2D圖形引擎中的平面多邊形內外點判別
2013-03-21 05:34:50楊玉婷康厚良
圖學學報 2013年3期
楊玉婷, 康厚良
(云南大學旅游文化學院,云南 麗江 674100)
在2D圖形引擎中,可見性判定的主要目的是對于給定的場景和觀察視點,通過對遮擋關系進行快速判斷,丟棄大量不需要繪制的圖形對象,從而降低場景的復雜程度,增加整個場景的真實感,最終實現低負荷繪制和網絡傳輸[1-3],因此,是一個非常重要的問題。另外,不論是2D對象,還是3D對象最終都將被渲染到顯示屏上,由于顯示屏的大小是固定的,因此,不是場景中的所有可見部分都可以在顯示屏中顯示出來,需要根據顯示屏的尺寸對場景中的可見部分進行裁剪,即屏幕裁剪[4],如圖1所示。通過圖像流水線處理后的可見部分可能是一個或若干個多邊形,所以在屏幕裁剪過程中,一般是先找出多邊形和屏幕邊界的交點,然后通過連接各邊界點從而確定屏幕中的可見部分[5]。在一些特殊情況下,屏幕可能部分甚至全部位于待判定多邊形內,此時則需要對屏幕各頂點與待判定多邊形的內外關系進行判斷,因此點與多邊形內外關系的判斷在2D圖形引擎中很重要。

圖1 屏幕裁剪
點與多邊形內外關系的判斷算法很多,常見算法包括射線法[6]、叉積判斷法[7]、多邊形方向法[8]、基于端點和交點編碼法[9]、鏈碼表及多邊形特征形法[10],以及基于單調性的相關邊法[11]等等。結合2D圖形引擎的特點和流行的內外點判別算法給出了在DirectX平臺上使用VC++實現的平面多邊形內外點判斷算法,并將其應用于實際的2D圖形引擎中。通過具體實例證明,該算法能實時的對點和多邊形的內外關系進行較好的處理,并將裁剪后的多邊形渲染到屏幕上。
1 算法的數據結構
在計算機圖形學中提及的多邊形一般多指簡單多邊形,并且規定多邊形沿逆時針方向時為正,沿順時針方向時為負。
為了方便多邊形內外點判斷算法的實現,首先設計適當的數據結構存儲多邊形頂點,并要求能滿足頂點的排序、增加和刪除等操作需要。因此,使用靜態數組存儲原始多邊形(未進行任何處理的多邊形)序列,而操作時使用靜態鏈表存儲。數組/鏈表以頂點為單位存儲多邊形的所有頂點信息,并規定如下:
(1)每一個存儲單元對應多邊形的一個頂點。
(2)每兩個相鄰元素的一個組合對應于多邊形的一條邊。
(3)有一個共同元素的一對組合對應于多邊形的兩條相鄰邊,其中公共元素即為兩條相鄰邊的相交頂點。
因此,多邊形單個頂點的數據結構和多邊形頂點數組定義如下:
typedef struct VERTEX2DI_TYP
{
int X,Y; // the vertex
} VERTEX2D, *VERTEX2D_PTR;
因此,如圖2所示的多邊形P0P1P2… P7表示為:
VERTEX2DI_PTR v2d=new VERTEX2DI[n]; //n=8
VERTEX2D_PTR pv2d=v2d; //指向多邊形序列的指針
VERTEX2D_PTR pt; //多邊形的特征值列表
int *c, *s; // 多邊形的垂直鏈碼表和水平鏈碼表
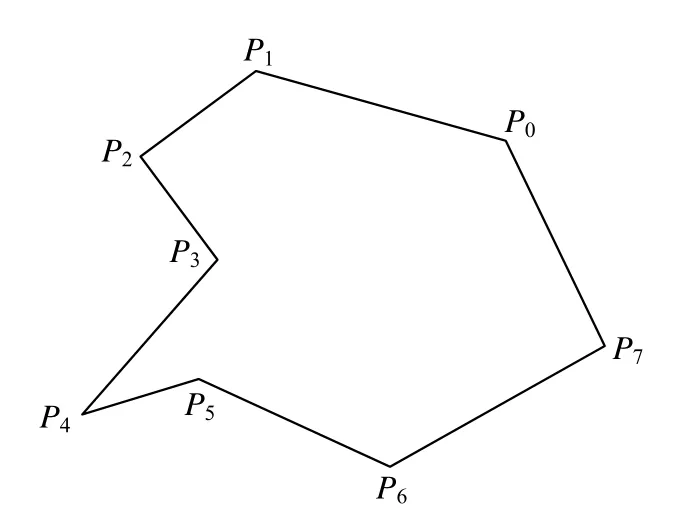
圖2 任意多邊形
另外,定義多邊形頂點的齊次坐標結構和多邊形表示如下:
typedef struct VERTEX3D_TYP
{
int X,Y; // 頂點坐標
int Z; // 方向向量
} VERTEX3D, *VERTEX3D_PTR;
VERTEX3D v3d[8]= {P0, P1, P2, P3, P4, P5, P6, P7};
VERTEX3D_PTR *pv3d=v3d;//指向多邊形序列的指針
VERTEX3D most[len]; // 存儲多邊形沿x方向和y方向的最大值和最小值,其中len=4
此時,多邊形頂點Pi(i∈[0,∞))的齊次坐標表示為(Xi,Yi,Zi),其中Zi表示方向向量,且值恒等于1,即Pi=(Xi,Yi,1)
2 算法描述
算法的基本思想是:首先,以待測點作為原點建立直角坐標系,生成多邊形的水平鏈碼表和垂直鏈碼表;然后,刪除與判斷點和多邊形無關的冗余邊/冗余點,獲得多邊形的特征形。接著,判斷待測點與特征形的內外關系;最后,確定待測點與平面多邊形的內外關系。算法步驟的具體描述如下:
Step 1對多邊形頂點序列進行逆時針排序。排序方法是:將多邊形的n個頂點分別用Pi(i∈[0,n))表示,通過比較線段OPi(過坐標原點和多邊形頂點Pi(i∈[0,n))的線段)與x正半軸組成的夾角的大小,確定多邊形各個頂點逆時針排序時的先后關系,如圖3所示。具體操作包括以下4個方向:

圖3 多邊形的逆時針排序
1)根據頂點個數n創建臨時數組jiaodu[n],用于存儲OPi與x正半軸組成的夾角的大小;
2)計算OPi與Ox的正弦值,若Pi.y> 0,

表1 temp在不同象限對應的角度值
4)對數組jiaodu[n]及與之對應的多邊形頂點序列v2d進行逆時針排序
Step 2以待測點P為原點建立新的直角坐標系,具體操作包括以下2個方面:
1)根據待測點P,計算新坐標系的平移量dx=p.x,dy=p.y,因此平移矩陣
2)計算多邊形的頂點Pi(i∈[0,n))在新坐標系x′oy′中的坐標值Pi′,即Pi′=Pi*MT,效果如圖3所示。
Step 3根據Pi′ (i∈[0,n))的位置標記多邊形頂點的水平鏈碼值(HorizValue)和垂直鏈碼值(VertiValue)。標記規則為:在垂直方向上編碼時,對 點Pi′(i∈[0,n)),若 縱 坐 標yi′>0,則VertiValue=1,否則,VertiValue=0;在水平方向上編碼時,對點Pi′(i∈[0,n)),若橫坐標xi′>0,則HorizeValue=1,否則,HorizeValue=0[6];最后,將計算結果分別存儲在數組c和s中,且數組長度均為n。由此,圖4中多邊形的垂直編碼表和水平編碼表分別為11100000和10000001,且n=8。
Step 4刪除多邊形中與待測點無關的冗余邊或冗余點,獲得多邊形的特征形。具體操作包括以下3個方面:
1)對垂直鏈碼表進行連續的0(1)檢測,方法是:檢測垂直鏈碼表c中是否存在連續的3個或3個以上的0或1,若有,則用第一個及最末一個0或1來代替這段連續的0(1)序列,并獲得簡化后的垂直鏈碼表c_new;
2)據c_new計算相應的水平鏈碼表s_new和多邊形頂點數組v2d_new,頂點數n遞減;
3)對水平鏈碼表s_new重復執行步驟1)和2)的操作。
簡化后的多邊形的垂直鏈碼表和水平鏈碼表為:1100和1001,對應特征形的頂點序列為P0(10,4),P2(-28,2),P3(-20,-10),P7(20,-20),且n=4,如圖4所示。

圖4 多邊形的垂直鏈碼、水平鏈碼和特征形
Step 5判斷點與多邊形的內外關系
1)當n=2時,多邊形簡化為線段,則只需線段是否過原點,若過原點,則待測點在多邊形內;否則,點在多邊形外。
2)當n≥3時,遍歷特征形頂點序列查找沿x,y方向的最大值和最小值并存入數組most中,數組most的長度len∈[3,4],如果most中存在相同的頂點坐標(多邊形發生了退化現象[4]),則刪除相同頂點,len值遞減,并對most進行逆時針排序。
3)當len>2時,取most序列中的前3個點分別賦給q0,q1,q2,定義矢量z={0,0,1},如果(q0q1×q1q2)·z>0,則多邊形特征形的方向為正,否則為負。
4)當len=2時,設剩余兩點分別為Pi,Pj,如果(Pi-1Pi×PiPi+1)·z>0,則多邊形特征形的方向為正,否則為負。
5)據特征形的方向性判斷點與多邊形的內外關系,即連接待測點P與多邊形的任意兩個相鄰頂點,獲得三角形△PPiPi+1,執行Step 3,計算三角形的方向,如果三角形的方向與特征形方向相同,則待測點P位于多邊形內,否則位于多邊形外。如圖5所示,△PP3P7與多邊形特征形P0P2P3P7方向相同,因此待測點P位于多邊形內。

圖5 特征形的方向性及△PPiPi+1的方向性
3 復雜性分析
設多邊形頂點數為n,多邊形的特征形的邊數為m,待測點為P。首先,計算多邊形的水平鏈碼表和垂直鏈碼表的時間復雜度均為O(2*n);然后,分別對多邊形Verti和Horize進行去0和去1運算,求得時間復雜度為O(4*n);接著,計算待測點與特征形內外關系的時間復雜度,當m=2時為O(1),m≥3時為所以時間復雜度的范圍為最后,計算待測點與平面多邊形的內外關系的時間復雜度為O(1);因此,整個算法的時間復雜度范圍為由此可知,算法的整體時間復雜度是線性的。
4 實驗結果及分析
在所設計的2D線框引擎中,當多邊形與屏幕邊緣相交時,首先對多邊形進行屏幕裁剪,獲得頂點的渲染序列;然后判定屏幕頂點與多邊形的內外關系,屏幕頂點位于多邊形內,則作為新的渲染頂點被加入到渲染序列中,否則保持裁剪后的渲染序列不變;最后,對渲染序列進行排序,并根據頂點渲染序列將多邊形渲染到屏幕上。
相應的測試內容包括:
1)當多邊形完全位于屏幕內時的變化;
2)多邊形部分位于屏幕內時的變化;
3)多邊形發生動態變化(移動、旋轉)時,屏幕頂點與多邊形的關系。計算機硬件環境為:Duo T6400 2GHz*2,內存為2GHz,軟件環境為:Visual Studio 2005和DirectX,測試效果如圖6所示。

圖6 多邊形與屏幕頂點關系判定的測試
另外,以多邊形邊數分別為4,6,8,12,16,32隨機生成的任意多邊形為基礎,判斷1000,000個隨機點與多邊形的內外關系,測試算法效率。由于程序運行時間可能會受到外界的干擾,因此對每個多邊形都進行了多次測試并取平均值作為最終結果,其中時間的單位由CPU滴答轉換為秒,并與文獻[8]比較,測試結果如表2所示。
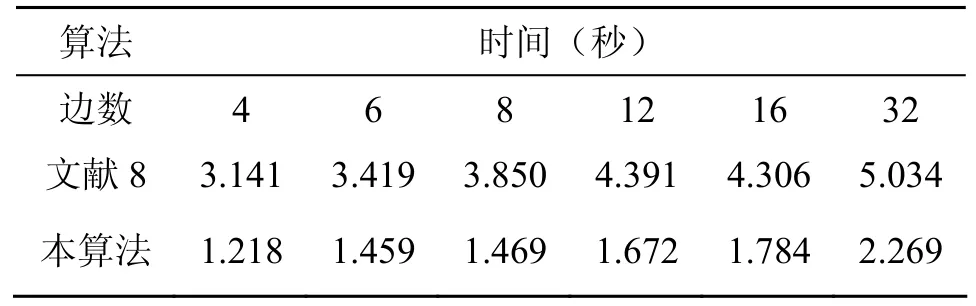
表2 兩種算法的耗時比較
從運行效果可以發現,隨著處理的多邊形邊數的增加,本算法在判斷速度上的優勢更加明顯,證明其具有較好的實際應用價值,并且也非常簡單易行。
[1]Cohen D, Chrysanthou Y, Silva C, et al. A survey of visibility for walkthrough applications [J]. IEEE Transactions on Visualization and Computer Graphics,2003, 9(3): 412-431.
[2]普建濤, 查紅彬. 大規模復雜場景的可見性問題研究[J]. 計算機研究與發展, 2005, 42(2): 236-246.
[3]楊玉婷, 康厚良. 大規模室內場景中的入口技術[J].重慶理工大學學報(自然科學版), 2011, 25(11):78-85.
[4][美]Andre LaMothe著. “3D游戲編程大師技巧”[M].李祥瑞, 陳武譯, 北京: 人民郵電出版社, 2005.
[5]林 芳, 康寶生. 平面多邊形裁剪算法評述[J]. 西安建筑科技大學學報(自然科學版), 2003, 35(3):95-98.
[6]Taloy G. Point in polygon test [J]. Survey Review,1994, 32(254): 479-484.
[7]孫家廣. 計算機圖形學(第3版)[M]. 北京: 清華大學出版社, 2000: 414-418.
[8]李維詩, 李江雄, 柯映林. 平面多邊形方向及內外點判斷的新方法[J]. 計算機輔助設計與圖形學學報,2000, 12(6): 405-407.
[9]彭 歡, 陸國棟, 譚建榮. 基于端點與交點編碼的矩形窗口多邊形裁剪新算法[J]. 工程圖學學報,2006, 27(4): 72-76.
[10]周 欣, 張樹有, 潘志庚. 基于鏈碼和特征形的多邊形內外點判斷算法[J]. 計算機輔助設計與圖形學學報, 2006, 18(9): 1317-1321.
[11]李基拓, 陸國棟, 馮 星. 基于單調性與相關邊的多邊形內外點判斷算法[J]. 中國圖象圖形學報(A),2002,7(6): 596-600.
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
世界科學技術-中醫藥現代化(2020年2期)2020-07-25 02:05:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54