液壓傳動程序電氣控制經驗設計法優化分析
2013-03-20 08:34:26廖傳林李維楊
機床與液壓 2013年8期
廖傳林,李維楊
(1.武漢軟件工程職業學院,湖北武漢430205;2.武漢長印集團,湖北武漢430022)
在程序電氣控制系統中,通常采用串級法設計電氣控制回路,這是由于串級法不僅有章可循,而且電氣回路便于閱讀。但是在液壓系統中,由于液動的工作壓力很大,電控回路的主控元件通常都是一些沒有記憶功能的普通電磁換向閥,當執行元件的動作步驟過多時,為了滿足生產工藝要求,這些普通電磁換向閥的受電時間有時很長,甚至跨越了串級法設計中的多個級,給串級法設計帶來了很多不便,所以在設計液動程序電控系統的電氣控制回路時,經驗法通常也是一種行之有效的方法。下面對經驗法設計中遇到的具體問題和可優化設計的具體方法予以討論。
1 經驗法設計中常見的問題
對于多執行元件組成的具有多個動作步驟的液動程序電控系統,采用經驗法設計電氣控制回路時,通常先參照動作步驟的順序,繪制出“位移-時間步驟圖”。有了“位移-時間步驟圖”,不僅可以清晰地知道完成每一個動作步驟的電磁換向閥的得電需求,而且也可以知道在動作步驟切換過程中觸擊的發信元件以及這些發信元件的發信點和工作狀態。于是,根據電磁換向閥的得電需求和發信元件的工作狀態,就可以繪制出各動作步驟的“控制狀態時序邏輯圖,同時,依托經驗,可將各動作步驟的“控制狀態時序邏輯圖”轉換或者復制成各動作步驟的“控制電路”。最后,根據系統的具體工作狀態和各動作步驟的相互關系,再對串接起來的各動作步驟的“電氣控制回路總圖”進行適當的安全和優化處理[1]。
然而,在采用經驗法設計電氣控制回路的過程中,會遇到兩個非常突出的問題:
(1)因為多執行元件的動作步驟重復交叉,所以在不同的步序線上,會出現各個發信元件發出的控制信號完全相同的現象。也就是說,在需要起觸發動作的步序線上,無論觸發信號與該步序線上處于發信狀態的其他信號怎樣組合(通常相“與”),都會在兩條步序線上有相同的控制信號出現,這必然會在兩條不同的步序線上產生不能允許的重復動作或誤動作,發生因信號復現形成的干擾。
(2)當某一主控線圈的受電需求確定之后,不僅會遇到長短不同的各種啟動信號,而且還會遇到能滿足得電需求的多種關斷信號與啟動信號組成的多種控制方式,因此需要一定的設計經驗進行擇優處理。
2 常見的問題優化處理方法
2.1 采用干擾隔離法處理因信號復現形成的干擾
在經驗法設計中,為了便于觀察和處理在不同的步序線上有無各發信元件發出的控制信號完全相同的現象,通常可將各發信元件在各步序線上的工作狀態用數字標注出來,有控制信號 (也即處發信狀態)為1,無控制信號為0,并稱之為“步序線控制信號總圖”。例如,在液壓系統中,A缸、B缸和C缸的動作步驟為則它們的“步序線控制信號總圖”如圖1中“位移-時間步驟圖”下部(即a0~c1 橫排數字)所示。

圖1 引入隔離繼電器前的“步序線控制信號總圖”
圖1中,在2號步序線和4號步序線上,所有控制信號的動作狀態完全一樣 (即a0、a1、b0、b1、c0、c1 都為0、1、0、1、1、0),所以當運行到第4步時,需要利用c0 啟動B-,但是,無論c0與4號步序線上處于發信狀態的其他控制信號(a1,b1)怎樣組合,在2號步序線上都會有相同的信號組合提前出現。這就是說,在步序線2 上,會提前啟動B-,這顯然干擾和破壞了程序動作的正常運行。
為了阻止這種干擾現象,通常在后面起觸發動作的4號步序線上引入一個隔離繼電器,隔離繼電器的啟動信號是3號步序線上的c1,關斷信號是5號步序線上的由隔離繼電器組成繼電器自保持電路,將4號步序線覆蓋。圖1中引入了隔離繼電器K1 后,其“步序線控制信號總圖”如圖2所示。

圖2 引入隔離繼電器后的“步序線控制信號總圖”
在圖2中,4號步序線上有了新的處于發信狀態的控制信號K1 后,就可以將4號步序線上的啟動信號b0 和控制信號K1組成2號步序線上沒有的信號組合(即將b0與K1 串聯起來,組成“與”門電路,作為新的啟動信號),從而可避開因兩條步序線上的控制信號完全相同而引起的因信號復現形成的干擾。
需要指出的是,系統引入了隔離繼電器之后,隔離繼電器除了可隔離干擾信號外,在系統中常用來代替發信元件(如圖2中的c1),作為其他動作步驟的控制信號(啟動或關斷信號)使用。
2.2 利用經驗控制方式滿足主控線圈的得電需求
(1)當啟動信號比主控線圈的得電需求時間短,通常會有兩種控制方式:
①當有一控制信號發生在主控線圈得電需求的關斷時序線上,則可用該控制信號的動斷 (常閉)觸點作為關斷觸點,組成繼電器自保持電路[2]。其“控制狀態時序邏輯圖”和可復制出的“控制電路”如圖3所示。

圖3 關斷觸點繼電器自保持電路
②當有一控制信號發生在啟動信號動作之前,結束在主控線圈得電需求的關斷時序線上時,則可用該控制信號的動合(常開)觸點作為關斷觸點,組成變異的繼電器自保持電路。其“控制狀態時序邏輯圖”和可復制出的“控制電路”如圖4所示。
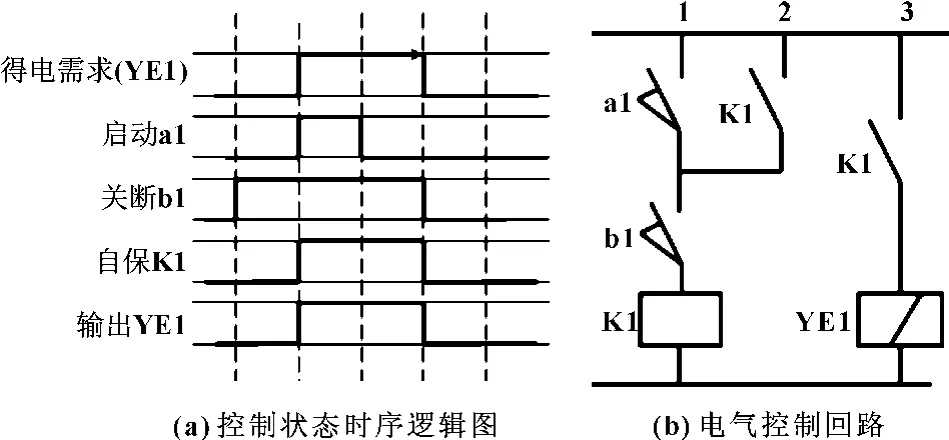
圖4 關斷觸點變異的繼電器自保持電路
圖4中,控制電路的邏輯表達式為:YE1=K1=(a1+K1)·b1。
(2)當啟動信號與主控線圈的得電需求時間相同(即主控線圈的得電需求是啟動信號的全集)時,則可采用是門電路。其“控制狀態時序邏輯圖”和可復制出的“控制電路”如圖5所示。

圖5 門電路時序圖和電控回路
圖5中,控制電路的邏輯表達式為:YE1=a1。
(3)當啟動信號比主控線圈的得電需求時間長,通常會有3種控制方式:
①當有一控制信號發生在主控線圈得電需求的關斷時序線上,且該控制信號的延長時間能覆蓋啟動信號長于主控線圈得電需求的多余部分時,可用該控制信號的動斷(常閉)觸點與啟動信號組成變異的與門電路。其“控制狀態時序邏輯圖”和可復制出的“控制電路”如圖6所示。

圖6 變異與門電路時序圖和電控回路
②當圖6中的控制信號不能覆蓋啟動信號長于主控線圈得電需求的多余部分時,則需要引入一關斷繼電器自保持電路。該短控制信號可作為關斷繼電器的啟動信號,在得電需求啟動信號結束后的位置找關斷繼電器的關斷信號,用關斷繼電器的動斷 (常閉)觸點取代圖6中的b1。其“控制狀態時序邏輯圖”和可復制出的“控制電路”如圖7所示。

圖7 關斷繼電器的變異與門電路時序圖和電控回路
③當有一控制信號發生在啟動信號動作之前,結束在主控線圈得電需求的關斷時序線上(即主控線圈的得電需求是啟動信號與關斷信號的交集)時,可用該控制信號的動合(常開)觸點與啟動信號組成與門電路[3]。其“控制狀態時序邏輯圖”和可復制出的“控制電路”如圖8所示。

圖8 動合(常開)觸點與啟動信號組成的與門電路
圖8中,控制電路的邏輯表達式為:YE1=a1·b1[4]。
3 結論
設計液動程序電控回路時,對于由多執行元件組成的液壓系統來說,在長期的生產實踐過程中,采用干擾隔離法處理因信號復現形成的干擾問題是完全可行和可靠的,采用經驗法擇優處理主控線圈得電需求的控制問題不僅比較方便也是行之有效的。
【1】朱凌宏.基于PLC的液壓驅動式機械手動作設計[J].機床與液壓,2011,39(6):79-80,104.
【2】齊占慶,王振臣.電氣控制技術[M].北京:機械工業出版社,2002.
【3】閻石.數字電子技術基礎[M].北京:人民教育出版社,1981.
【4】廖傳林.液壓傳動與氣動技術[M].北京:化學工業出版社,2012.
猜你喜歡
動漫界·幼教365(大班)(2021年4期)2021-05-23 21:33:16
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文周刊·小學一年級版(2016年28期)2017-06-03 00:28:49
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
