透明臺階的白光干涉測量方法研究*
2013-03-20 04:30:16耿東鋒何英杰蘇宏毅
光學儀器 2013年6期
關鍵詞:測量
耿東鋒,何英杰,蘇宏毅
(1.中國空空導彈研究院,河南 洛陽 471009;2.紅外探測器技術航空科技重點實驗室,河南 洛陽 471009)
引 言
隨著微制造技術的發展,對于物體表面形貌的檢測越來越有必要,各種測試技術也相應發展起來。非接觸式光學掃描由于不接觸被測物體表面,并且測量范圍大、測量所需時間短等優點而得到廣泛的應用[1]。Veeco NT3300三維光學輪廓儀就是一種非接觸式表面測量設備,它的垂直掃描干涉模式利用白光干涉原理,通過對光程差的調制,從而在零光程差的位置獲得最大的條紋干涉對比度,通過相應的算法來重構出被測表面的輪廓,可以用來測量臺階高度和表面粗糙度[2-3]。在利用它對透明臺階進行測量時,由于白光會透過透明體,涉及到二次反射產生附加的光程差,導致了較大的測量誤差。本文針對這種情況,結合設備測量原理,分析了誤差產生機理,并提出了解決方法。
1 白光掃描干涉法原理
白光光源的輻射包含了整個可見光譜區域的光譜成分,為連續光譜。發生干涉時,各波長將產生各自的一組干涉條紋。當光程差(OPD)等于零(零級條紋處)時,各波長的零級條紋完全重合,隨著光程差及干涉級數的增加,各波長的干涉條紋彼此逐漸錯開,這種錯開會使條紋對比度逐步下降,而到一定程度時干涉條紋消失。
依據白光干涉長度較短的特性,如果使干涉條紋移動,并使其掃描整個被測表面,那么對于被測表面上的任意一個采樣點,只有處在零光程差位置時,干涉條紋調制度最大。
Veeco NT3300的VSI測量模式是利用白光掃描干涉方法測量出物體表面的三維輪廓。采用Michelson干涉裝置,利用步進馬達的進給,實現物鏡與被測物體表面距離的變化,從而實現對光程差的調制,最后依據白光干涉的特征,采用質心法提取最佳干涉位置(零光程差),最后獲得各點的相對高度,從而重構表面三維輪廓,完成對樣品的非接觸式測量[4]。
對于白光干涉,干涉條紋光強值可表示為:

上式中,I0為背景光強;γ(Z-Z0)為干涉條紋包絡線函數,稱為光源相干度;λ0為光源的平均波長;Φ0為初始相位;Z0是參考鏡與焦點的距離;Z是被測表面反射點與焦點的距離;光程差ΔZ=(Z-Z0),其中干涉條紋調制度γ(Z)可近似寫為:

從式(2)可以看出,γ(Z)在光程差為零(ΔZ=0)處達到最大,并以此為對稱軸。
從式(1)、式(2)可知,干涉條紋的光強呈余弦規律變化,干涉條紋的光強值用CCD相機檢測并記錄下來。物鏡在Z軸通過焦點的移動過程中,CCD相機記錄所有像素點的光強值,在所有圖像中取其中某個像素點的光強值,可以得到該點的光強隨ΔZ變化的白光干涉光強相干圖,圖1所示為白光干涉信號。
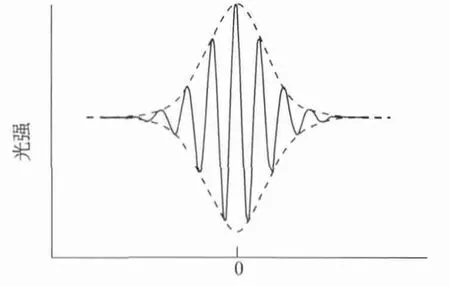
圖1 白光干涉Fig.1 Interference of white light
2 測量方法和結果
在探測器芯片制造過程中,光刻膠BP218經過曝光、顯影、烘烤后,形成光刻圖形。由于工藝要求,需要獲得該膠體的厚度,利用輪廓儀進行測量,測量區域選擇芯片中間的劃片線,可以把它看成一個相對白光透明的臺階。在測量的過程中,設定不同的掃描長度,發現與利用接觸式臺階儀測量結果的誤差較大,表1是用兩種測量儀對同一個透明臺階進行測量得到的測量值。
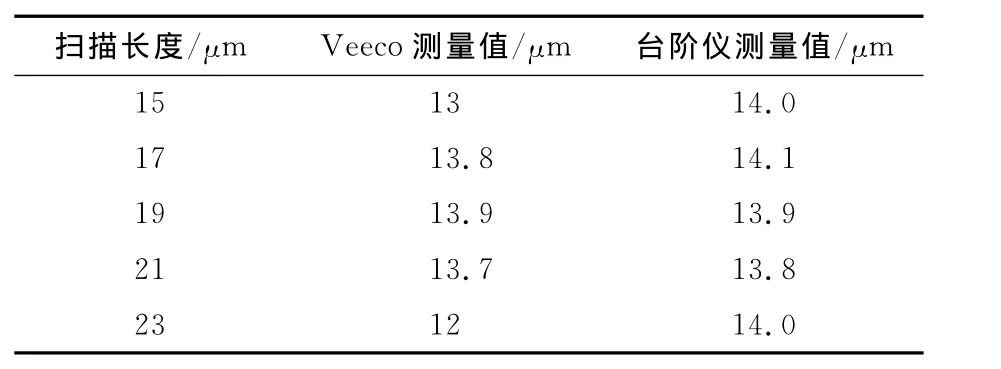
表1 測量結果比較Tab.1 Comparison of measuring results
3 測量過程分析
對于所測量的劃片線區域,如圖2、圖3所示,在對該臺階進行測量過程中,隨著物鏡的向下移動,首先在臺階上表面出現零光程差,然后物鏡繼續向下移動,會在基底的表面也出現零光程差,整個過程中,CCD記錄所有采樣點的光強值。
當在基底表面形成零光程差以后,系統應該結束測量,物鏡就不再向下移動。而控制物鏡在Z軸移動的范圍,是由測量開始之前測量參數的設定而決定的。通過設置以焦點為基準,向上和向下掃描長度,控制物鏡在Z軸移動,使樣品不同高度的測量點都會出現零光程差位置。圖4為掃描長度的設定。
在對臺階的測量過程中,測量光束覆蓋整個測量區域,包括雙面臺階的兩個表面,白光透過光刻膠后,在膠與基底的界面反射,也會與參考光路之間形成光程差。
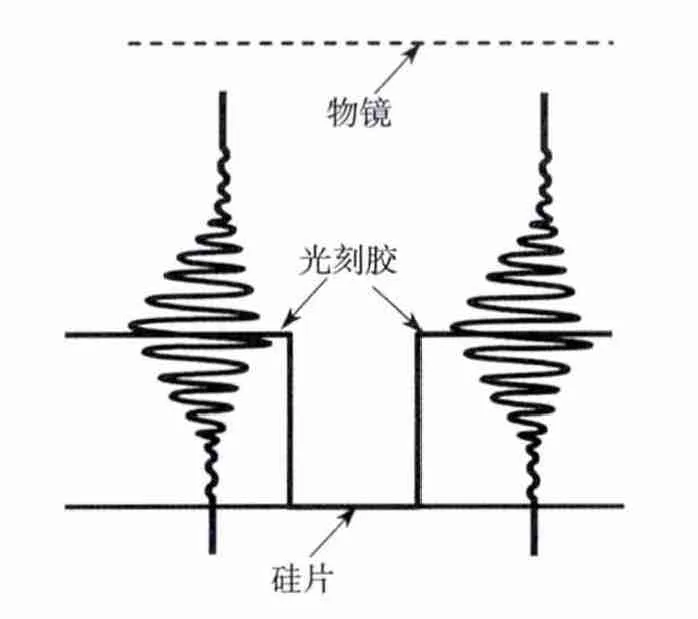
圖2 臺階上表面處于零光程差位置Fig.2 The position of step upper surface

圖3 硅基底表面處于零光程差位置Fig.3 The position of Si upper surface
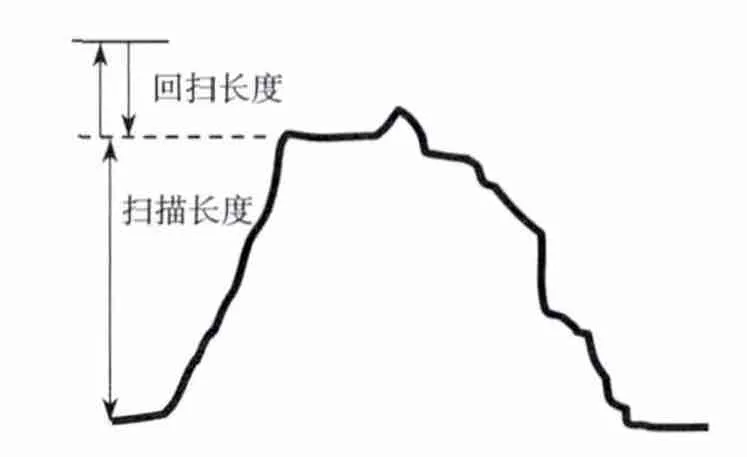
圖4 掃描長度的設定Fig.4 The enactment of scan length
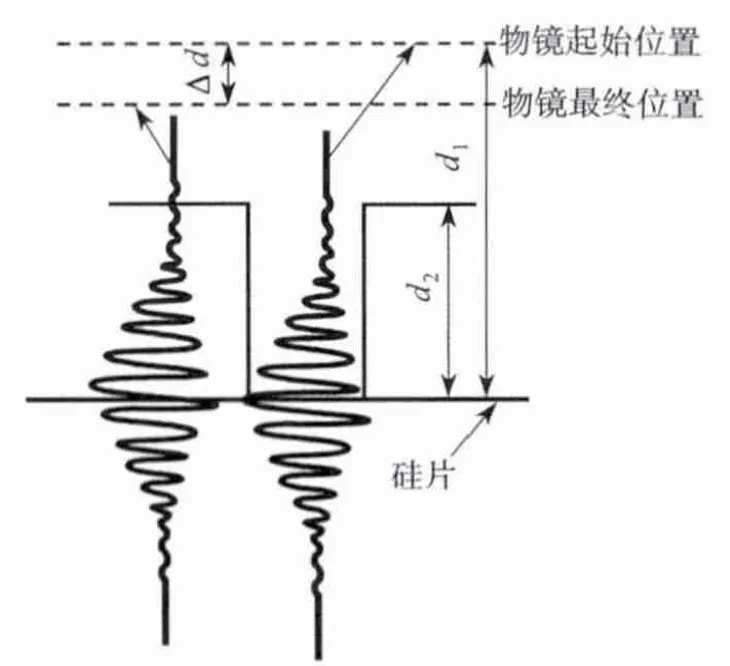
圖5 臺階下表面處于零光程差位置Fig.5 The position of step lower surface
當經過物鏡的移動,基底表面處于零光程差位置,這時ΔZ=n0d1-n0L=0,其中n0是空氣折射率,d1是被測點與物鏡之間的幾何距離,L是參考鏡與物鏡之間的距離,它是一個定值。而這時,膠與硅基底界面處,由于光線反射所產生的光程差為:

其中n1為光刻膠的折射率,d2為光刻膠的幾何距離。因為n1>n0,所以ΔZ≠0,該界面沒有處于零光程差位置。
如果物鏡繼續向下移動Δd,當滿足下面這個條件時:ΔZ=n1d2+n0(d1-Δd-d2)-n0L=0,即當Δd=(n1/n0-1)d2+d1-L時,光刻膠與基底界面處于零光程差位置,出現了明亮的干涉條紋,而CCD也會記錄該面上的光強值。
物鏡在透明臺階底部出現干涉條紋(第二次零光程差位置)后,繼續向下移動而在膠體與基底的界面再次出現干涉條紋(第三次零光程差位置),如圖6所示。
系統在進行數據處理時,會將兩次記錄的光強值疊加到一起。作為臺階上表面的光強值,由于出現第二次干涉條紋后物鏡又向下移動Δd,則系統認為該界面是在基底以下的位置,在高度重構時,形成誤差,使測量值小于真實值。
4 問題解決
測量誤差是由于物鏡在出現第二次干涉條紋后繼續向下掃描造成的,所以可以設定物鏡向下掃描長度,使系統在出現第二次干涉條紋后停止掃描。這個掃描長度在滿足透明臺階所有點都經歷過零光程差位置的前提下,不會產生由于透明臺階和基底界面上的反射引入的干擾光強。
在對透明臺階的測量過程中,首先要進行幾次預測量,在掃描過程中觀察干涉條紋的變化。當干涉條紋從臺階上表面出現,隨后在硅片上再次出現后,如果物鏡繼續向下移動,直至在透明臺階與基底界面再次產生干涉條紋,說明該掃描長度設定值過大,需要減小掃描長度設定值。通過幾次修正設置,直至最后確定一個合適的掃描長度,確保在出現第二次干涉條紋后,系統結束掃描。一般這個設定值是所測量距離的1.2倍,表2是通過設置合適的掃描長度得到的測量值。
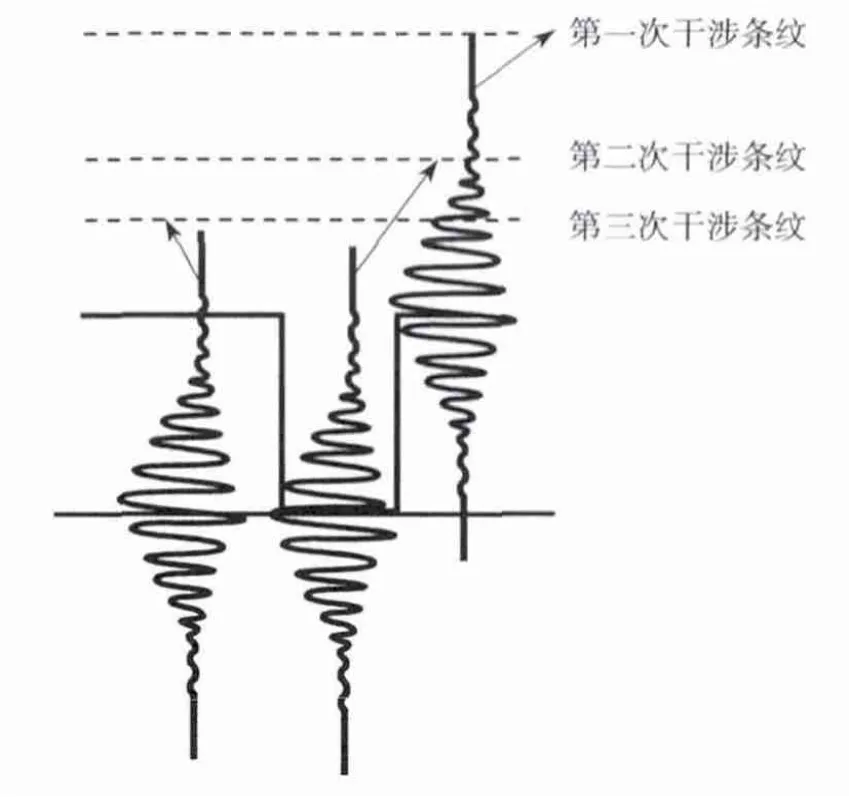
圖6 多次干涉條紋出現的位置Fig.6 The position of interference fringes
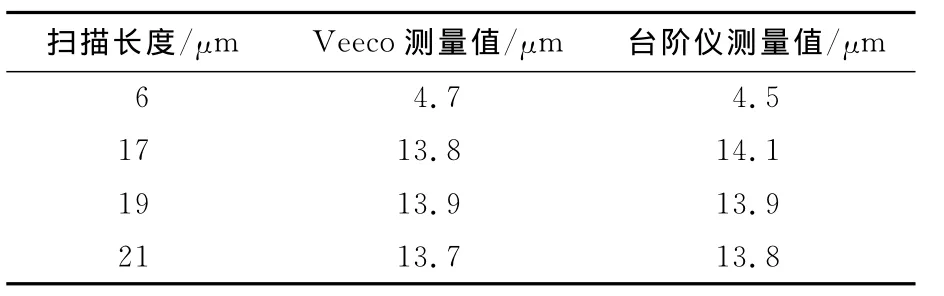
表2 測量結果比較Tab.2 Comparison of measuring results
5 結 論
針對在透明臺階測量中,出現測量誤差較大的現象,經過分析,是由于測量光路在透明臺階與基底交界面處發生了二次反射,形成了零光程差,從而引入了誤差光強,導致了測量誤差。通過設置合適的掃描長度,測量誤差減小,獲得了可信的測量結果,滿足了測量要求。這種測量方法也拓寬了輪廓儀的使用范圍。
[1]尚 妍,徐春廣.光學非接觸廓形測量技術研究進展[J].光學技術,2008,34:216-217
[2]徐德衍,林尊琪.光學表面粗糙度研究的進展與方向[J].光學儀器,1996,18(1):32-37
[3]徐德衍,林尊琪.光學表面粗糙度研究的進展與方向(續)[J].光學儀器,1996,18(2):35-41
[4]孫艷玲,謝鐵邦.基于垂直位移掃描工作的表面輪廓綜合測量儀[J].湖北工業大學學報,2005,20(5):125-127
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00