基于加權波束形成的STAP抗干擾改進算法
2013-06-23 09:47:06楊陽,王藝
電子設計工程 2013年17期
楊 陽,王 藝
(西北工業大學 電子信息學院,陜西 西安 710072)
空時自適應處理(STAP)技術早在1972年被Frost等人首次提出[1]。起初STAP技術由于其優良的抗干擾特性,被應用在雷達、導航等相關領域。但隨著GPS系統在20世紀90年代末逐漸成熟商用后,STAP技術才首次被應用在GPS抗干擾接收機上[2]。STAP技術繼承了時域濾波和空域濾波的優良特性,對窄帶干擾和寬帶干擾都有很好的抑制效果。
加權自適應波束形成[3]是利用信號同干擾的不同來向,進行空間濾波,具有很強的抗干擾能力。通過對陣元接收信號進行復數加權,既進行了相位的校正,也進行了幅度的校正。在一定的準則下進行這種校正后,可以得到最大信干噪比的輸出,即不僅使主瓣對準了期望信號,也使零陷對準干擾。
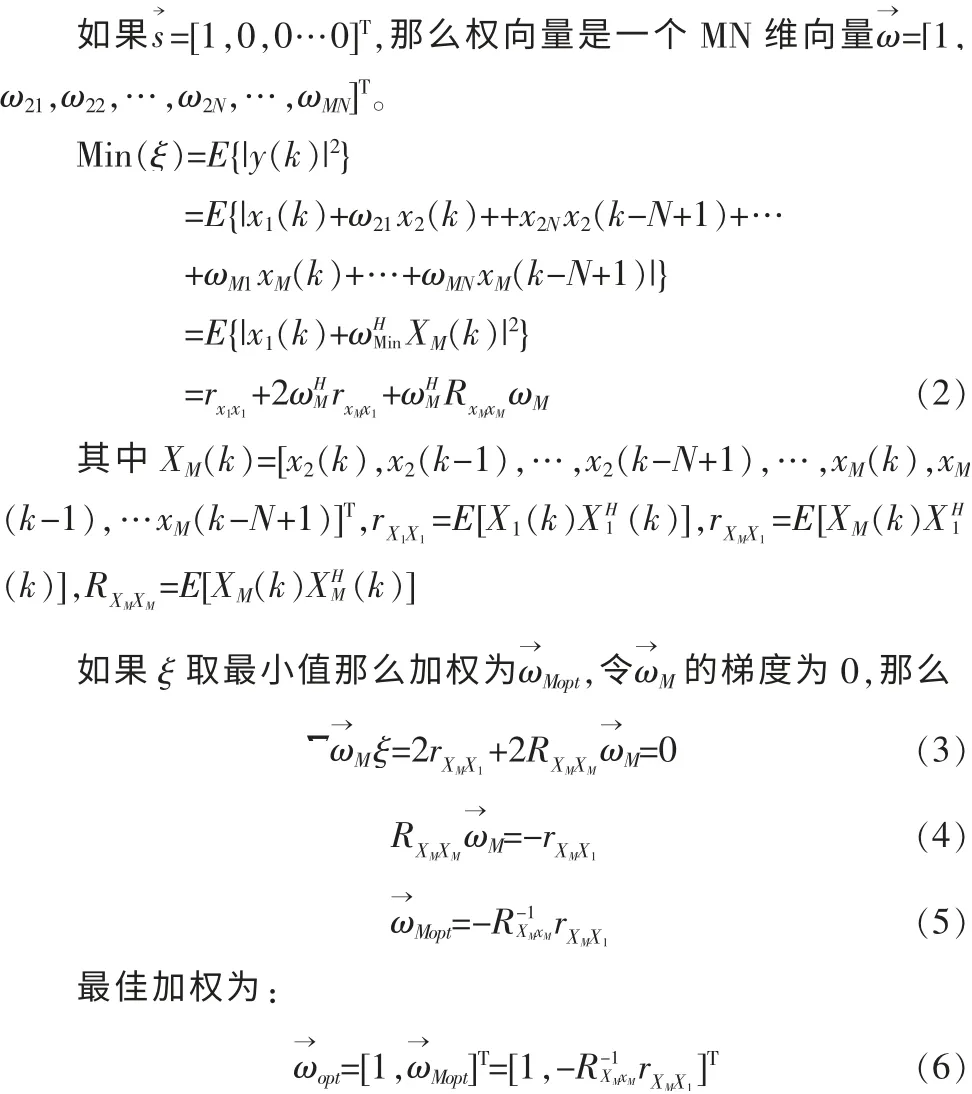
本文提出了一種基于加權波束形成的STAP改進抗干擾方法,該方法不需要干擾位置的先驗信息,可以進行盲干擾抑制,并且能夠很好的兼顧調零深度與衛星信號增益的矛盾,能夠很好的達到既能抑制干擾又能增強信號的目的,顯著提高了輸出信干噪比。總功率Pout=E{|y(k)|2}最小化,同時保證期望信號s→的陣列增益不變。傳統STAP算法是在干擾方向上形成零陷,零陷的寬度由干擾信號的譜寬決定。干擾信號的功率越強,零陷的深度越深。衛星導航信號到達接收機的功率非常微弱,一般小于噪聲功率20~30 dB,功率倒置算法對導航信號的影響很小。因此,功率倒置算法也等價于最大輸出信噪比算法。
1 傳統的GPS抗干擾STAP算法
圖1是傳統STAP算法的結構框圖[4]。空時自適應處理器由M個陣列元素組成,2-M通道由N次FIR濾波器組成,對應的權值功率倒置算法使輸出
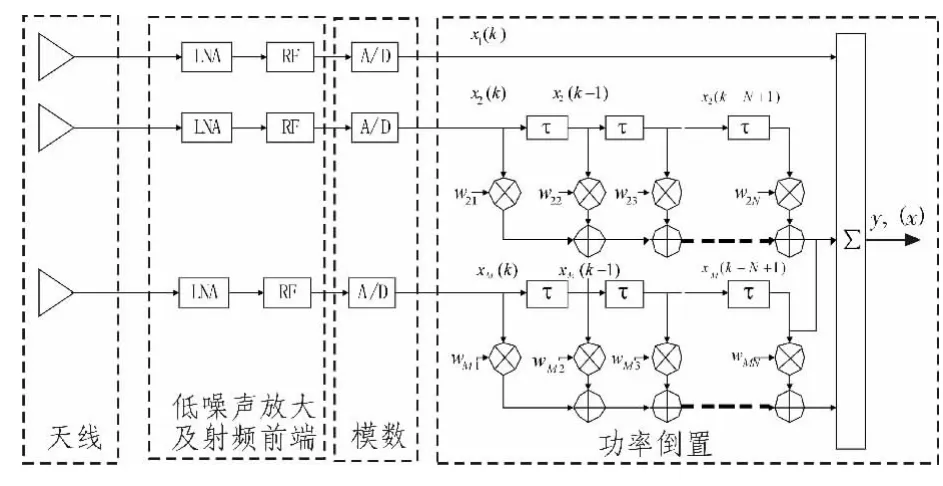
圖1 基于功率倒置算法STAP的結構框圖Fig.1 The structure of STAP based on power inversion


從式(1)中可看出,功率倒置算法本質上是一種有嚴格約束條件()的自適應算法。
2 加權波束形成原理
波束形成[5]就是根據傳感器陣列輸出數據重構來自某方向的期望信號,同時抑制干擾和隨機噪聲。波束形成技術是衛星通信和移動通信領域的一項關鍵技術,它能夠根據通信環境的變化自適應地在干擾方向形成零陷,在所有期望信號方向形成接收波束,從而顯著提高信干噪比。
加權波束形成方法就是要對特定幾何形狀和尺度陣列的波束圖,按某種要求進行控制,也叫做“束控”。通常要對波束圖進行控制的項目有:主波束出現的方位,主瓣寬度和旁瓣級的高低以及旁瓣結構等。對于一定幾何形狀的陣列,對各個陣元接收信號施加不同的權值w(θs),可以得到滿足不同要求的指向性函數。通過調整各陣元的幅度分布來實現控制波束圖的方法稱為幅度束控;而通過調整各陣元相位分布來實現控制波束圖的方法稱為相位束控。相位束控可以通過改變波束形成向量的輻角實現,從而使波束主瓣對準不同的方向。
2.1 均勻加權波束形成
均勻加權波束形成就是對陣列各陣元的輸出信號進行相同的幅度加權,只是施加為使主波束方向指向期望方向所需要的相應的時間延遲,對應的波束形成向量可以表示為w(θs)=a(θs;fc)。不難看出,若從空間θs方向入射一信號時,N元陣列的輸出響應為最大。對于N元均勻分布線陣列有:

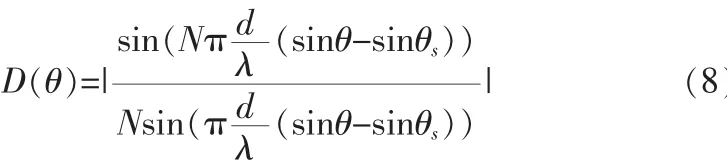
可以求得,N元均勻分布線陣列經均勻加權后,指向θs方向的歸一化指向性函數為:
2.2 Dolph-Chebyshev加權波束形成
對陣元進行幅度加權的目的在于改善陣的方向性。常用的標準有:在給定旁瓣高度的要求下獲得最窄的主瓣寬度;在給定主瓣寬度的條件下獲得最低的旁瓣級;在一定陣元數下,滿足給定的主旁瓣高度之比等等。為了降低旁瓣區域來的干擾的影響,我們通常希望盡量降低波束的旁瓣級,這就需要在補償時間延遲的同時,對各陣元的輸出信號進行一定的幅度加權。幅度加權的方式有很多種。
Dolph-Chebyshev加權加權具有以下兩個特點:
1)在給定的任意旁瓣級下,Dolph-Chebyshev加權能使主瓣寬度最窄;
2)在給定主瓣寬度的條件下,Dolph-Chebyshev加權能使旁瓣級最低。
這兩個特點使得Dolph-Chebyshev加權成為均勻線列陣中最為常見的加權方式。采用Dolph-Chebyshev加權時,各陣元的加權系數由公式可以求出。我們假定N為陣元總數,i為陣元號,w(i)為第i號陣元上的加權。
當N為偶數時,計算公式為:
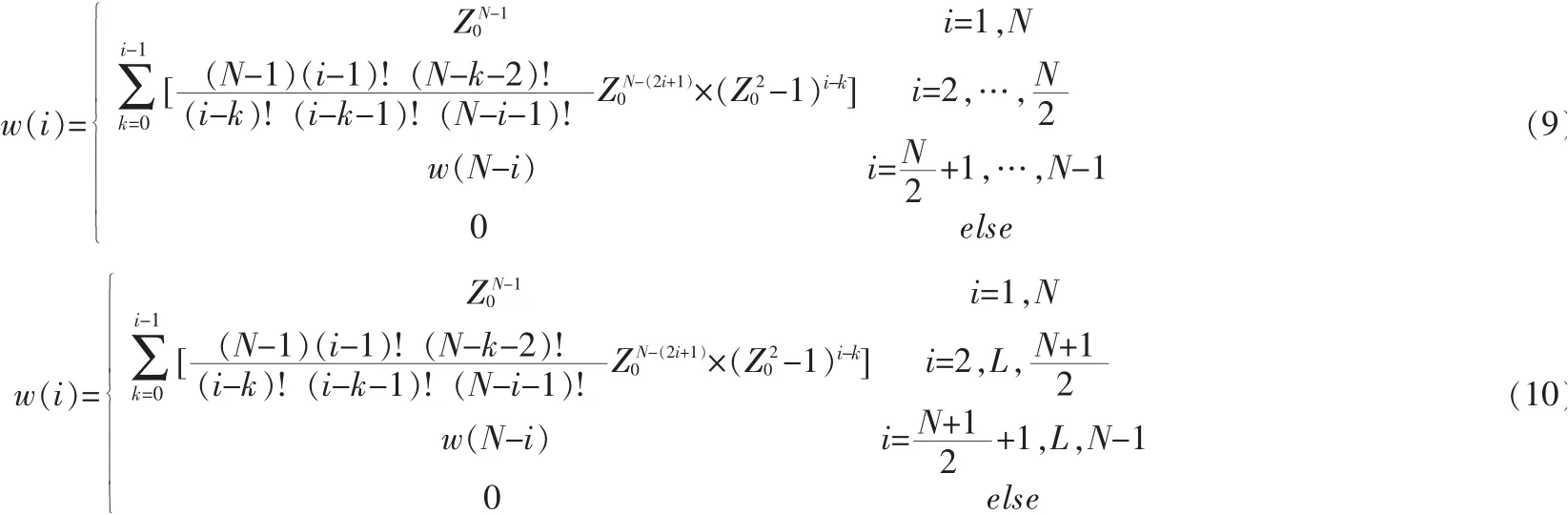
當N為奇數時,計算公式為:
3 性能仿真
實驗一:提高輸出信干噪比實驗
根據式(7)、(8),取N=7,d=0.05,λ=0.1,θs=10°。可得波束圖的仿真圖形如圖2所示。
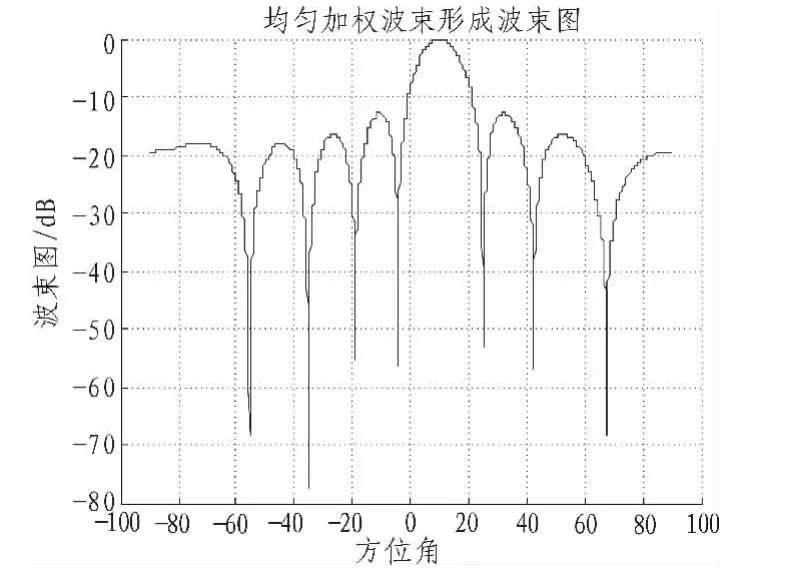
圖2 均勻加權波束形成波束圖Fig.2 Evenly weighted beam-forming
取N=16,d=0.05,λ=0.1,θs=10°,對 均 勻 波 束 形 成 加 以Dolph-Chebyshev窗,可得仿真圖形如圖3所示。
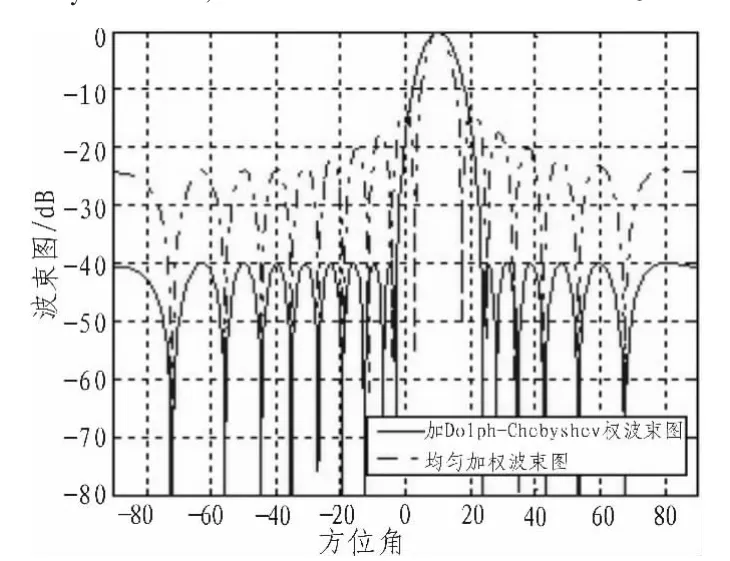
圖3 Dolph-Chebyshev窗波束形成圖Fig.3 Dolph-Chebyshev window beam-forming
從圖3中可以明顯的看出,加窗以后可以降低旁瓣級,同時大大增加了主瓣寬度,從而增加了輸出信干噪比。然后將SNR設置為-32 dB,輸入信干比為-50 dB。快拍數從100移動至500,改進STAP算法和傳統STAP算法輸出的信干噪比如圖4所示,改進的算法在小快拍數下有顯著的優勢。但是隨著快拍數的增加,優勢逐漸減小。所以文中提出的改進算法在小快拍數條件下改善輸出信干噪比有著非常好的效果。
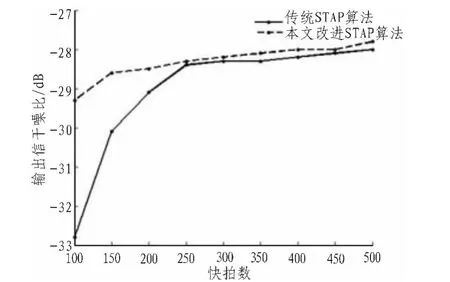
圖4 改進的STAP算法與傳統算法的輸出信噪比比較Fig.4 Comparison between improved STAP algorithm and traditional algorithm on SINR
實驗二:抑制同方向窄帶干擾實驗
窄帶干擾設置為載波頻率的點頻信號,寬帶干擾設置為信號帶寬相同的高斯白噪聲。采用7元均勻線陣天線,陣元間距為半波長,期望信號的波達方向(DOA)是0°,兩個不相干的寬帶干擾波達方向分別是20°和45°,另外一個窄帶干擾與期望信號同向設置為0°。
如圖5所示,傳統的STAP算法對20°和45°的寬帶干擾抑制效果很好,但是當窄帶干擾和期望信號來自同方向時,在該方向(0°)產生了零陷,因此對期望信號也產生了很大的抑制。
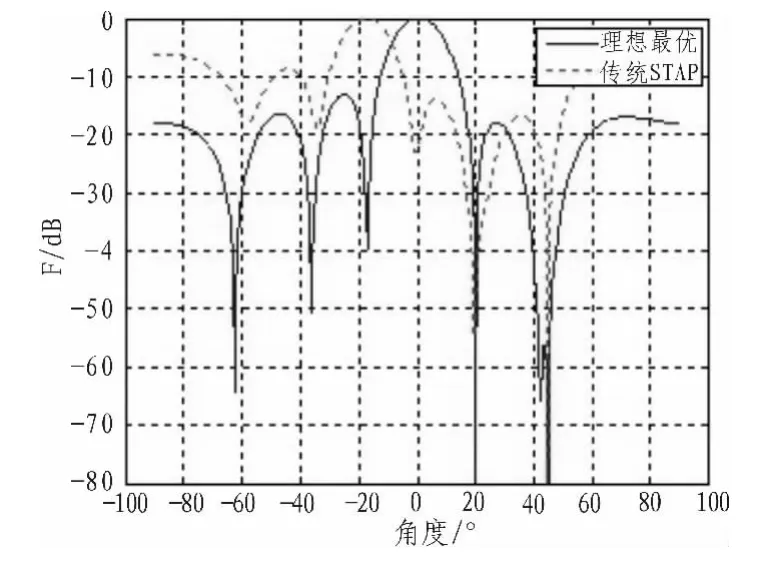
圖5 傳統的STAP算法仿真結果Fig.5 Traditional STAP simulation result
如圖6所示,改進后的STAP算法不僅對20°和45°的寬帶干擾有很好的擾抑效果,而且并沒有對0°期望信號產生抑制,因為同方向的窄帶干擾提前已經被濾除。改進的算法很接近理想最優的輸出(前提是沒有任何干擾和噪聲條件下的輸出)。

圖6 改進的STAP算法仿真結果Fig.6 Improved STAP simulation result
4 結 論
當接收機接收不同方向的干擾和導航信號時,干擾可以被傳統接收機有效地抑制。但是,當干擾和導航信號來自同一方向的時,傳統的STAP算法會在該方向產生很深的零陷,從而濾除一部分有用導航信號。本文提出的結合加權波束形成STAP算法,不僅有效地抑制寬帶干擾和窄帶干擾,同時也大大地增加了小快拍數情況下的輸出信干噪比,對于干擾源快速變化和高動態環境下GPS接收機的抗干擾技術,有著非常廣泛的實際應用價值
[1]O.L.Frost.An algorithm for linearly constrained adaptivearray processing[J].Proceedings of the IEEE,1972,60(8):926-935.
[2]Wang Y L,Peng Y N.Space-time adaptive signal processing[M].Beijing:Tsinghua University Press,2000.
[3]王永良,陳輝,彭應宇,等.空間譜估計理論與算法[M].北京:清華大學出版社,2004.
[4]馮起,呂波,朱暢.功率倒置自適應陣抗干擾特性研究[J].微波學報,2009,25(3):87-91.FENG Qi,LV Bo,ZHU Chang.Anti-interference characteristics research of power inversion adaptive array[J].Journal of Microwaves,2009,25(3):87-91.
[5]羅玉蘭,景永剛,許偉杰.多波束形成方法及其實現[J].2007,26(4):316-319.LUO Yu-lan,JING Yong-gang,XU Wei-jie.The multi-beam forming method and implementation[J].2007,26(4):316-319.
[6]郭藝.GPS接收機空時抗干擾理論與實現關鍵技術研究[D].長沙:國防科技大學,2007.
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
鴨綠江(2021年35期)2021-04-19 12:24:18
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
