PWM 驅(qū)動(dòng)系統(tǒng)中的對(duì)稱功率濾波器設(shè)計(jì)
2013-04-20 00:43:50曹培培
制導(dǎo)與引信 2013年4期
關(guān)鍵詞:系統(tǒng)
曹培培, 吳 曄
(上海無線電設(shè)備研究所,上海200090)
0 引言
PWM 功率驅(qū)動(dòng)具有調(diào)速范圍寬、快速性好和效率高的優(yōu)點(diǎn),在數(shù)字化伺服控制系統(tǒng)中得到了廣泛應(yīng)用。但是其開關(guān)噪聲的頻帶寬、幅度大、輻射強(qiáng),會(huì)對(duì)控制回路造成嚴(yán)重的干擾,破壞系統(tǒng)穩(wěn)定性[1]。所以,消除開關(guān)噪聲尤為重要。
PWM 功率驅(qū)動(dòng)系統(tǒng)中的開關(guān)噪聲問題得到了國(guó)內(nèi)外學(xué)者的重視,美國(guó)Glenn研究院的學(xué)者提出了一種多級(jí)濾波器的設(shè)計(jì)方案[2],APEX 公司也基于SA03 型功率放大器設(shè)計(jì)出了一種Power Design軟件[3],以上兩種方案都是采用分割電感法的多級(jí)LCR 濾波器,雖然可以獲得一定的抑制效果,但是其結(jié)構(gòu)復(fù)雜,功耗偏大,同時(shí)也增加了設(shè)計(jì)難度。
本文以某高精度直接驅(qū)動(dòng)式伺服跟蹤平臺(tái)為研究對(duì)象,針對(duì)PWM 功率驅(qū)動(dòng)引起的噪聲干擾問題,提出了一種新型的對(duì)稱功率濾波器。根據(jù)濾波器的拓?fù)浣Y(jié)構(gòu),建立其數(shù)學(xué)模型,并對(duì)其傳遞特性進(jìn)行仿真分析。最后,通過實(shí)驗(yàn)驗(yàn)證了濾波器對(duì)噪聲的抑制效果。
1 PWM 功率驅(qū)動(dòng)系統(tǒng)中的噪聲分析
直接驅(qū)動(dòng)式伺服系統(tǒng)硬件結(jié)構(gòu)如圖1所示,包括了DSP電路、CAN 通信電路、PWM 功率驅(qū)動(dòng)電路和A/D 采樣電路。
測(cè)試結(jié)果表明,未加入濾波網(wǎng)絡(luò)時(shí),控制回路的地線存在與開關(guān)頻率(30kHz)相近的高頻噪聲,影響了A/D 采樣結(jié)果的精度。此外,電路中的基準(zhǔn)電源同樣受到輻射干擾,輸出波形不穩(wěn)定。基于以上問題,控制系統(tǒng)的穩(wěn)定性和精度都無法得到保證。
經(jīng)過分析,產(chǎn)生干擾的主要原因?yàn)椋嚎臻g輻射和傳導(dǎo)耦合。電機(jī)功率驅(qū)動(dòng)電路在每次進(jìn)行PWM 斬波調(diào)制時(shí),會(huì)產(chǎn)生很大的開關(guān)噪聲和電磁干擾,它不僅影響PWM 驅(qū)動(dòng)電路,而且還會(huì)通過電源和地進(jìn)入控制回路中,干擾路徑如圖1所示。
圖1 控制系統(tǒng)硬件電路
抑制干擾的方法有很多種,例如電流平波、屏蔽、濾波和信號(hào)隔離等[1]。其中,電流平波需要在電機(jī)兩端串接較大感值的電感,這種措施雖然可以抑制高次諧波,但會(huì)增加低頻有用信號(hào)的衰減。此外,由于空間的限制,難以實(shí)現(xiàn)完全屏蔽和隔離。基于以上原因,選取濾波作為主要解決方案。
2 對(duì)稱式功率濾波器設(shè)計(jì)
對(duì)稱式功率濾波器不僅要保證足夠的高頻衰減,而且要有足夠高的電流響應(yīng)能力,以滿足高精度動(dòng)態(tài)伺服跟蹤要求[4]。現(xiàn)有的一階LCR 濾波器不能兼顧帶寬和高頻衰減要求,所以必須提高濾波階次。
2.1 對(duì)稱式濾波器的拓?fù)浣Y(jié)構(gòu)
PWM 功率驅(qū)動(dòng)系統(tǒng)中,功率放大器輸出到電機(jī)兩端的是一對(duì)互補(bǔ)對(duì)稱的方波,所以濾波網(wǎng)絡(luò)的拓?fù)浣Y(jié)構(gòu)也必須對(duì)稱。綜合上述一階LCR濾波器和多級(jí)分割電感式濾波器的優(yōu)點(diǎn),提出了一種新型的濾波器拓?fù)浣Y(jié)構(gòu),如圖2所示。
圖2 對(duì)稱式PWM 濾波網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)
2.2 對(duì)稱式功率濾波器頻率特性分析
利用阻抗分析原理,將濾波網(wǎng)絡(luò)分割成兩個(gè)相同結(jié)構(gòu)的電路,如圖3所示。
圖3 濾波網(wǎng)絡(luò)分割圖
令
得
由 圖3 可 見,R = (1/C1s + L3s +R1)//(1/C4s)//(Lms+Rm)。當(dāng)U+=0時(shí),R 兩端的電壓為UO1、UO2,當(dāng)U+=0時(shí),R 兩端的電壓則為UO3、UO4。
由于該濾波網(wǎng)絡(luò)為對(duì)稱結(jié)構(gòu),所以
再由式(1)、(2)和(3)得到濾波網(wǎng)絡(luò)的傳遞函數(shù)為

研究對(duì)象中伺服電機(jī)的內(nèi)阻Rm=5Ω,電感Lm=5mH,供電電壓VM=24V,PWM 載波頻率f=30kHz。設(shè)計(jì)要求紋波峰值應(yīng)小于100mV,即頻率在30kHz處的衰減應(yīng)大于-48.9dB。根據(jù)濾波網(wǎng)絡(luò)的傳遞特性,設(shè)計(jì)得到一組濾波參數(shù)為L(zhǎng)1=L2=200μH,C1=15μF,C2=C3=1μF,C4=6.8μF,R1=10Ω。將數(shù)值代入式(4),得到濾波器傳遞函數(shù)為
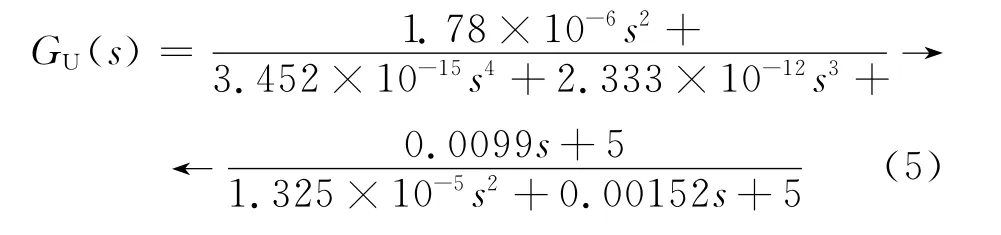
濾波器傳遞特性如圖4所示,圖中A 點(diǎn)坐標(biāo)為(1.69kHz,-3dB),B 點(diǎn)坐標(biāo)為(30kHz,-50.3dB),即濾波器的帶寬為1.69kHz,在30 kHz處的衰減為-50.3dB,保證了足夠的帶寬和高頻衰減量。圖4中的傳遞特性曲線上存在諧振峰,它并不影響系統(tǒng)的穩(wěn)定性,反而可以保證足夠的閉環(huán)帶寬。
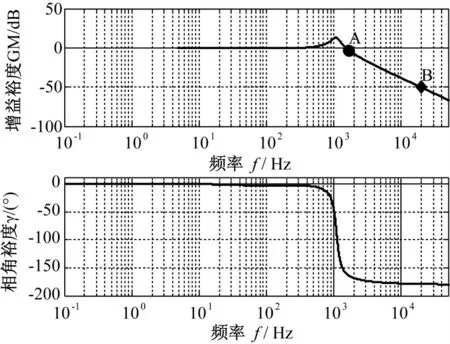
圖4 PWM 對(duì)稱功率濾波器波特圖
從濾波網(wǎng)絡(luò)的拓?fù)浣Y(jié)構(gòu)和傳遞特性可以看出,L1、L2和C1值越大,帶寬越小,高頻衰減越大。C4與R1則主要用于調(diào)節(jié)系統(tǒng)的諧振和阻尼,其值越大,諧振越小。C2和C3的主要作用消除共模噪聲,選取不當(dāng)會(huì)引起較大共模分量。
2.3 濾波器對(duì)控制回路的影響
穩(wěn)定跟蹤平臺(tái)控制回路采用雙環(huán)路結(jié)構(gòu),如圖5所示,內(nèi)環(huán)由測(cè)速機(jī)構(gòu)成速度反饋回路,完成對(duì)電機(jī)速度的控制,外環(huán)由電位計(jì)構(gòu)成位置反饋完成對(duì)機(jī)構(gòu)位置的控制[5]。
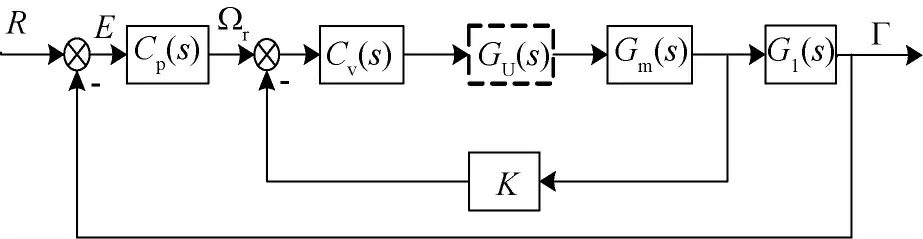
圖5 控制回路模型框圖
圖5中,R 為控制角;E 為角誤差;Ωr為參考角速度;U 為驅(qū)動(dòng)電壓;Ω 為電機(jī)角速度;Γ為天線指向角;Gm(s)為電機(jī)傳遞函數(shù);Gl(s)為機(jī)構(gòu)傳遞函數(shù);K 為測(cè)速機(jī)反饋系數(shù);Cv(s)為速度環(huán)控制律;Cp(s)為位置環(huán)控制律。
圖6為濾波網(wǎng)路加入控制回路前后的波特圖對(duì)比,從系統(tǒng)開環(huán)波特圖中可以看出,未加入濾波網(wǎng)絡(luò)之前系統(tǒng)的帶寬為47.5 Hz,相角裕度為59.7°,加入濾波網(wǎng)絡(luò)之后系統(tǒng)的帶寬保持不變,諧振峰以及較大的相位滯后都出現(xiàn)在帶寬以外,這說明濾波網(wǎng)絡(luò)并不會(huì)改變系統(tǒng)傳遞特性。

圖6 濾波前后控制回路的頻域仿真
3 仿真和實(shí)驗(yàn)結(jié)果分析
3.1 Multisim 環(huán)境下時(shí)域仿真和實(shí)驗(yàn)結(jié)果對(duì)比
按照上述濾波器選定的器件參數(shù),在Multisim 環(huán)境下建模,并進(jìn)行時(shí)域仿真。由圖7 可以看出,濾波器輸出的峰峰值為±85mV,實(shí)測(cè)濾波器輸出結(jié)果的峰峰值為±88.5mV。實(shí)測(cè)結(jié)果相比仿真結(jié)果存在±3.5 mV 的偏差。經(jīng)過分析,產(chǎn)生偏差的主要原因?yàn)椋簽V波器元器件參數(shù)不一致,PCB布線也不完全對(duì)稱。此外,在方波信號(hào)的上升沿和下降沿會(huì)產(chǎn)生30kHz毛刺,但是從實(shí)際濾波結(jié)果可以看出,該毛刺被抑制在±100mV以內(nèi),不會(huì)造成很強(qiáng)的輻射干擾。
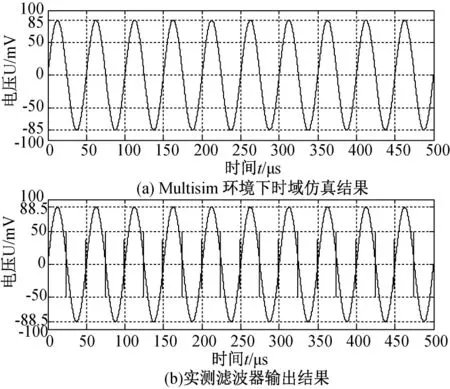
圖7 濾波器輸出的時(shí)域仿真結(jié)果和實(shí)測(cè)結(jié)果
3.2 濾波前后傳感器信號(hào)采樣對(duì)比
在控制回路未加入濾波網(wǎng)絡(luò)時(shí),陀螺電壓和電位計(jì)電壓采樣結(jié)果毛刺很大。從圖8可以看出,將濾波網(wǎng)絡(luò)加入控制回路后,濾波器可以將陀螺電壓和電位計(jì)電壓的毛刺壓制在±100mV 范圍內(nèi),噪聲輻射強(qiáng)度很弱,不會(huì)影響控制回路性能。
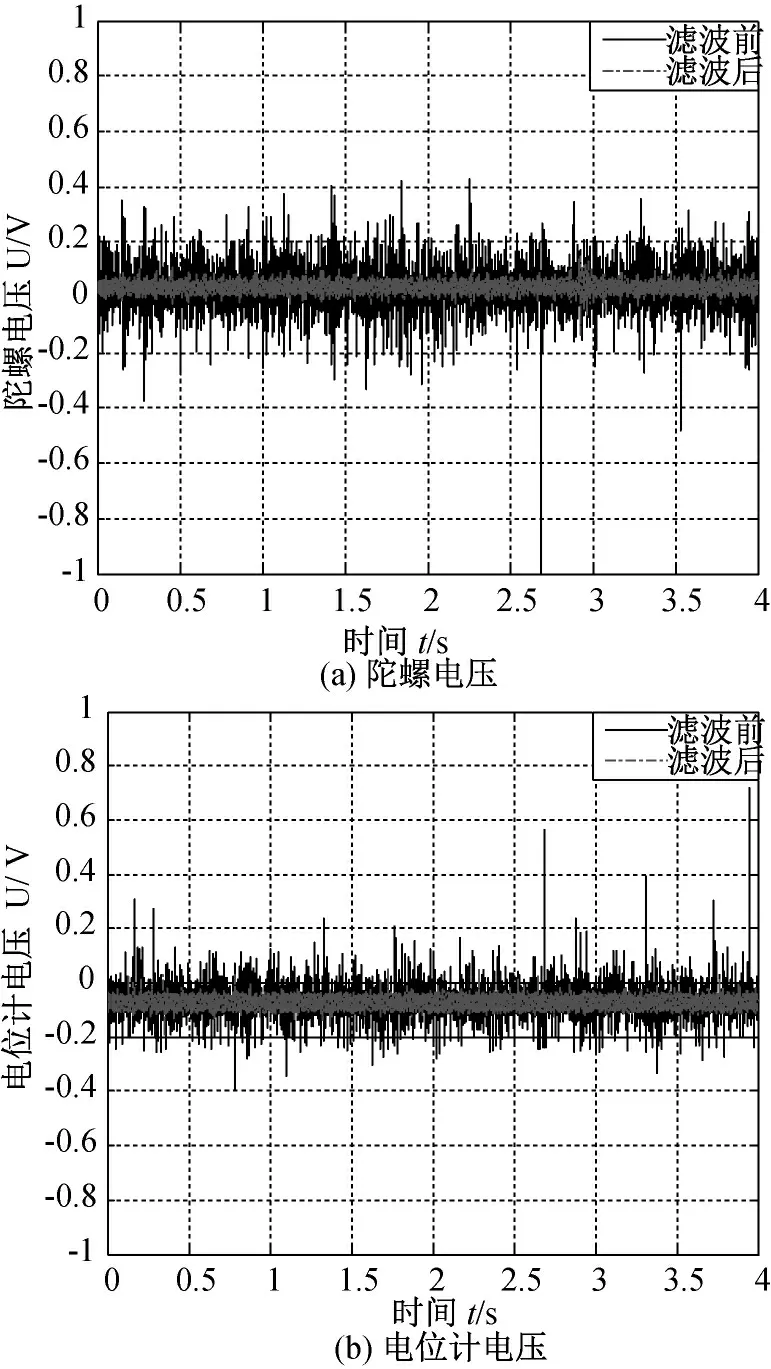
圖8 濾波前后模擬信號(hào)電壓采樣結(jié)果
4 結(jié)論
本文分析了PWM 驅(qū)動(dòng)系統(tǒng)中存在的開關(guān)噪聲問題,比較了分割電感式和一階LCR 功率濾波器的優(yōu)缺點(diǎn),提出了一種新型的對(duì)稱式濾波器,并對(duì)濾波網(wǎng)絡(luò)的傳遞特性進(jìn)行了頻域和時(shí)域仿真分析。實(shí)驗(yàn)結(jié)果表明,該濾波器將模擬信號(hào)的噪聲幅度抑制在±100 mV 以內(nèi),將開關(guān)噪聲的輻射干擾抑制在允許范圍內(nèi)。若濾波器中的元器件能夠經(jīng)過嚴(yán)格篩選,功放輸出布線能夠嚴(yán)格對(duì)稱,濾波效果將會(huì)得到進(jìn)一步改善。
[1] 黨永華.某PWM 驅(qū)動(dòng)系統(tǒng)中干擾問題的分析[J].火控雷達(dá)技術(shù),2005,34:82-84.
[2] Barbara H.Kenny,Walter Santiago.Filtering and Control of High Speed Motor Current in a Flywheel Energy Storage System [C].International Energy Conversion Engineering Conference,2004.
[3] Barbara H.Kenny,Walter Santiago.Filtering and Control of High Speed Motor Current in a Flywheel Energy Storage System [C].International Energy Conversion Engineering Conference,2004.
[4] 李海霞,韓豐田.高精度慣導(dǎo)平臺(tái)低噪聲PWM 功率驅(qū)動(dòng)裝置設(shè)計(jì)[J].清華大學(xué)學(xué)報(bào),2009,49(5):668-672.
[5] Apex Microtechnology Corp.Low Pass Filtering[Z].2001.
[6] 張艷,劉楊,陳峻山.導(dǎo)引頭伺服系統(tǒng)控制回路Anti-Windup設(shè)計(jì)[J].制導(dǎo)與引信,2011.32(3):5-8.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32