[J].系統工程與電子技術,2005,27(8):1475 -1480.
YANG Feng,PAN Quan,LIANG Yan,et al.Research on general ground target tracking based on terrain information[J].Systems Engineering and Electronics,2005,27(8):1475 -1480.
[4]KECC,LLINAE J.Literature survey on ground target tracking problems[EB/OL].Research Project Report,Center for Multisource Information Fusion,State University of New York at Buffalo,http://www.infofusion.buffalo.edu/reports/CMIF-3 -99%20final%20report.pdf,1999.
[5]PITMAN B,TENNE D.Tracking a convey of ground vehiclee[EB/OL].Research Project Report,Center for Multisource Information Fusion,State University New York at Buffalo,http://www.infofusion.buffalo.edu/reports/Dr.%20T%20Singh%20Reports/tenne_groundtracking.pdf,2002.
[6]KIRUBARAJAN T,SHALOM Y,PATTIPATI K R,et al.Ground target tracking with variable structure IMM estimator[J].IEEE Trans.on Aerospace and Elect ronic Systems,2000,36:6 -46.
[7]劉剛,潘泉,張洪才.電子地圖在邊掃描邊跟蹤偵察系統中的應用研究[J].控制與決策,2003,18(1):103 -105.
LIU Gang,PAN Quan,ZHANG Hong-cai.Application of electronicmap in track-while-scan surveillance-system[J].Control and Decision,2003,18(1):103 -105.
[8]石章松,劉忠,等.目標跟蹤與數據融合理論及方法[M].北京:國防工業出版社,2010.91 -96.
An ashore target tracking algorithm
SHIZhang-song,DONG Yin-wen,XIAOWen-kai
(Naval University of Engineering,Wuhan 430033,China)
According to the relationship between the ground target motion characteristics and geographic information,based on the false measurement value of target position output by image sequence registration,the mathematical description on the ashore movement target tracking by using geographic information is established.The ashore variousmotionmodes are analyzed.The targetmotionmodel collection is designed.The distinguish method of movement pattern based on whether it is intersecting between uncertainty area of position filter and road is presented,and the adaptive filter based on the dynamic adjustment ofmotionmodel is provided.The simulation results show that the proposed method and algorithm are effective,and have important reference value for application.
TV reconnaissance shot;digitalmap;ashore target tracking;adjustment ofmotion model
TP279
A
1672-7649(2013)03-0106-05
10.3404/j.issn.1672-7649.2013.03.024
2012-08-31;
2012-09-27
國家自然基金(11202239)
石章松(1975-):男,博士,教授,研究方向為目標定位跟蹤、信息融合及艦載武器協同控制。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
核科學與工程(2015年4期)2015-09-26 11:59:03
電測與儀表(2015年5期)2015-04-09 11:30:52
