一種實驗室合成孔徑雷達對目標散射的成像試驗
2013-04-23 01:54:36葛亦斌金亞秋王海鵬
電波科學學報 2013年3期
葛亦斌 金亞秋 王海鵬
(復旦大學波散射與遙感信息重點實驗室,上海200433)
引 言
雷達系統發射線性調頻連續波(Frequency Modulated Continuous Wave,FMCW),通過雷達平臺的移動使雷達天線按照一定的虛擬單元構成天線單元,合成等效大孔徑天線,提高了方位向分辨率[1-3].該合成孔徑雷達(Synthetic Aperture Radar,SAR)對目標高分辨率檢測成像是當今遙感與目標識別的主要技術.相比脈沖波雷達[4],FMCW雷達系統具有重量輕、成本低、功耗低、分辨率高等特點.較低的峰值功率使其隱蔽性高,對抗反輻射武器能力強[5-7].目前,FMCW雷達成像研究大多數是簡單目標的二維成像仿真[8-9],或隱藏目標的位置探測.
本實驗室微波暗室構建了平臺移動的極化雷達成像系統,用于極化SAR對目標模型的實驗室試驗研究.采用分數階Fourier變換(Fractional Fourier Transform,FRFT)和調頻信號算法(Chirp Scaling,CSA )[10],用FRFT提高方位向分辨率,由此提出了基于FRFT的適用于小距離徙動、近距離的目標成像算法.本實驗用一縮小尺寸的金屬坦克模型,以及用樹葉簇遮蔽下的該坦克模型進行了雷達不同入射角觀測下HH、VV、VH、HV極化回波的數據采集與極化成像.同時,采用三面體角反射器進行雷達散射截面(Radar Cross Section,RCS)定標[11],對實驗結果與數值模擬結果進行比較與驗證.
1 全極化SAR實驗室系統
本實驗室極化雷達成像系統設計原理如圖1所示.雷達系統實驗描述見圖2,其中天線視角可變動,上下可移動,雷達沿軌道水平勻速運動.
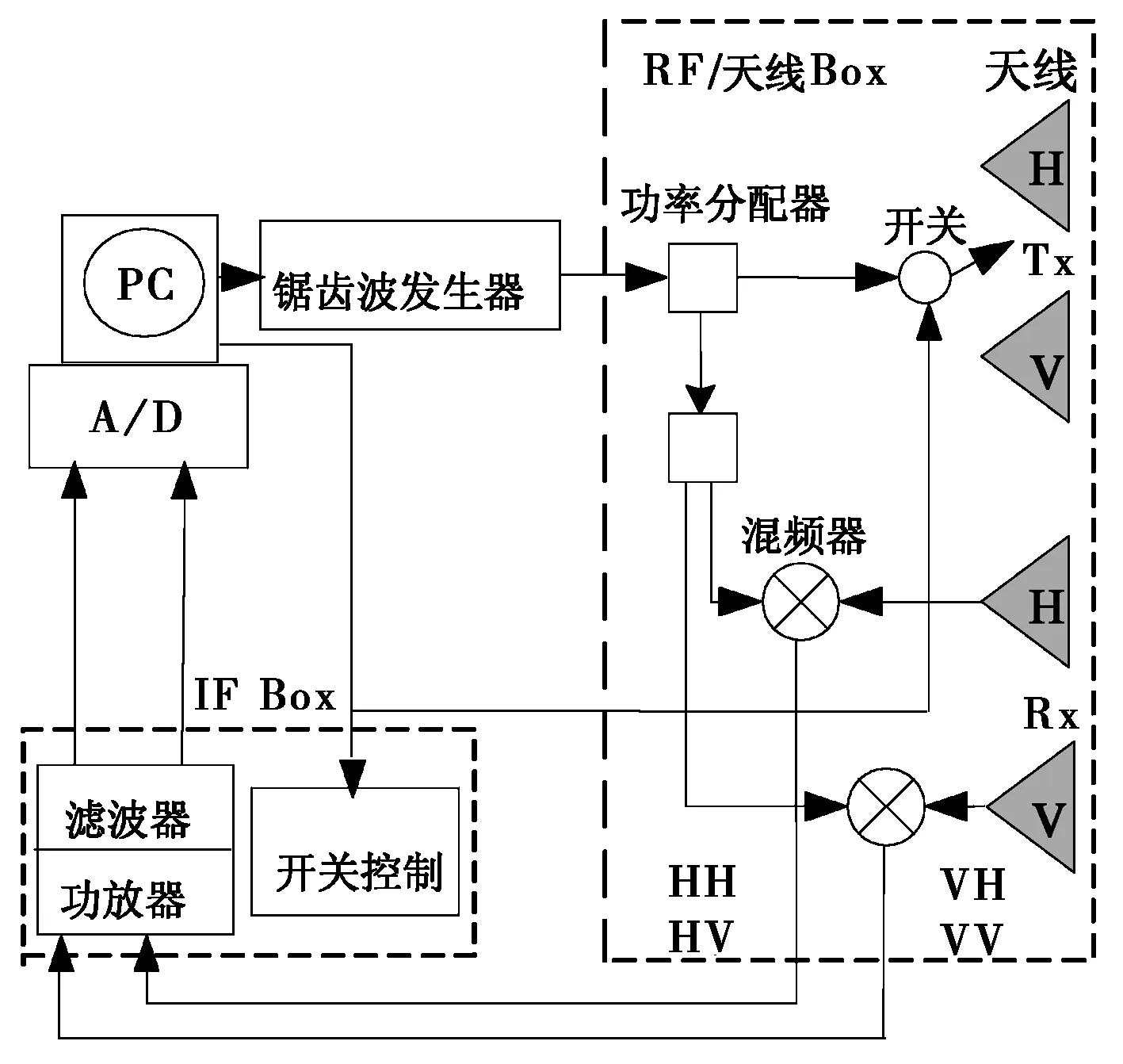
圖1 本實驗室SAR系統原理圖
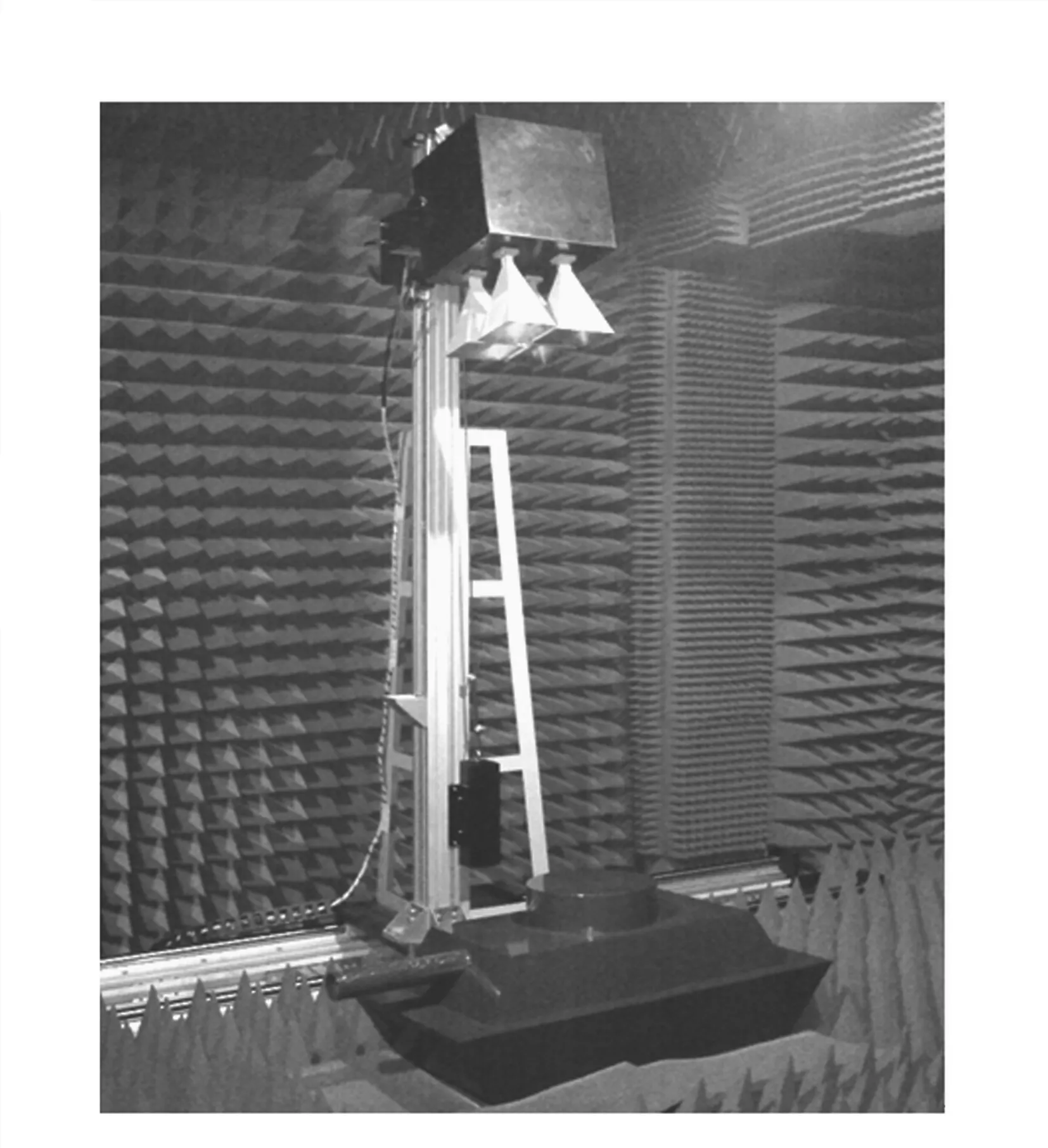
圖2 本實驗室極化SAR對目標模型的實驗
雷達成像系統發射頻率為8~10 GHz調頻連續波,功率分配器產生功率相同的兩路信號,一路由開關控制交替發射水平極化波(H)和垂直極化波(V),另一路作為參考信號和接收信號進行混頻處理.該雷達系統可以分別獲得水平與垂直同極化HH與VV,以及交叉極化VH與HV后向散射數據,構建2×2維復散射矩陣[6].
1.1 FRFT
雷達發射線性調頻信號,通過估算雷達回波方位向數據的調頻斜率,構造匹配濾波器進行方位向壓縮,進行SAR散射成像.FRFT作為一種廣義的Fourier變換,將信號在一組正交調頻信號基上展開,一個調頻信號在某一階次下的FRFT是一個沖擊函數.實驗中接收到的信號在方位向正是一個線性調頻信號,在某一特定階次下,將信號壓縮成沖擊函數,相比脈沖壓縮,主瓣壓縮和旁瓣抑制效果非常明顯[10].
信號s(t)的p階FRFT定義為
(1)
式中:FRFT變換函數為
(2)
p為FRFT的階數,參數α=pπ/2為正實數,取pπ/2=2π得周期為4.將式(2)代入式(1)有
(3)

1.2 成像算法
按圖1 FMCW成像原理,將接收信號和發射信號進行差頻處理,得到點目標函數[5]:
(4)
式中:A是振幅;f0為中心頻率;t為時間;M=B/T為調頻率,B為帶寬,T為持續時間;τ為時間延時;g=g(x0,y0,z0)是位于(x0,y0,z0)目標元的反射系數.
成像算法[10,15]如圖3描述,對接收到的信號在距離向進行快速傅里葉變換(Fast Fourter Transform, FFT)和方位向做特定階次的FRFT,分別實現距離向和方位向的壓縮,得到SAR圖像.FFT是FRFT在階次為1時的特殊情況.目標回波信號通過差頻處理,如圖4所示.差頻的結果使得回波頻率與時間延時相關,因此在距離向進行FFT,可以完成距離向壓縮.雷達平臺勻速運行,信號在方位向為線性調頻信號,而一個調頻信號在某一階次下的FRFT是一沖擊函數,在方位向進行FRFT,可以完成方位向壓縮.
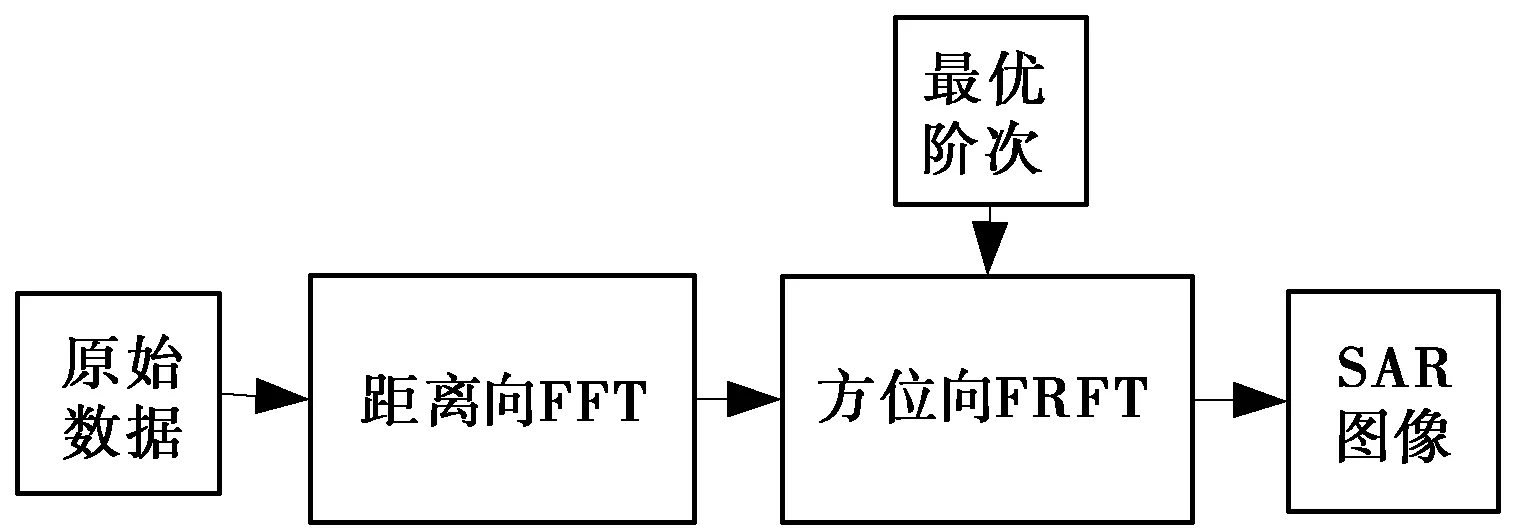
圖3 基于FRFT成像算法
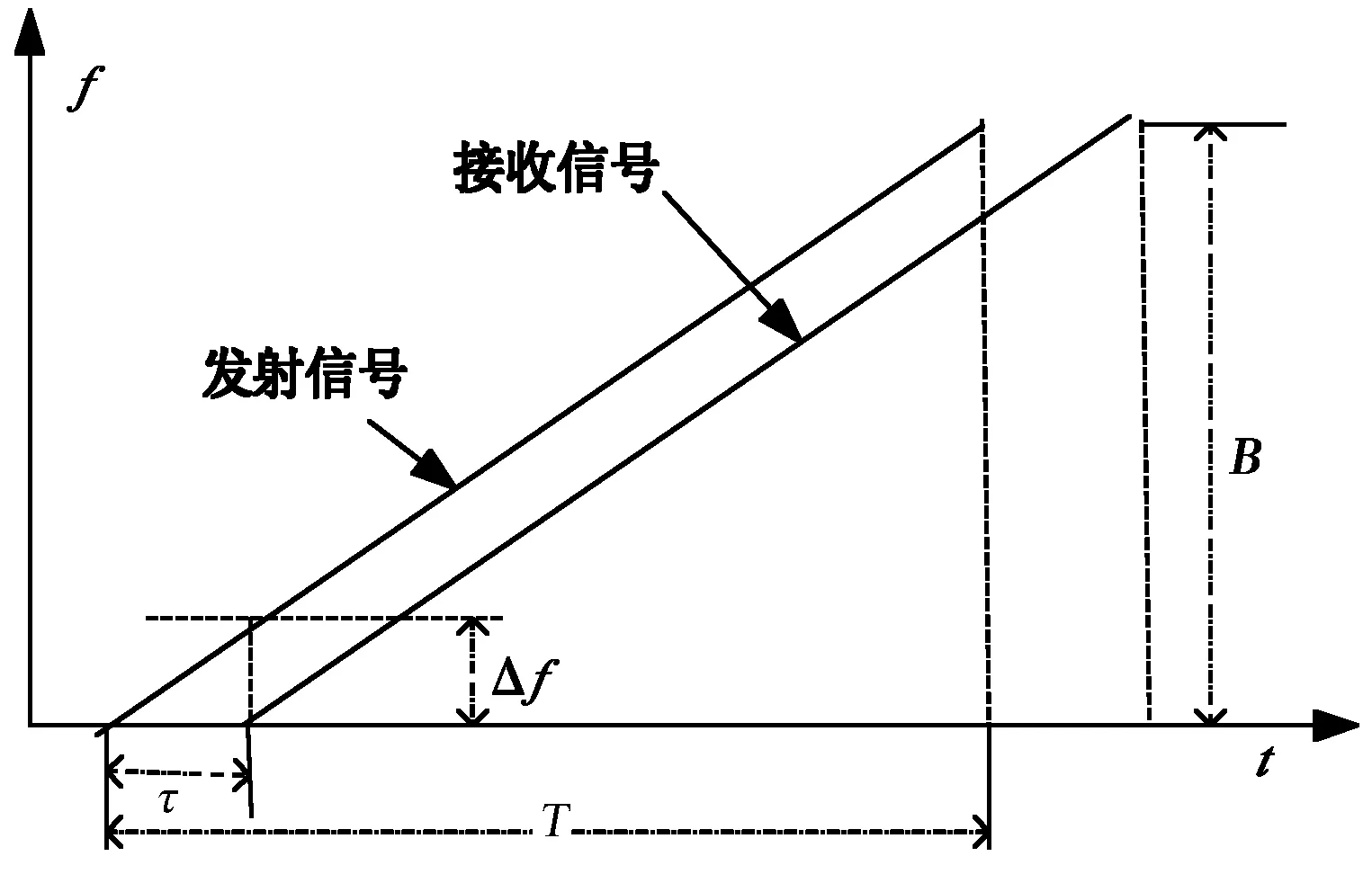
圖4 線性調頻信號頻率變換
在距離向經過對時間t的FFT變換后的表達式為
U(x,y,z)=Af(z-z0)g(x0,y0,z0)
h(x-x0,y-y0,z0).
(5)
式中:
(6)
(7)
c表示光速.當雷達沿一維x方向勻速運動時,則x-x0=νtm,y=y0,tm表示方位向時間,式(7)變為
(8)

對于一個復雜體目標,回波信號在距離向經過對時間t的FFT變換后,式(5)寫為
h(x-x0,y-y0,z0)dx0dy0.
(9)
式中:L表示雷達沿一維x方向運行的長度; 在y方向為無限區域積分.當目標位于z=z0,式(9)變為
h(x-x0,y-y0,z0)dx0dy0.
(10)
對式(10)兩邊進行方位向的FRFT,由于式(8)為s′(t)=exp(jat2+bt)的線性調頻信號,根據FRFT在某一階次下h(x-x0,y-y0,z0)與共扼復數卷積時可以轉換為沖擊函數δ(x-x0,y-y0,z0),得到目標的散射數據[9]
(x0-x,y0-y,z0)dxdy.
(11)
成像分辨率由雷達工作帶寬、合成孔徑大小來決定.距離上分辨率為ΔR=c/(2B),B為頻率偏移量.方位向分辨率為L/2,L表示雷達天線尺寸.由于雷達成像是在二維頻域上得到的,且在壓縮過程中不同維數上壓縮的比例不同,因此需要對時域和頻域的轉換,才能還原目標真實的大小.
由圖4可得,在距離向Δf/τ=B/T,τ=2R/c,因此Δf/R=2B/(cT),頻率差Δf與雷達和目標的距離R成正比.其中τ為信號的時間延遲,Δf為發射信號與接收信號的頻率差,R為天線至目標的距離,帶寬B=2 GHz,運行持續時間T≈10 ms,因此Δf≈(4/3)×103R.
在方位向, FRFT的時移性質為
-j2πut0sinα)Fp[s(t)](u
-t0cosα).
(12)
其中p=2α/π,可以得到時間t和頻率u的對應關系:u=tcosα.
1.3 三面角體反射器RCS定標
三面體角反射器圖5是SAR定標中使用最為廣泛的無源點目標,它結構簡單、有穩定的大散射截面積RCS,且在較寬的角度范圍內RCS變化較小.其誤差大致來自于加工制作、安裝位置與偏向等.準確的三面體角反射器的加工與布設,可以減小誤差.
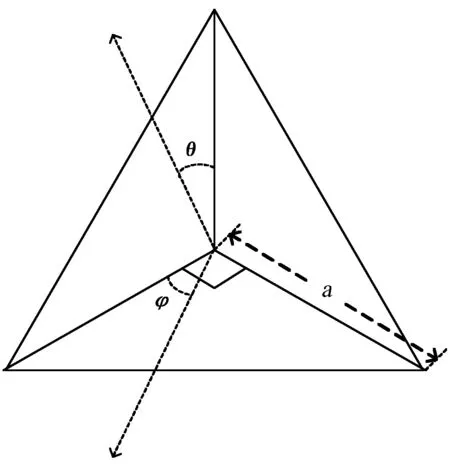
圖5 三面體角反射器模型
RCS定標流程如圖6所示.先在地面定標場中設置已知散射截面積σ的標準角反射器,雷達先對該定標目標成像,比較測得的散射值gi與標準角反射器的理論散射截面積σ,這里下標i是第i次測量.為提高比較精度,測試樣本次數應盡可能多.
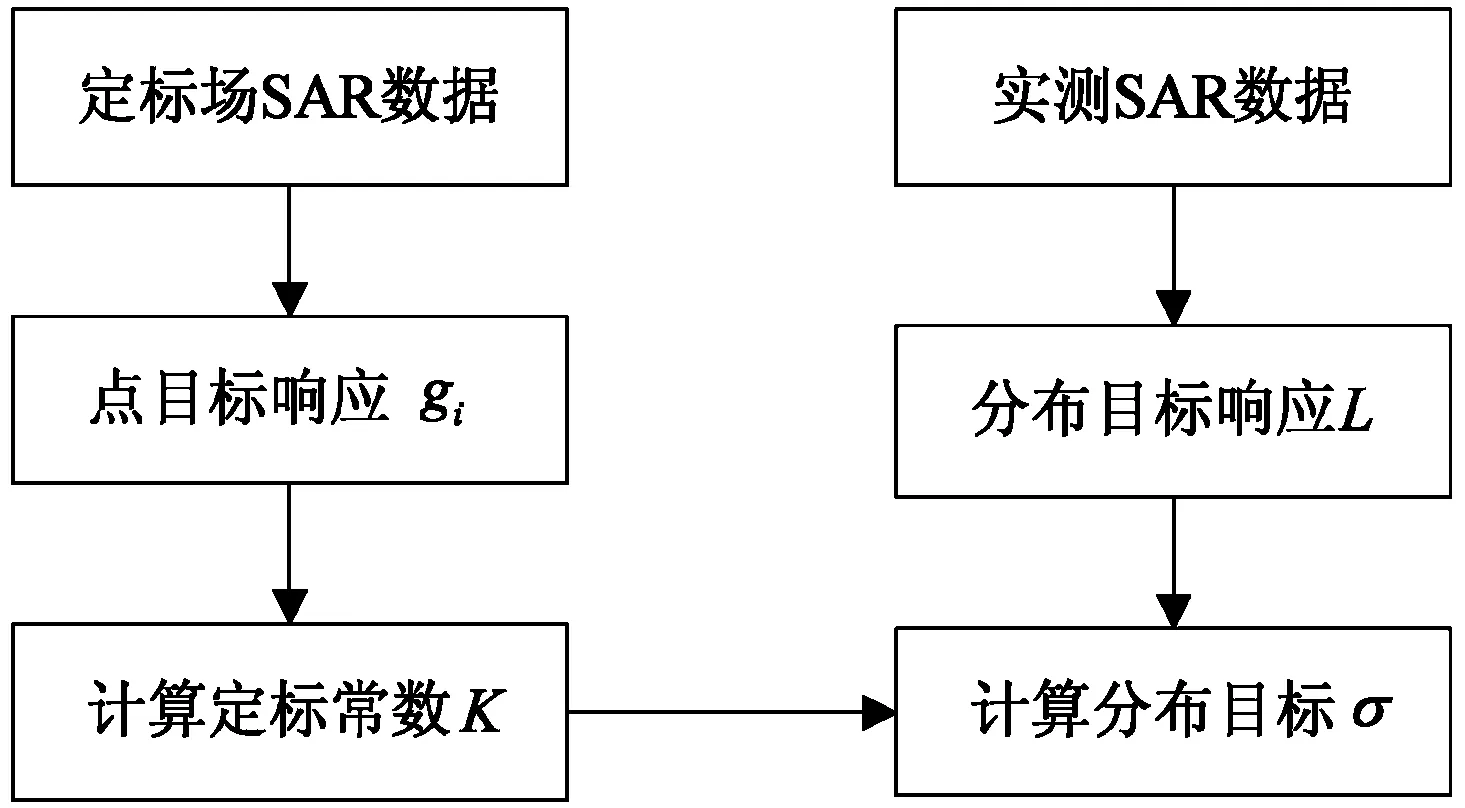
圖6 目標RCS定標流程
為計算定標常數K,共進行n(=5)次測試,設σref為定標器散射截面理論值,則定標常數Ki=gi/σref.為提高定標精度,以5次測試的平均值作為最終定標常數.
實驗設計的三面體角反射器棱長a=0.2 m, 入射波頻率f=9 GHz (波長λ=0.033 m).當固定俯仰角θ=60°,方位角φ在區間[0°,90°]上變化時的RCS曲線如圖7虛線所示.曲線關于φ=45°對稱,RCS在φ=45°處取得較大值.當固定方位角φ=45°,俯仰角θ變化時的RCS 如圖7實線所示,可看出RCS 在θ=56°附近時取得極大值.
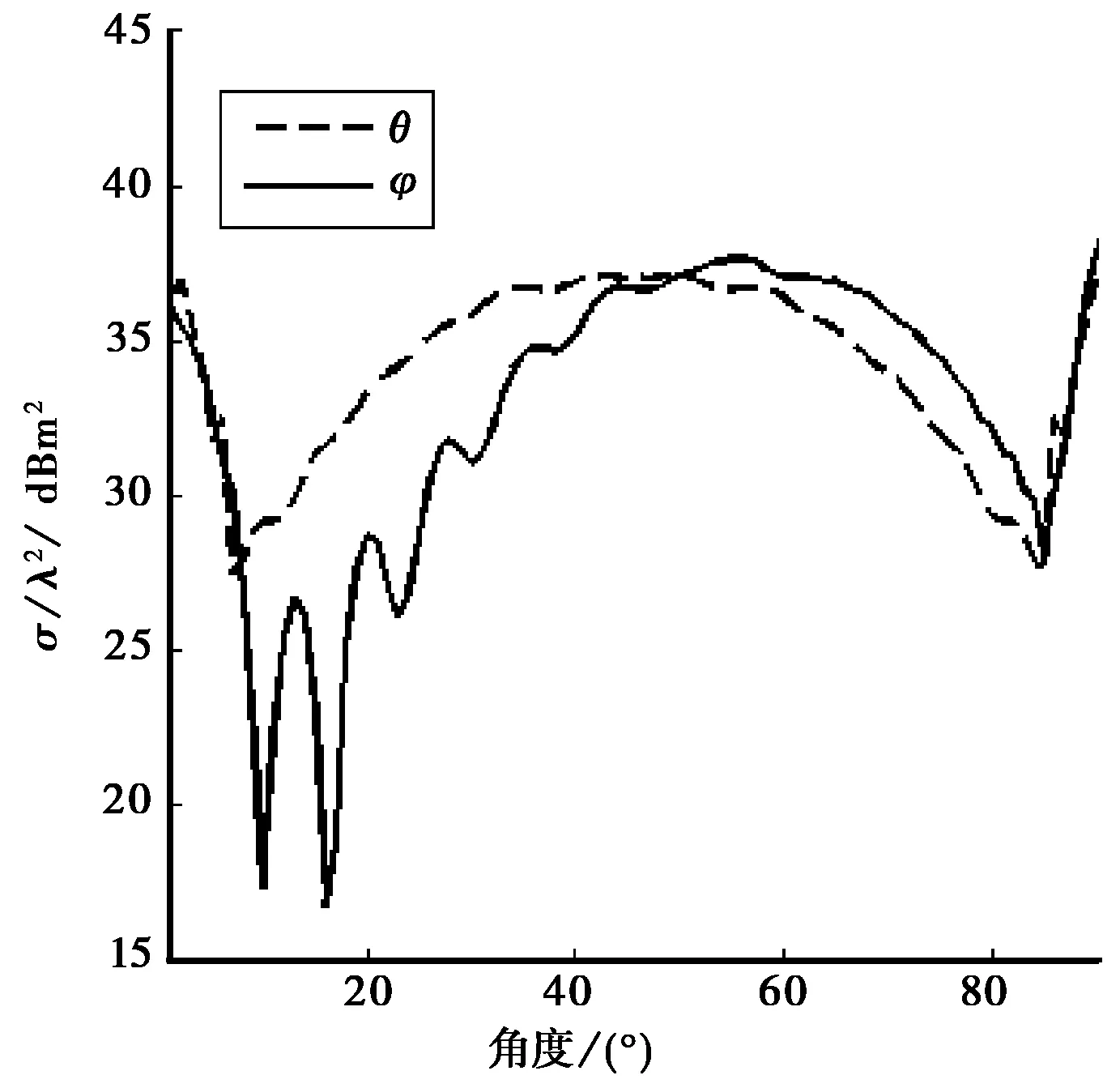
圖7 三面體角反射器RCS
按三面體角反射器RCS[13]最大值公式σmax=4πa4/(3λ2),目標RCS變化的動態范圍很大,常用其相對的1 m2分貝數來表達,即分貝平方米(dB·m2),三面體角反射器RCS表示為10log(σmaxλ2)=37.34 dB·m2.
該值與FEKO算法計算(如圖7)的10log(σmax(FEKO)/λ2)=37.63 dB·m2相差很小,精度為0.7%.根據以上定標,實驗室三面體角反射器定標常數確定為K=gi/σref=42.75,定標結果見圖8.
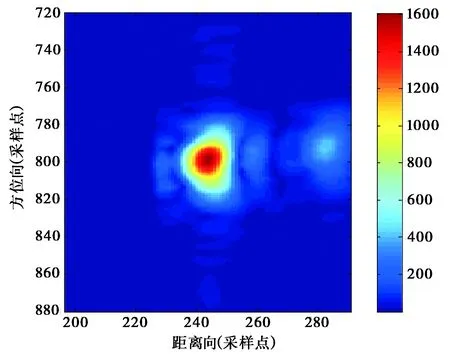
(a) 定標前
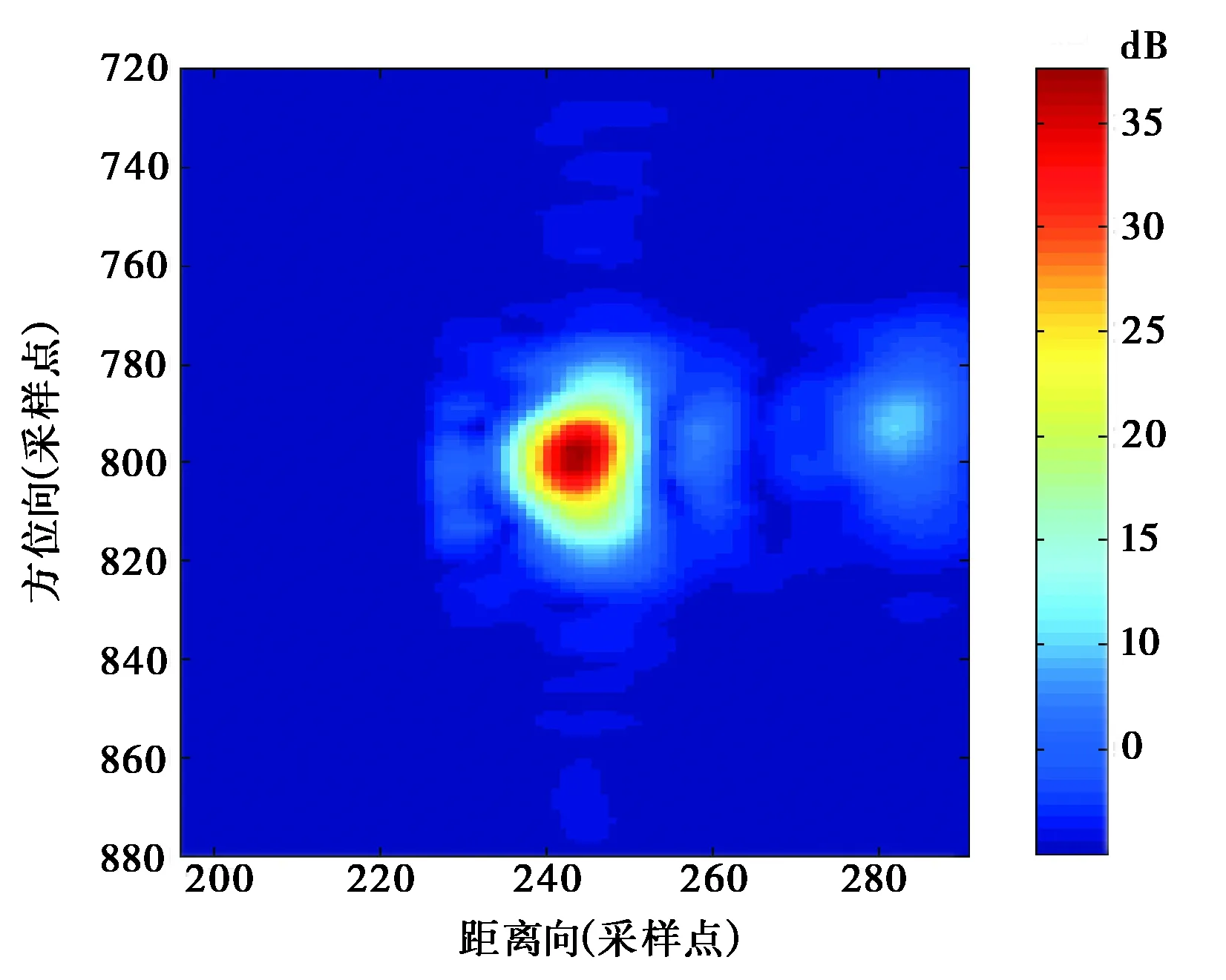
(b) 定標后圖8 三面體角反射器成像
2 目標模型極化散射與成像實驗
移動平臺以場景為中心,以3 cm/s勻速橫向平移1.5 m,天線高度為2 m.坦克模型長約1.1 m,高約0.45 m,寬0.45 m,采用寬帶喇叭天線獲取8~10 GHz的全極化散射矩陣數據[14],采樣頻率間隔為25 MHz.假設沿信號入射的方向為距離向,與取樣架平行方向為方位向,則方位向和距離向分辨率分別為:ΔR=c/(2Δw)=7.5 cm和L/2=6.9 cm.在多個小球的成像中,當小球間距離低于理論分辨率時在圖像中難以分辨,反之則能分辨,因此,確定了實際成像結果的分辨率和系統參數分析成像分辨率是一致的.考慮SAR成像的幾何特征,斜距圖像的比例失真,透視收縮與頂底位移等特性,在不同的雷達視角下,有不一樣的成像特性.視角分別取0°,10°,30°,如圖9所示.由于實驗室雷達視角的調整區間為10°~60°,在選用0°時,是將坦克模型按天線射線方向傾斜對應的角度.
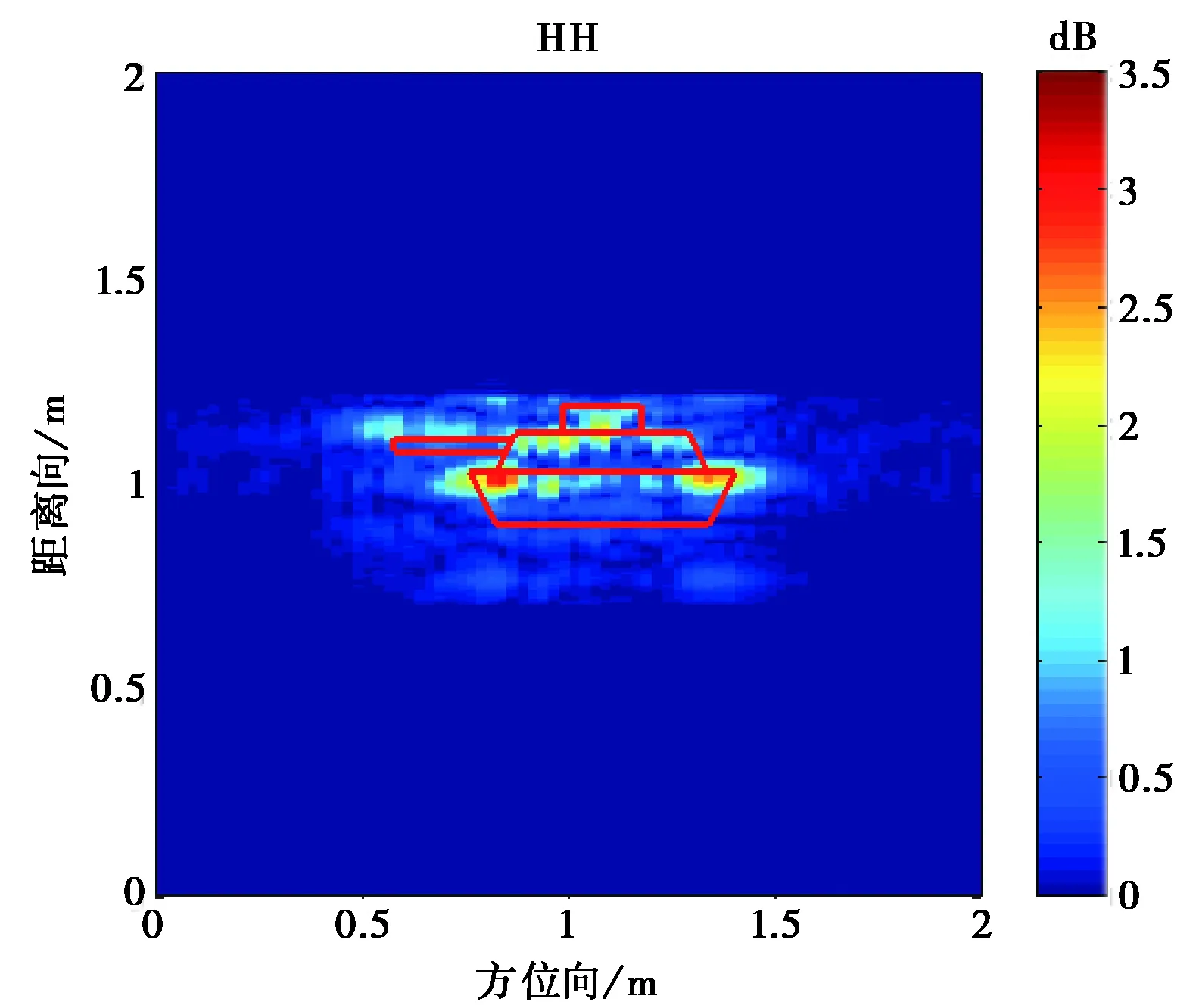
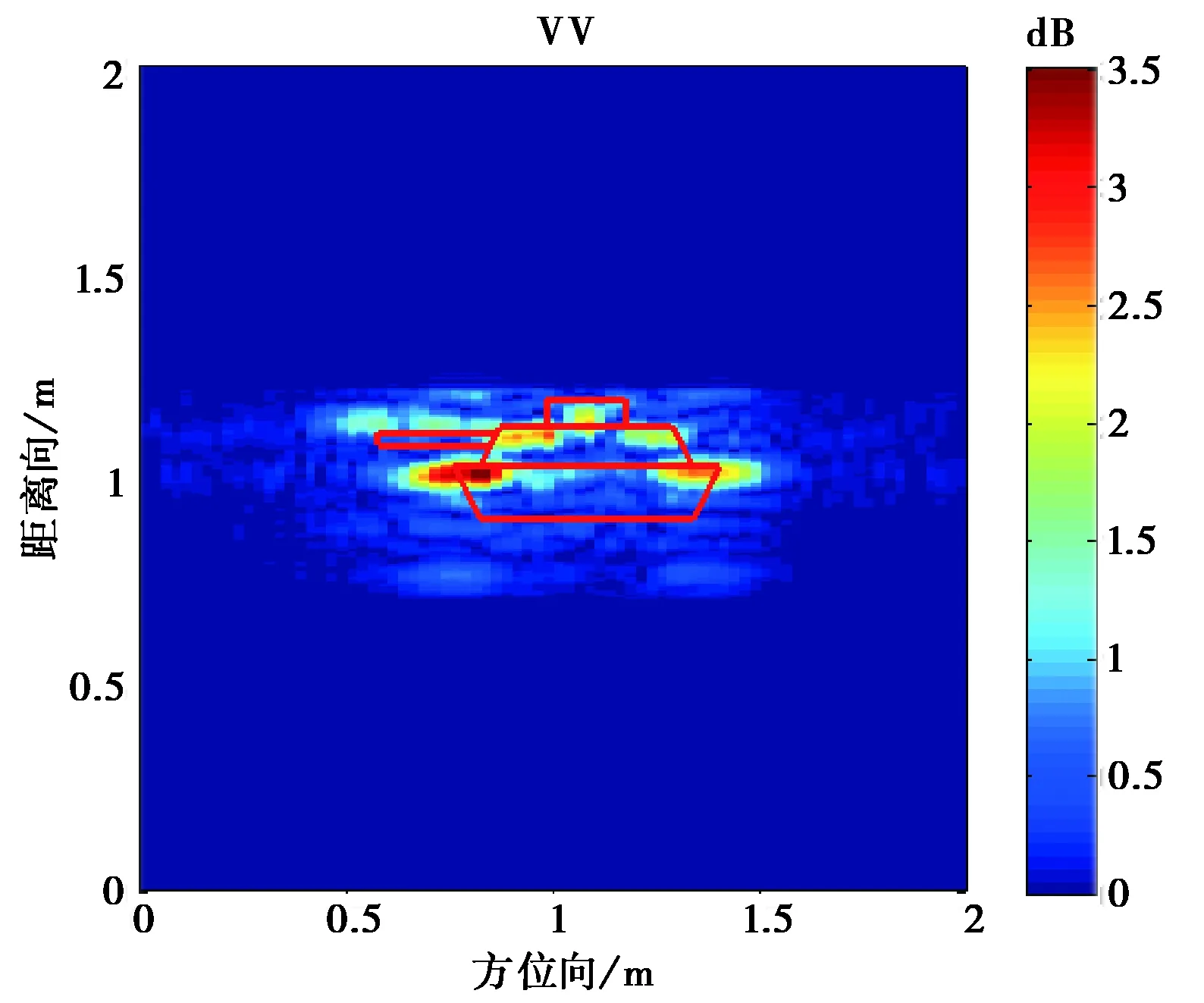
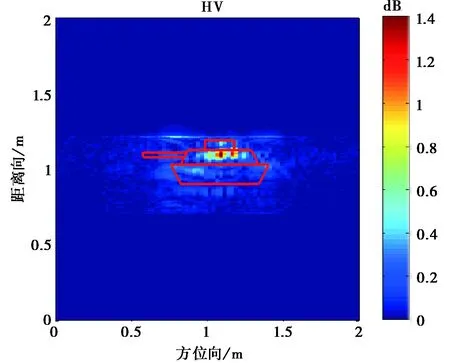
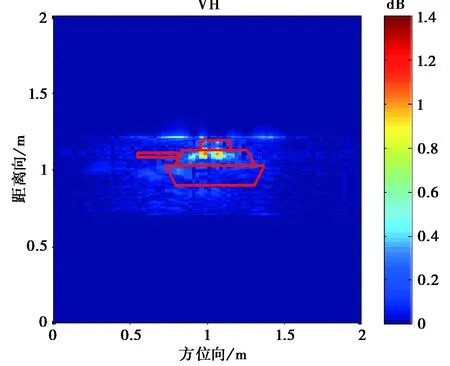
圖10 入射角為0°的坦克模型目標極化成像
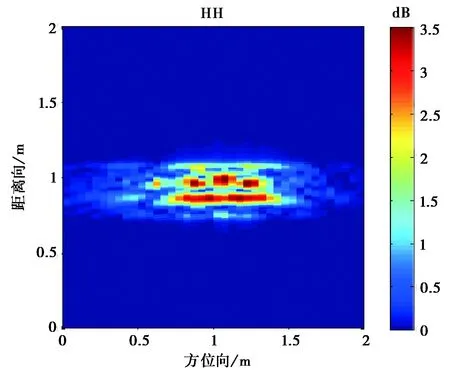
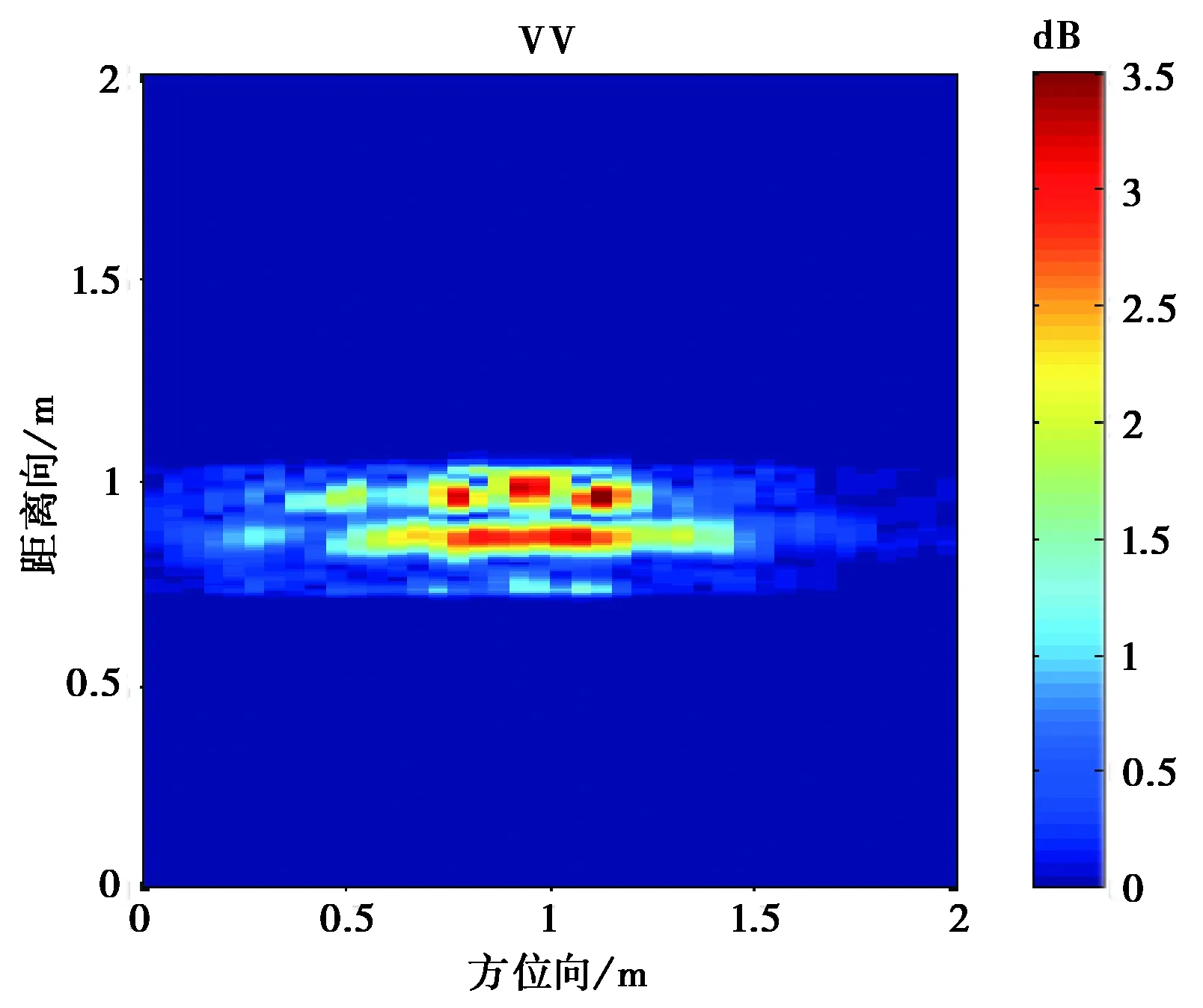
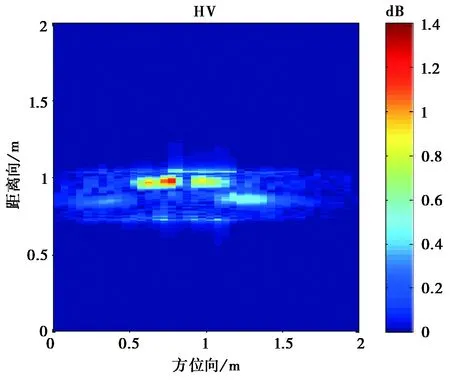
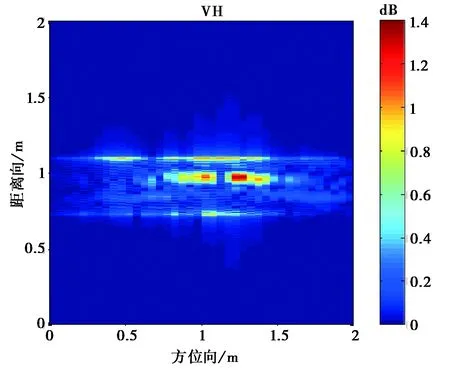
圖11 入射角為10°的坦克模型目標極化成像
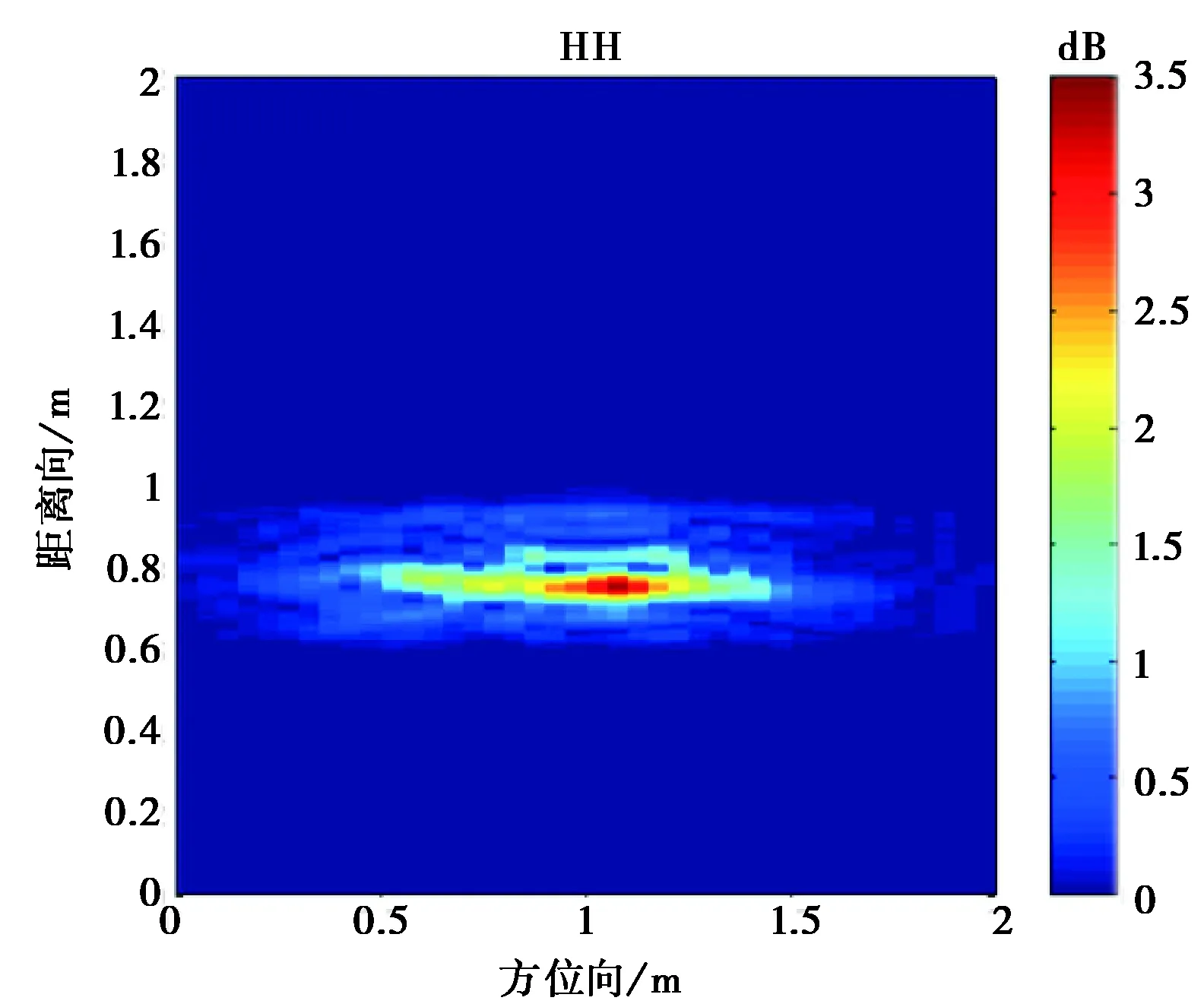
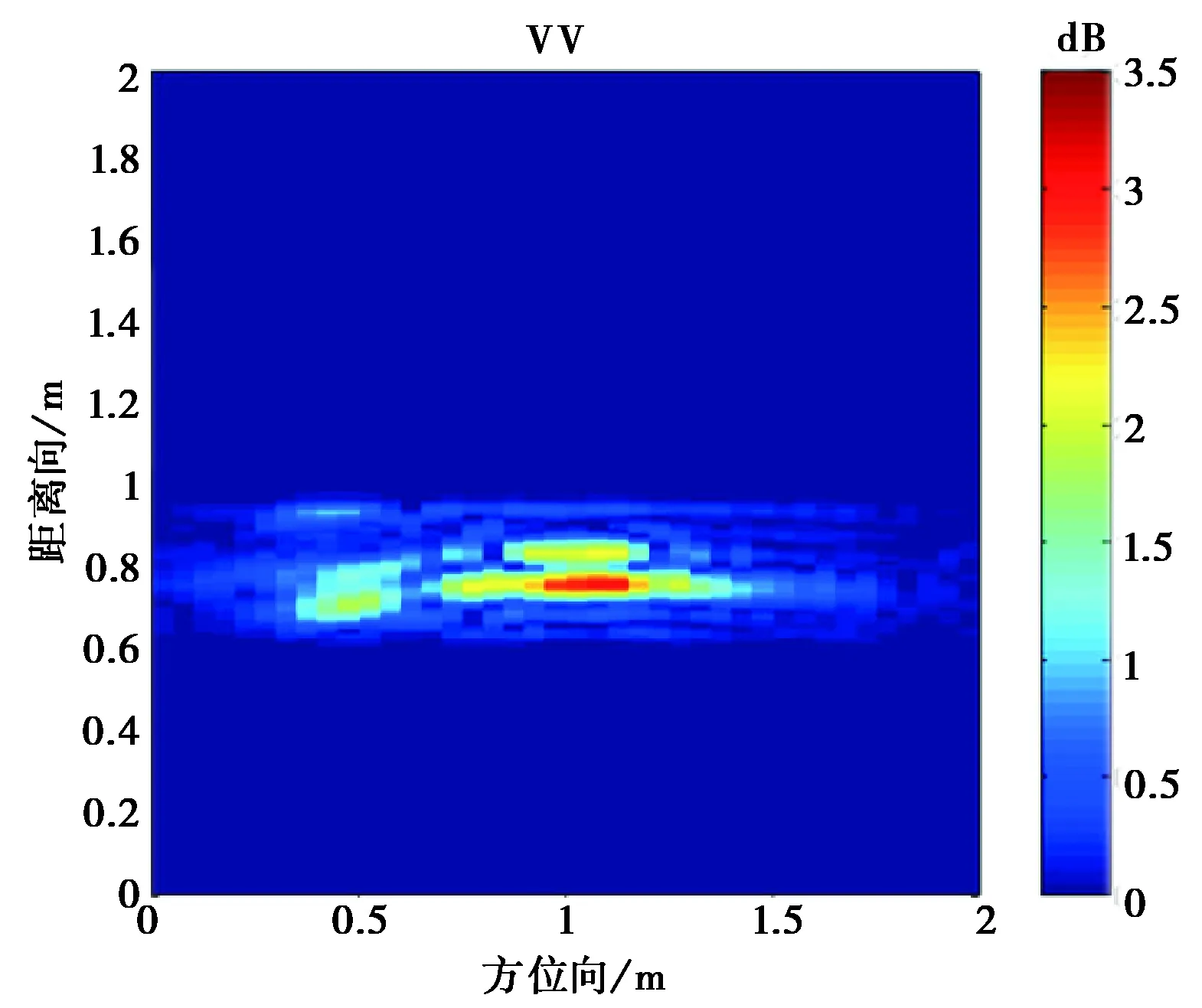
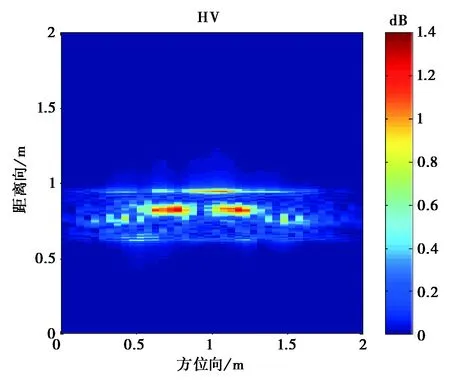
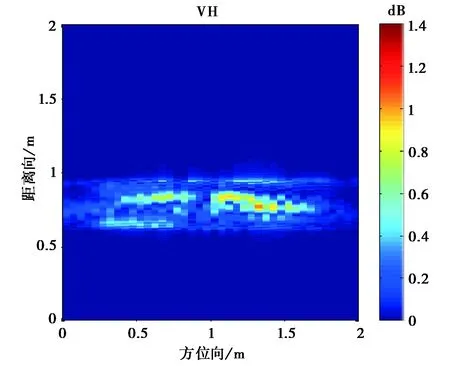
圖12 入射角為30°的坦克模型目標極化成像
從圖10~12成像結果可看到,入射角為0°的時的成像與坦克模型直覺上比較吻合.由于模型表面光滑,鏡面反射很強,使得不同入射角產生的成像結果有比較大的區別.
另外,我們對于樹葉遮蔽下坦克模型的散射也進行了試驗.在樹葉比較稀疏情況下,雷達信號還是能穿過覆蓋的樹葉.可看到,雷達信號有明顯的衰減,而交叉極化卻有一些增強,這是由于樹葉樹枝的散射, 以及樹葉與目標表面的多次散射.
3 FEKO數值計算的驗證
通過FEKO數值計算目標極化散射,對本實驗數據進行驗證.在入射角0°時,用FEKO計算得到的極化散射場HH與HV的成像,結果如圖13所示.
通過對比,數值計算與實驗結果視覺上形狀基本一致,驗證了本實驗.坦克在FEKO中數值計算成像的結果要略大于實驗中坦克成像結果,且在交叉極化的數值結果比實驗結果好.這主要是交叉極化信號弱,實驗中可能的各種干擾會特別影響交叉極化的實驗結果.
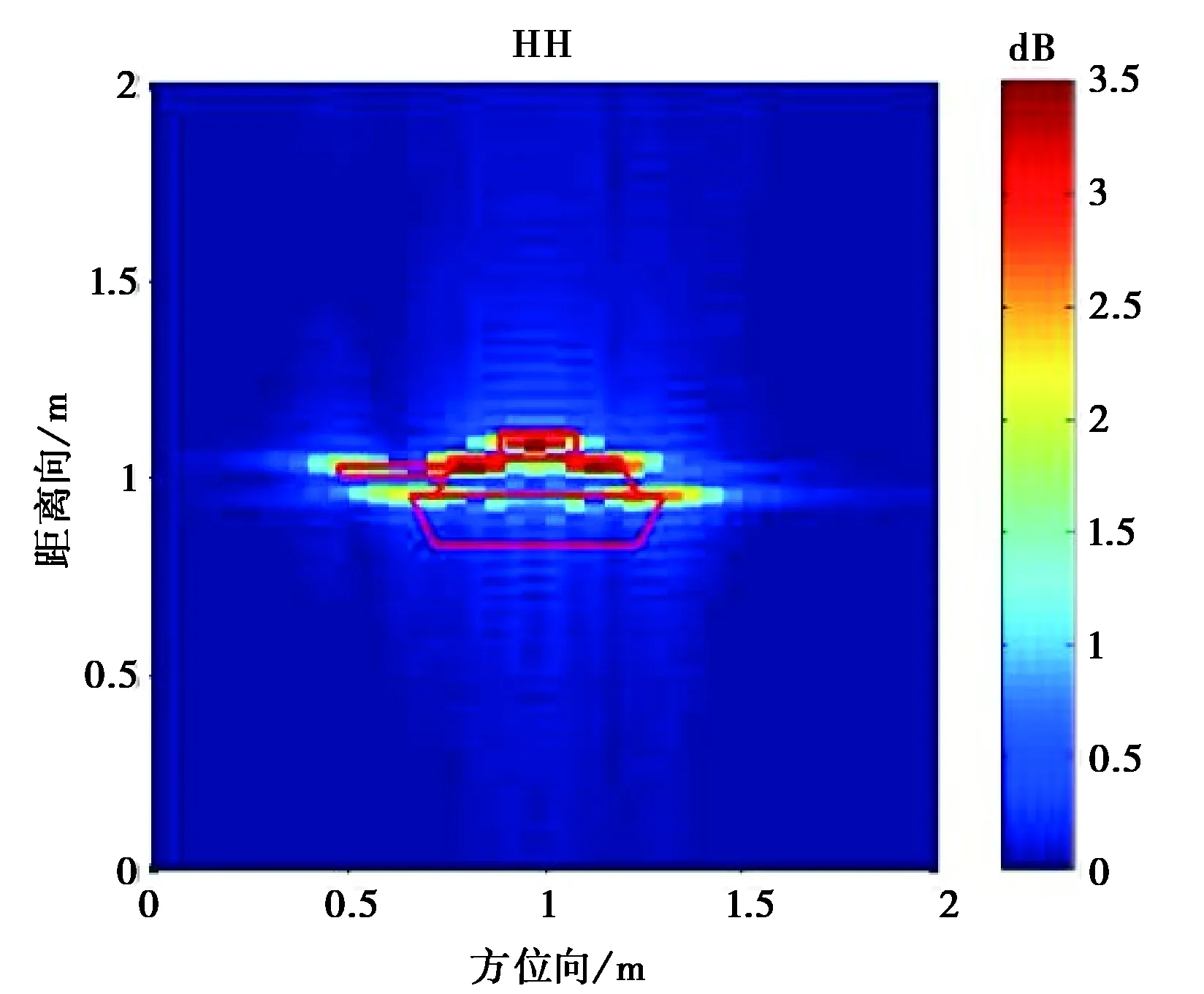
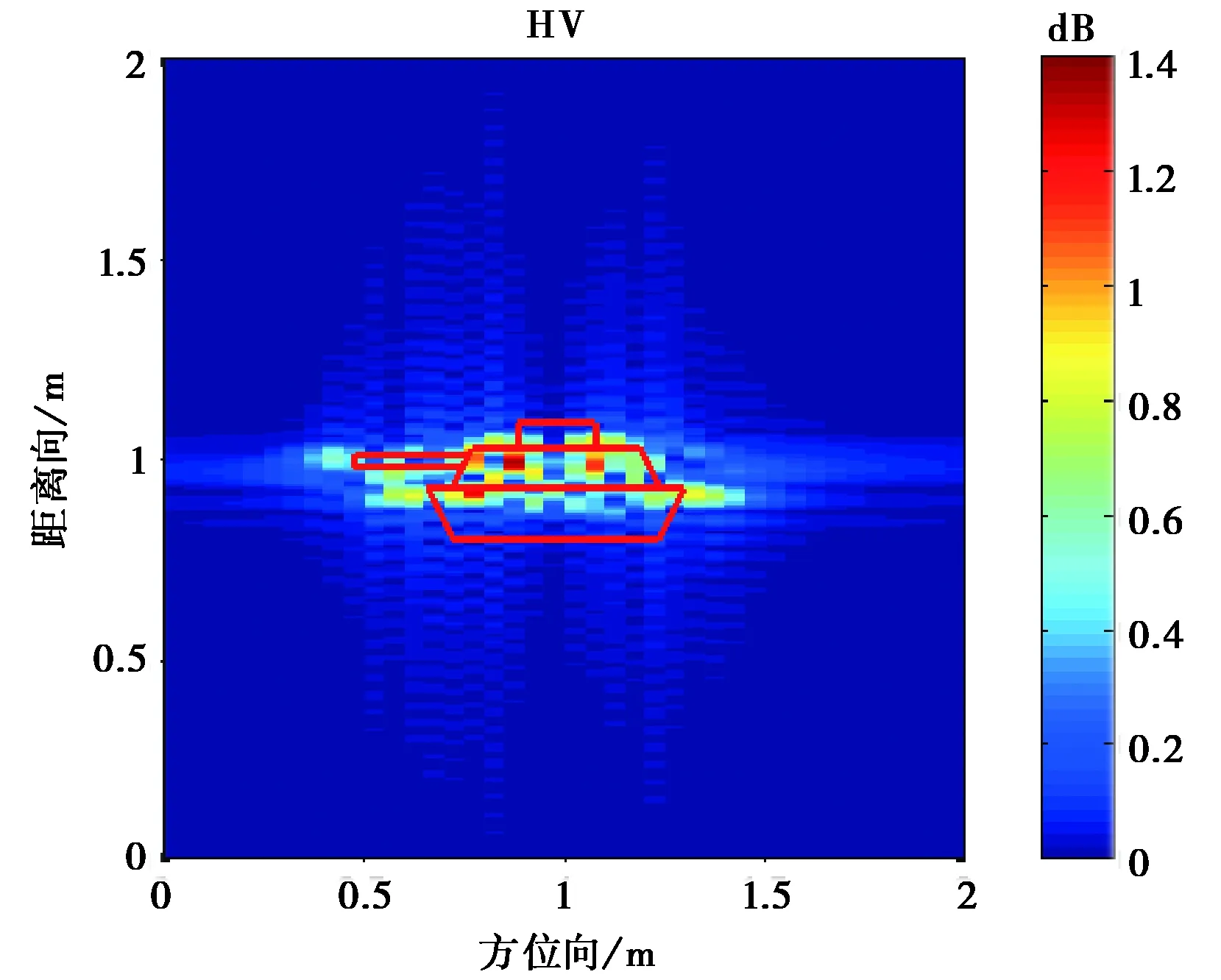
圖13 入射角0°時FEKO數值計算HH,HV散射成像
4 結 論
本實驗室構建了全極化SAR散射成像實驗系統,利用天線平臺的移動合成,測量目標極化散射矩陣,處理得到目標極化二維圖像.
為驗證成像結果,用FEKO數值計算目標的極化散射與成像,比較結果是有意義的.實驗室模擬實驗可有多種實驗設計,模型可靈活選擇.對應的數值計算比較易于進行.另外,對有關內容的教學也大有裨益.
本實驗系統由于種種條件,誤差難以避免.主要誤差包括:采樣周期誤差(采樣率為25 kHz,一個周期內采樣點數可在1 905~1 915之間變化),運動平臺誤差(運行速度為3 cm/s,平臺軌道的不平衡,導致采樣信號的波動),以及極化天線之間的相互耦合帶來的誤差等.
[1] OLVER A D, CUTHBERT L G. FMCW radar for hidden object detection[J]. Radar and Signal Processing, IEE Proceedings F, 1988, 135(4): 354-361.
[2] LIAU T F, CARR A G, CUTHBERT LG. Using non-Fourier techniques in signal processing for an FMCW hidden-object detection radar[J]. Electronics Letters, 1986, 22(9): 466-467.
[3] KAPILEVICH B, PINHASI Y, ANISIMOV M, et al. FMCW MM-wave non-imaging sensor for detecting hidden objects[C]// IEEE MTT-S International Microwave Workshop Series on Millimeter Wave Integration Technologies (IMWS). Sitges, September15-16, 2011: 101-104.
[4] FITCH J P. Synthetic Aperture Radar[M]. New York: Springer-Verlag, 1988.
[5] WANG H, JIN Y Q. A novel polarimetric FM-CW radar system for laboratory remote sensing experiments[C]// Proceedings of the 2010 International Symposium on Antennas, Propagation &EM Theory. Guangzhou, November 29-December2, 2010: 662-665.
[6] META A. Signal Processing of FMCW Synthetic Aperture Radar Data[D]. Delft: Delft University of Technology, 2006.
[7] 張 軍, 毛二可. 線性調頻連續波SAR成像處理研究[J]. 現代雷達, 2005, 27(4): 42-45.
ZHANG Jun, MAO Erke. A study on LFMCW signal processing[J]. Modern Radar, 2005, 27(4): 42-45.(in Chinese)
[8] NAKAMURA M, YAMAGUCHI Y. Real-time and full polarimetric FM-CW radar and its application to the classification of targets[C]// IEEE Trans Instrum Meas, 1998, 47(2): 572-577.
[9] YAMAGUCHI Y, NISHIKAWA T, SENGOKU M. Two-dimensional and full polarimetric imaging by a synthetic aperture FM-CW radar[J]. IEEE Trans Geosci Remote Sens, 1995, 33(2): 421-427.
[10] 李海寧, 趙 健, 洪 文, 等. 基于分數傅立葉變換的SAR成像算法研究[J]. 遙測遙控, 2007, 28(1): 20-24.
LI Haining, ZHAO Jian, HONG Wen, et al. SAR imaging algorithm based on fractional fourier transform[J]. Journal of Telemetry, Tracking and Command, 2007, 28(1): 20-24.(in Chinese)
[11] KEEN K M. New technique for the evaluation of the scattering cross-sections of radar corner reflectors[J]. IEE Proceedings, 1983, 130(5): 322-326.
[12] CURLANDER J C, MCDONOUGH R N. Digital Processing of Synthetic Aperture Radar Data: Algorithms and Implementation[M]. Boston: Artech House, 2005.
[13] FREEMAN A. SAR calibration: an overview[J]. IEEE Transactions on Geoscience and Remote Sensing, 1992, 30(6): 1107-1121.
[14] 胡楚鋒, 許家棟, 李南京, 等. 全極化SAR半實物仿真系統[J]. 系統工程與電子技術, 2010, 32(7): 1537-1539.
HU Chufeng, XU Jiadong, LI Nanjing, et al. Full-polarization synthetic aperture radar hard-in-loop system[J]. Systems Engineering and Electronics, 2010, 32(7): 1537-1539.(in Chinese)
[15] 保 錚, 邢孟道, 王 彤. 雷達成像技術[M].北京: 電子工業出版社, 2005.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
光學精密工程(2016年6期)2016-11-07 09:07:19
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
核科學與工程(2015年4期)2015-09-26 11:59:03
