激光對準快速反射鏡控制系統的設計
2013-03-10 11:17:50彭樹萍王偉國于洪君
激光技術 2013年4期
關鍵詞:設計
彭樹萍,王偉國,于洪君
(中國科學院長春光學精密機械與物理研究所,長春130033)
激光對準快速反射鏡控制系統的設計
彭樹萍,王偉國,于洪君
(中國科學院長春光學精密機械與物理研究所,長春130033)
為了校正激光發射設備中激光對準光路的偏差,設計了一種激光對準快速反射鏡控制系統。采用步進電機作為驅動,控制快速反射鏡在互相垂直的兩個方向進行運動,校正激光光路的偏差,達到了精確控制激光光路的目的。對激光對準快速反射鏡的工作原理和設計過程進行了詳細闡述,并利用對準控制機箱等硬件設備對軟硬件設計進行了實驗驗證,取得了較好的實驗數據。結果表明,快速反射鏡控制系統在小角度工作范圍內方位誤差和俯仰誤差均方根都小于1″,即控制精度小于1″。該系統能夠很好地控制快速反射鏡進行2維運動,軟件設計和硬件設計都是正確可靠的,能夠滿足激光對準控制系統精確控制激光光路的要求。
激光技術;快速反射鏡;對準控制;步進電機
引 言
隨著激光武器的發展,人們對激光器發射精度的要求越來越高。在激光發射設備中,包含了大量的激光器件、光學元件和組件。在復雜光學系統中,需要將光學元件放置在幾個平臺上,各平臺之間允許有一定的相對運動,但要求全系統共軸[1]。如在高能激光技術中,激光器和光束發射系統分別位于兩個平臺上,當兩個平臺相對運動時,要求兩個平臺上的光學元件實時共軸。目前,國內外都有激光自動對準方面的研究,很多采用壓電陶瓷驅動式快速反射鏡精確控制光束實現激光的自動對準[2-4]。而壓電陶瓷驅動式快速反射鏡成本較高且驅動電壓大,因此作者所在單位采用自行研制開發的快速反射鏡,用步進電機作為驅動。為此,本文中研究了一種激光對準快速反射鏡控制系統來控制該快速反射鏡調節激光發射系統的光路,實現自動對準。激光對準快速反射鏡控制系統的主要作用是控制快速反射鏡繞兩個互相垂直并相交的軸旋轉,可以對光束方向進行實時、動態的修正,實現由靜態對準到動態監測和校正的轉變[5-7],精確控制激光發射方向。
1 設計原理
1.1 工作原理
激光對準控制系統由光束監測系統、CCD、合束鏡、激光器、快速反射鏡控制系統等組成。激光對準控制系統原理如圖1所示。激光器發出的激光經快速反射鏡反射后到達合束鏡,通過鍍膜實現將入射激光的99.5%反射,將入射激光的0.3%透射[8-9]。透射光經衰減片后到達CCD成像鏡頭,并在其上成像。光束監測系統通過監測CCD像點的位置,可實現對激光器發出的光束方向的高精度監測。快速反射鏡控制系統根據光束監測系統給出的光束偏差量控制快速反射鏡運轉,從而達到校正激光光路的目的。為了防止激光光斑在CCD相面上飽和,可以根據需要選擇合適的衰減片[10-12]。

Fig.1 Principle of laser autocollimator control system
激光對準快速反射鏡控制系統的原理如圖2所示。激光器發射激光后,激光進入光路監測系統中,根據光路監測系統給出的光路偏差量控制快速反射鏡在兩個互相垂直的方向上運動,然后判斷光路偏差量是否為0,即光路是否已經對準,如果沒有對準,則繼續進行控制快速反射鏡運動,否則結束控制。
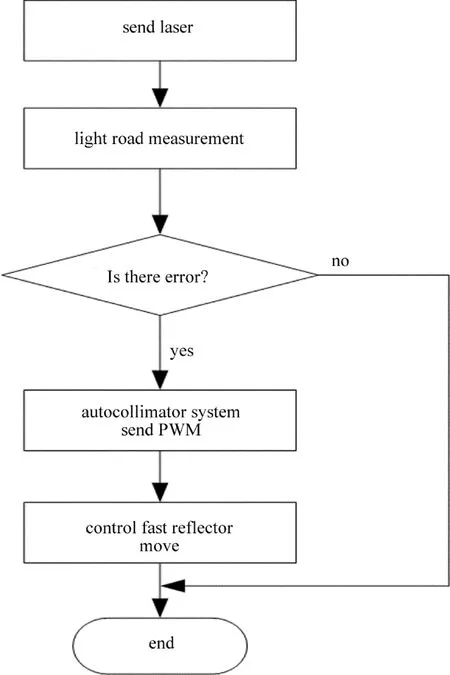
Fig.2 Principle of control system of fast reflector
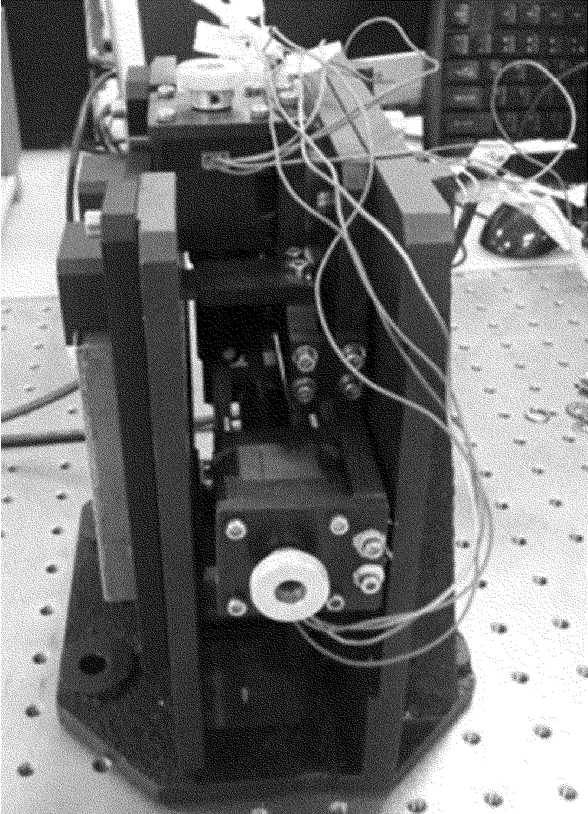
Fig.3 Mechanical structure of fast reflector
激光對準控制系統中的快速反射鏡采用作者所在單位自行研發設計的鋁質鍍膜兩維反射鏡,其機械結構如圖3所示。快速反射鏡機構通過方位、俯仰兩個直線步進電機分別帶動方位和俯仰楔塊移動,經過楔形摩擦副使快速反射鏡分別繞方位、俯仰兩個旋轉軸轉動。
根據快速反射鏡機構原理,楔塊在垂直方向的移動量和步進電機步長之間的數學關系可由下式表示:

式中,β為楔塊的楔角,β=4°;H為楔塊在垂直方向的移動量;t為步進電機步長,t=0.003048mm。計算得到H=2.13×10-4mm。
因此,根據快速反射鏡回轉半徑R和楔塊在垂直方向的移動量H,就可以算出快速反射鏡控制系統的分辨率V,見下式:
本設計中采用的快速反射鏡回轉半徑R= 5mm,可以計算出V=0.58″,即快速反射鏡控制系統的分辨率為0.58″,滿足對準控制系統分辨率的要求。
1.2 工作范圍
激光對準控制系統中選定的CCD攝像機型號為Basler公司的PIA24000攝像機,它的主要參量如表1所示。
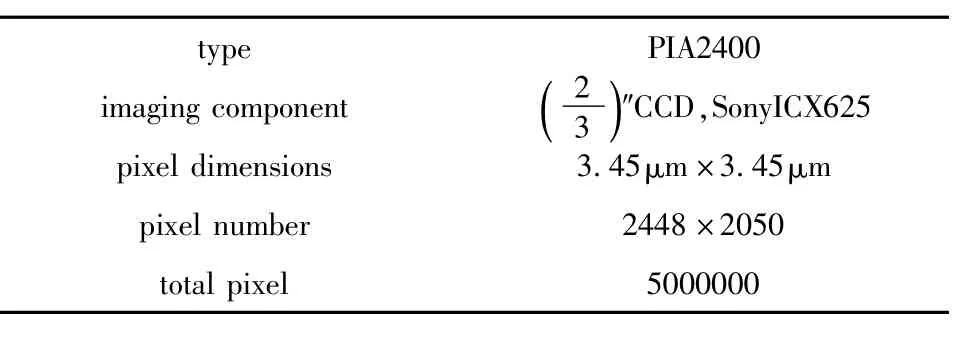
Table 1 Main parameters of CCD
由表1可知,PIA24000型CCD攝像機像元尺寸為3.45μm×3.45μm,像素為2448(水平)×2050(垂直)。
激光對準控制系統中CCD前端的光學系統焦距f=250mm;經過計算可知,CCD相機方位視場角為1.94°,俯仰視場角為1.62°。
根據快速反射鏡在激光對準控制系統中的位置,快速反射鏡轉動γ角度,則對應返回CCD的光線轉動4γ角度。
因此,若要保證返回CCD的光線不超出CCD視場,則計算得出反射鏡的方位轉角范圍為±14.6′,俯仰轉角范圍為±12.1′。
2 設計過程
2.1 硬件設計
激光對準快速反射鏡控制板的主要性能參量如表2所示。

Table 2 Main capability parameters of the circuit board of fast reflector control system
激光對準快速反射鏡控制系統的硬件組成原理如圖4所示。
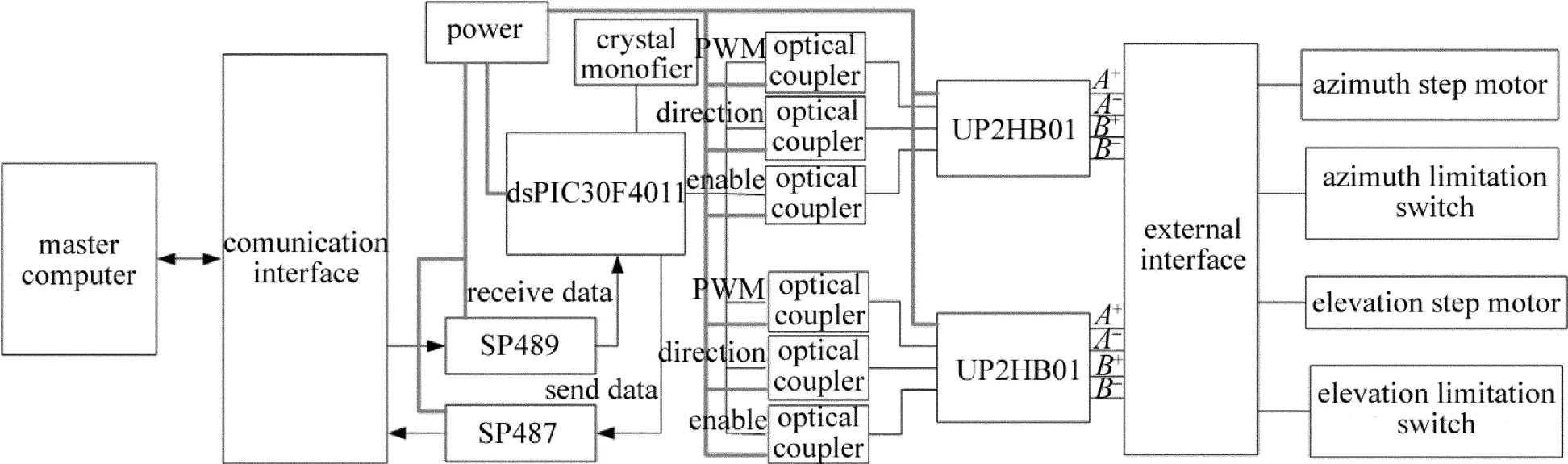
Fig.4 Principle of the hardware of fast reflector of control system
對準控制硬件系統采用dsPIC30F4011作為控制芯片,對其進行外圍電路的擴展。由于快速反射鏡需要在方位和俯仰兩個方向上運動,因此采用兩個步進電機進行控制。對準控制板上擴展了兩路步進電機驅動模塊,分別驅動方位步進電機和俯仰電機。
步進電機驅動采用UP2HB01芯片,并采用光耦進行信號隔離,提高抗干擾性。采用SP489差分接收芯片和SP487差分發送芯片擴展422通訊接口,與主控計算機進行通信。外部接口包括方位步進電機接口、俯仰步進電機接口、方位限位開關接口、俯仰限位開關接口。對準控制系統采用的是兩相直線式步進電機。
整個系統工作時,由dsPIC30F4011發送脈寬調制(pulse width modulation,PWM)信號、方向信號和使能信號給方位步進電機驅動模塊和俯仰步進電機驅動模塊。步進電機驅動模塊的輸出信號分別是A+,A-,B+,B-,它們分別控制步進電機的A相和B相繞組,進而控制步進電機轉動。通過改變PWM輸出頻率來控制步進電機運行速度,通過改變方向信號來控制步進電機正向和反向運轉,通過改變使能信號控制步進電機運動和停止。本設計中選用的步進電機是兩相直線式步進電機,它的型號是35H4N-05-122,主要技術參量如表3所示。

Table 3 Technical parameters of step motor
2.2 軟件設計
快速反射鏡控制軟件主程序流程如圖5所示。主控計算機根據對準監測系統的測量值進行判斷是否已經對準,將控制命令發送給快速反射鏡控制系統。快速反射鏡控制軟件接收到主控計算機發送的控制命令后進行解包處理。然后進行判斷,如果是電機正轉命令,則輸出PWM波控制電機正轉,如果是電機反轉命令,則輸出PWM波控制電機反轉,如果是電機停轉命令,則停止輸出PWM波,使電機停止。最后將對準控制信息包括限位開關狀態信息、故障信息等發送給主控計算機。
3 實驗驗證
為了驗證該激光對準快速反射鏡控制系統的軟件和硬件設計的正確性,設計開發了一個對準控制機箱,該機箱內部組成如圖6所示。對準控制機箱內部包括:電路板電源、電機電源、通訊板、快速反射鏡控制板及對外接口。
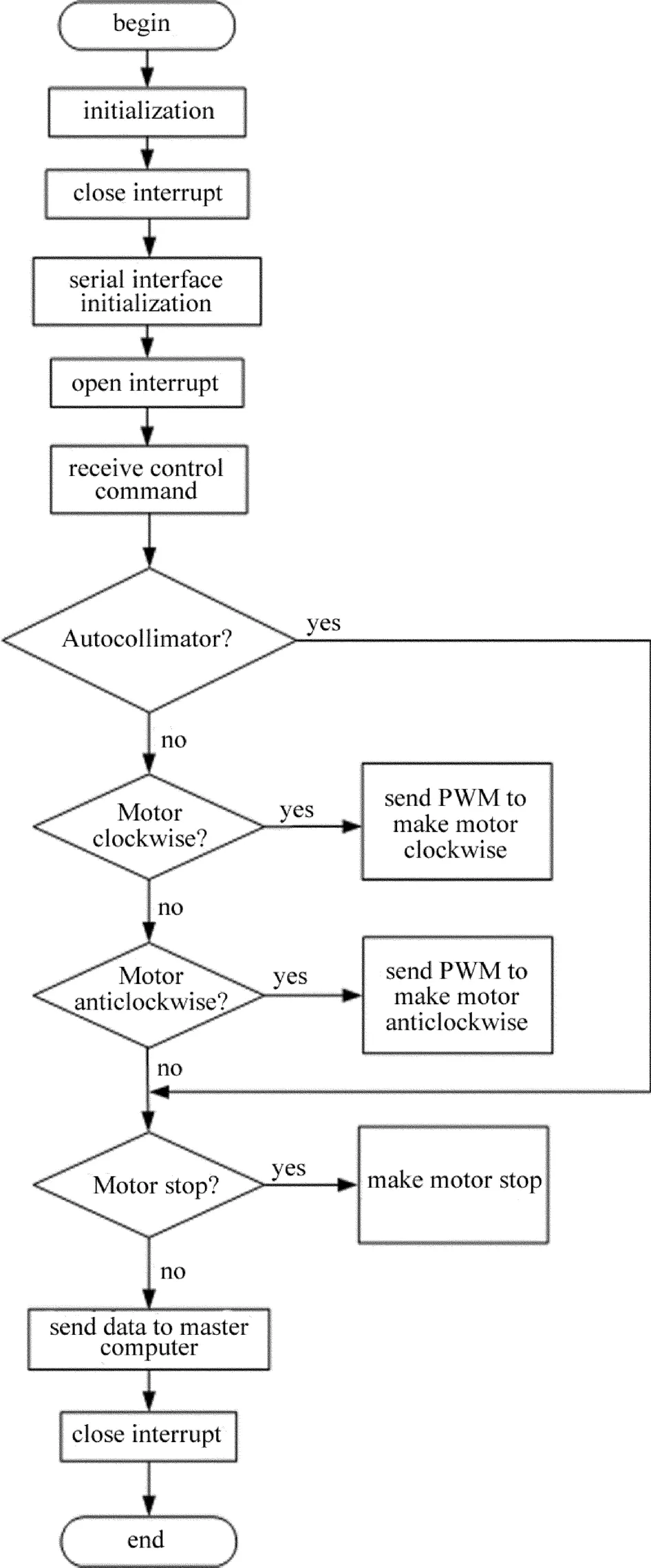
Fig.5 Flow chart of themain software procedure of fast reflector control system
對準控制機箱的前后面板如圖7所示。對準控制機箱的前面板有3個開關和3個接口。3個開關分別是電源開關、方位開關和俯仰開關。方位開關和俯仰開關分別控制方位電機和俯仰電機的運動方向。3個接口分別是方位電機接口、俯仰電機接口和通信接口。機箱的后面板只有一個電源接口,該接口負責給整個機箱供電。
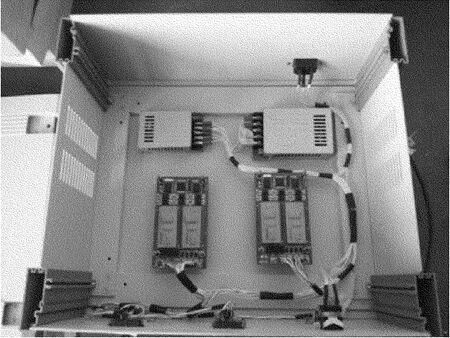
Fig.6 Insidesetupofautocollimatorcontrolbox
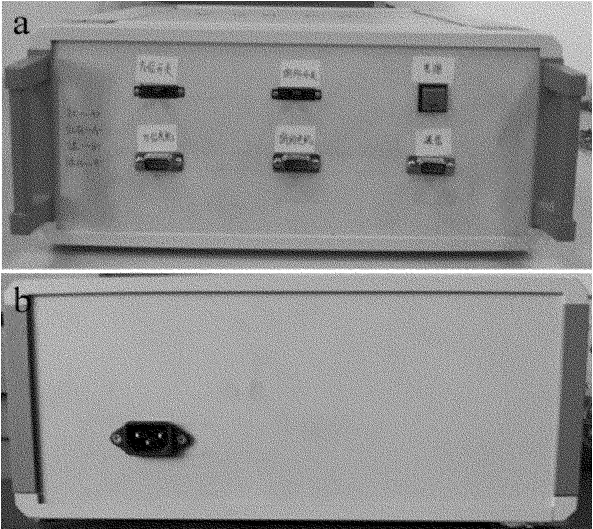
Fig.7 Frontandbehindimagesoftheautocollimatorcontrolboxa—thefrontimageofautocollimatorcontrolbox b—thebehindimageof autocollimatorcontrolbox
利用對準控制機箱對快速反射鏡控制系統的硬件和軟件進行實驗驗證。實驗設備主要包括:快速反射鏡、對準控制機箱、主控計算機、0.01″數顯自準直平行光管等。快速反射鏡控制系統實驗的硬件連接示意圖,如圖8所示。
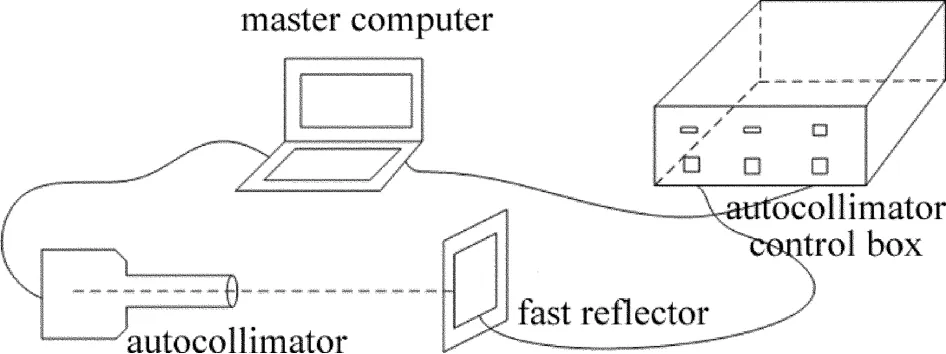
Fig.8 Trialhardwareconnectionofthetrialoffastreflectorcontrolsystem
將該機箱方位電機接口連接快速反射鏡方位電機,俯仰電機接口連接俯仰電機,通信接口連接主控計算機。機箱通電后,打開電源開關,分別撥動方位開關和俯仰開關,可以看到方位電機和俯仰電機按照設定方向運動。將方位開關和電機開關撥到中間位置,兩個電機都停止運動。然后通過主控計算機發送控制指令給對準控制機箱,對準控制機箱將根據控制指令內容對快速反射鏡的方位和俯仰進行控制,并且能夠判斷是否到達限位位置,如果到達限位位置則使電機停轉,同時將信息反饋給主控計算機,否則繼續運動。快速反射鏡的運動通過數顯自準直平行光管觀測。將主控計算機指定的值作為理論設定值,自準直平行光管觀測數據作為實際值,得到的實驗數據如表4所示。
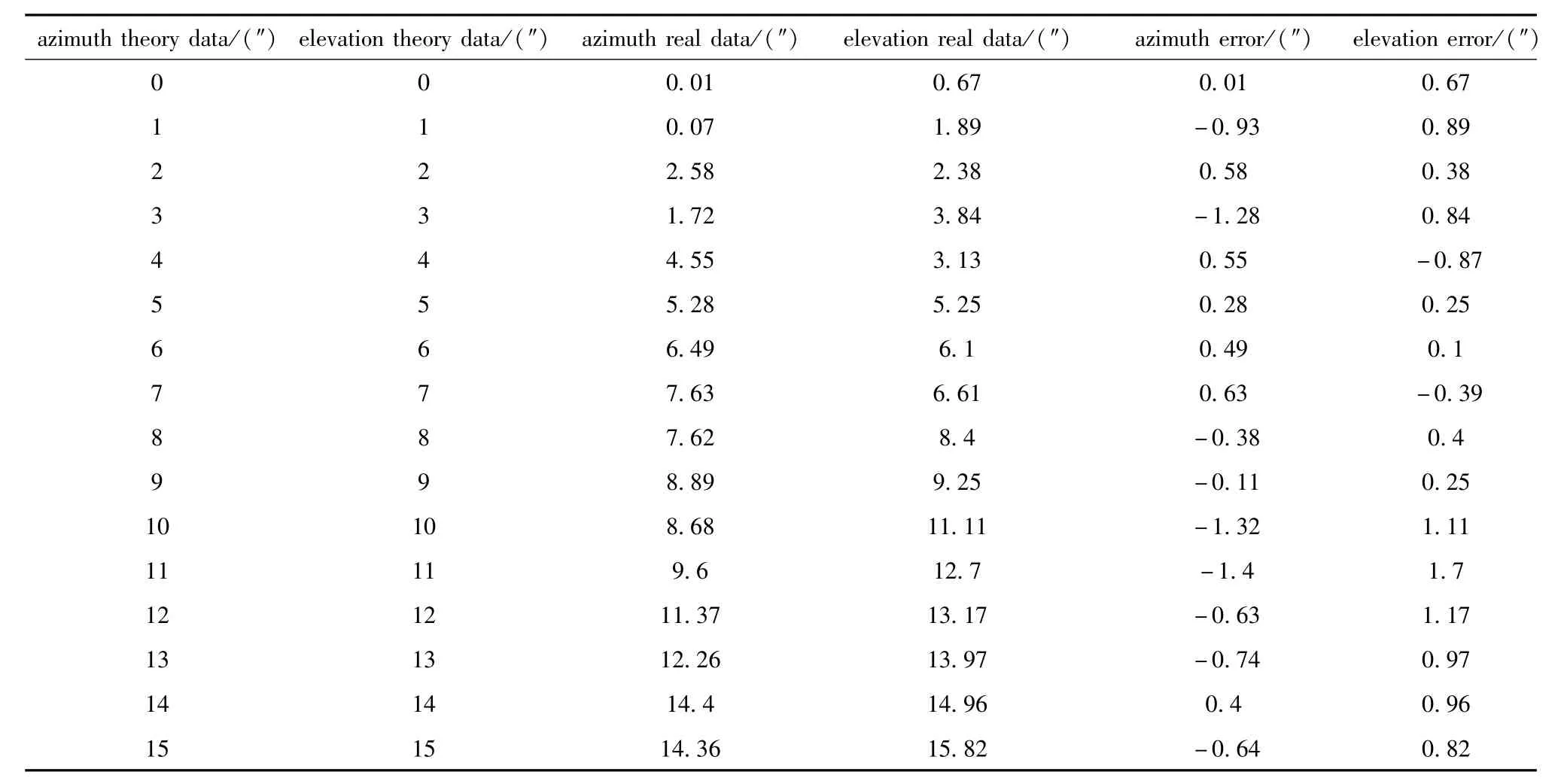
Table 4 Trialdata
根據表4可知,方位軸系的誤差均方根為0.73″,俯仰軸系的誤差均方根為0.63″,控制精度均小于1″。從表中可以看出,快反鏡在小角度轉動范圍內,控制精度基本不受轉動范圍大小的影響。由于在前面第1.1節中分辨率的計算公式中將快速反射鏡轉動所對應的小圓弧用直線近似等效,快反鏡轉動范圍越大,這種近似所引起的誤差就越大,導致控制精度隨之降低。但是在激光對準控制系統中,所需的工作范圍通常較小,因此轉動范圍對控制精度影響較小。控制系統誤差主要來源于將步進電機的步數轉換為角度的過程及機械結構上存在的誤差,平行光管的測量誤差也是誤差來源之一。根據實驗結果可以得出結論:快速反射鏡在小角度范圍內工作時,控制精度小于1″。實驗證明,該快速反射鏡控制系統的軟件設計和硬件設計都是正確可靠的,且能夠滿足激光對準控制系統的要求。
4 結 論
設計了一種激光對準快速反射鏡控制系統,并且詳細闡述了該激光對準快速反射鏡控制系統的硬件設計和軟件設計。通過自行設計開發的對準控制機箱對該快速反射鏡控制系統進行了實驗驗證。實驗結果表明,快速反射鏡控制系統的硬件和軟件均符合設計要求,能夠很好地控制快速反射鏡在方位和俯仰兩個方向上運動,在小角度工作范圍內時方位軸系和俯仰軸系的誤差均方根都小于1″,即控制精度小于1″。該系統能夠很好地校正激光對準光路的偏差,有效提高了激光發射設備的激光發射精度,有著非常重要的研究意義和應用前景。
[1]WU Q Y,WANG Q,PENG Q,et al.Wide bandwidth control of fast-steeringmirror driven by voice coilmotor[J].Opto-Electronic Engineering,2004,31(8):16-18(in Chinese).
[2]DING K,HUANG Y M,MA JG,et al.Error adaptive feedforward composite control of fast-steering-mirror[J].Chinese Journal of Lasers,2011,38(7):1-6(in Chinese).
[3]DENG Y Ch,JIA JY,CHEN GM,et al.Precision tracking system with a fast steeringmirror in vibration environment[J].Laser&Infrared,2008,38(1):11-13(in Chinese).
[4]GUAN B L,JIA JY,ZHU Y M.Hign-speed tracking strategy for three-axis photoelectric tracking system in whole space[J].Journal of Xi’an Jiaotong University,2012,46(2):76-82(in Chinese).
[5]GE B Zh,LüQ N,ZHANG Y M.Particle digital in-line holography with spherical wave recording[J].Chinese Optics Letters,2003,1(9):517-519.
[6]DING K,HUANG Y M,MA JG,et al.Composite control of faststeering-mirror for beam jitte[J].Optics and Precision Engineering,2011,19(9):1994-1998(in Chinese).
[7]XU F F,JIM,XIE J,et al.Application of FSM in high accuracy line-of-sight stabilization system[J].Journal of Applied Optics,2012,33(1):9-13(in Chinese).
[8]YSH SS,HSU P L.Analysis and design of integrated control for multi-axismotion systems[J].IEEE Transactions on Control Systems Technology,2003,11(3):375-382.
[9]XIE Y,VILATHGAMUWA D M,TSENG K J.Robust adaptive control of a three-axismotion simulator with state observers[J].IEEE/ASME Transactions on Mechatronics,2005,10(4):437-448.
[10]HUANG L,HU D J,WU H P.Analysis ofmilitary optical-tracking servo control technology[J].Ship Electronic Engineering,2011,31(7):175-180(in Chinese).
[11]ZHANG L X,LINW M,LIAO Zh J,etal.Research of algorithm to correct direction drifts of laser beam[J].Laser Technology,2012,36(3):386-389(in Chinese).
[12]XIA J T.Automatic collimation controlling technology of photoelectrity detecting system[D].Nanjing:Nanjing Univevsity of Information,2008:1-3(in Chinese).
Design of a control system of fast reflector in a laser autocollimator
PENG Shu-ping,WANGWei-guo,YU Hong-jun
(Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Sciences,Changchun 130033,China)
In order to revise the light-route deviation of a laser autocollimator,a fast reflector control system of fast reflector in laser autocollimator control was designed.By adopting a step motor as power element,the movement of fast reflector in 2-D way was controlled,the light-route deviation of laser was eliminated and the light route of laser could be controlled accurately.The hardware and software of the fast reflector control system were expatiated exactly.Using hardware such as the laser autocollimator control box,the hardware and software design of laser autocollimator control system were validated.The experimental results show that root-mean-square of both azimuth errors and elevation direction errors are less than 1″when the working range of the fast reflector system is small,that is to say,the precision of fast reflector control system is less than 1″.Fast reflector control system can control the movement of fast reflector in 2-D way exactly.The hardware and software of the design is correct and reliable.The fast reflector control system can satisfy the demand of the laser autocollimator control system.
laser technique;fast reflector;autocollimator control;step motor
TP23
A
10.7510/jgjs.issn.1001-3806.2013.04.004
1001-3806(2013)04-0431-06
國家自然科學基金資助項目(61205143)
彭樹萍(1984-),女,碩士,現主要從事光電對抗及伺服控制技術的研究。
E-mail:pengshuping666@126.com
2012-12-17;
2012-12-31
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04