雙向可控硅觸發電路在砌塊成型機中的應用研究
2013-06-26 11:34:20楊德沛曾盛綽周文景黃海秋
裝備制造技術 2013年6期
關鍵詞:單片機
楊德沛,曾盛綽,周文景,黃海秋
(廣西大學 機械工程學院,廣西 南寧530004)
一般來說,微機控制系統控制器輸出功率較小,只能輸出低電平、小電流信號,而被控對象通常是大功率設備,要求高電壓、大電流控制[1]。本文研究的基于PIC單片機控制的混凝土砌塊成型機系統是一個典型的微機控制系統,其主要機械動作由各種交流電機相互協調工作完成的,交流電機以交流接觸器作為驅動器。為了實現PIC單片機和各交流接觸器之間的功率轉換,本系統選用雙向可控硅作為開關器件,一方面,可通過PIC單片機控制雙向可控硅的通斷時間,控制各交流接觸器的動作,達到了弱電對強電控制的目的[2];另一方面,雙向可控硅是一種無觸點開關器件,在電路斷開瞬間不會造成接點間的電火花或者電弧干擾,且對抑制瞬變噪聲有明顯的效果。雙向可控硅的觸發電路有多種,本文研究的是一種通用可靠的觸發電路及其在PIC單片機控制的混凝土砌塊成型機中的應用。
1 雙向可控硅的特點及觸發電路要求
雙向可控硅是在普通可控硅的基礎上發展起來的,其是一種雙向三端器件,外部引出三個極,內部是一種N—P—N—P—N型五層結構,可看成由兩個P—N—P—N型結構的普通可控硅反極性并聯組成(見圖1),其特性曲線如圖2所示。其能夠實現弱電到強電、小功率到大功率的轉換,具有無火花、動作快、壽命長、可靠性高[3]以及簡化電路等優點,被廣泛應用于各種控制領域。

圖1 雙向可控硅結構
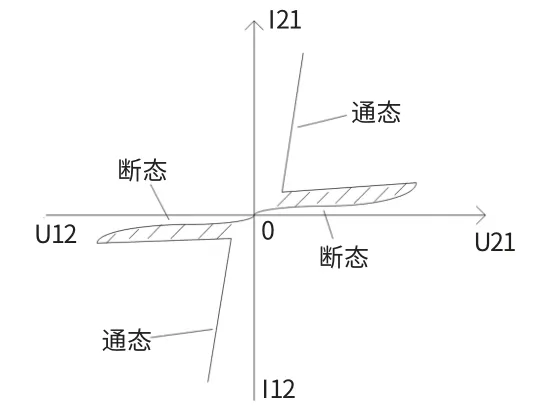
圖2 特性曲線
由于雙向可控硅具有雙向導通的特性,在其主電極上無論施加正向電壓或者反向電壓,也不管觸發信號是正極性還是負極性,其都能被觸發導通,因此其有四種觸發模式,如圖3所示。雙向可控硅的關斷,則需把負載電流降到維持電流IH之下,且該電流需保持一段時間,直至載流子基本從PN結中撤出,在導通半周的終點實現關斷,否則在兩主電極之間的電壓再度上升之前,雙向可控硅不能切換至完全關斷的狀態,就有可能在沒有門極電流作用的情況下,回復導通狀態。因此,確保雙向可控硅狀態正確的切換,是我們在實際控制應用中應考慮的重點之一。

圖3 雙向可控硅四種導通模式
2 觸發電路的設計
在實際工業控制中,常見的雙向可控硅觸發方式有兩種[4~5]:一種是采用移相觸發方式,如圖4(a)所示,該觸發方式改變了正常的波形,會對工廠電網產生沖擊和干擾,并且在閉環控制時,難以保證正負半波面積相等,可能導致直流分量生成,當控制角較小時,功率因數較低;另外一種是采用過零觸發方式,如圖4(b)所示,利用通斷比控制交流調壓,在電源電壓過零時就控制雙向可控硅導通和截止,即控制角為零,通過控制門控信號高電平時間T2,控制可控硅導通時間,這樣可以在負載上得到完整的正弦波,既不會造成電網的干擾,又能可靠地觸發雙向可控硅。因此,本文研究的混凝土砌塊成型機控制系統的雙向可控硅觸發方式選擇過零觸發。
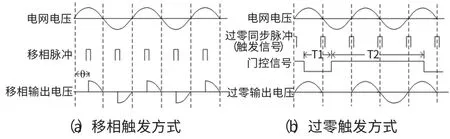
圖4 雙向可控硅移相觸發和過零觸發比較
單相電網中常用的過零觸發方式有以下兩種:
(1)直接從單相電網中取出過零脈沖
電路如圖5所示。單相電壓經全波整流橋BG整流后變成全波整流電壓,考慮到電網可能出現強干擾信號,因此本電路采用兩級限幅,由R2和D1將電壓降至14 V左右,再經電阻R3和穩壓管D2二次限幅,送至三極管TQ進行放大、倒相,從三極管的集電極取出過零脈沖。該脈沖信號與PIC單片機發出的門控信號經與門比較,當門控電壓為高電平時,輸出過零脈沖,以此驅動雙向可控硅通斷,達到控制交流接觸器目的。R1為泄放電阻,電路用C1,C2,C3進行濾波。
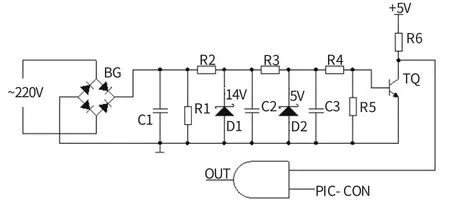
圖5 直接從單相電網中取出過零脈沖
(2)專用雙向可控硅集成驅動電路
MOC3061系列過零觸發隔離雙向晶閘管驅動器(如圖6)是一種專用于驅動雙向可控硅的驅動器件,采用光電耦合方式,不但具有隔離功能,而且還可以作為開關器件用于輸出通道,直接用于高壓及大電流工作場合。其最大的特點是內部集成了過零檢測電路,極大地減少了觸發電路的外圍器件,減少功率耗散,且能用TTL電平驅動,很容易與微處理器接口,進行各種自動控制設備的實時控制,非常適合用作本系統的雙向可控硅觸發電路。
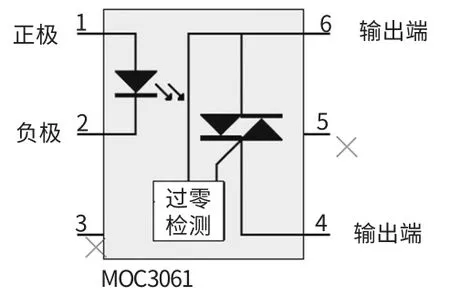
圖6 MOC3061過零觸發隔離雙向晶閘管驅動器
通過比較以上兩種過零觸發方式,第一種直接從電網取出過零脈沖,容易引入噪聲干擾,而且使用元器件較多,可靠性不足;第二種使用光電隔離,電路簡單,更容易與單片機進行聯機控制,且相對可靠,因此本系統主要研究的是第二種過零觸發方式。
3 在基于PIC單片機控制的混凝土砌塊成型機中的應用研究
在砌塊成型機系統中,交流接觸器及其驅動的交流電機屬于電感性負載,常伴有干擾電網和自干擾的現象。因為當雙向可控硅控制交流接觸器電路斷開或閉合時,接觸器線圈中的電流通路被突然切斷,電壓變化率極大,會產生一個很高的感應電壓,該電壓通過電源的內阻加在開關觸點的兩端,然后一次次放電,直到低于放電所必須的電壓為止。這一過程將產生極大的具有很高幅度和很寬頻率的脈沖束,疊加在供電電壓上,并且把干擾傳給供電線或以輻射形式傳向周圍空間,形成一個很強的噪聲源。在這種電子噪聲充斥的工作環境中,若干擾電壓超過雙向可控硅的導通電壓VGT,并有足夠的門極電流,就會發生假觸發,導致雙向可控硅切換,甚至造成嚴重后果。因此,在設計雙向可控硅的觸發電路時,一定要將這個噪聲考慮在內。
另外,電感性負載的電壓和電流波形間存在相位差(電壓超前電流),當負載電流為0時,電壓為反向電壓,加上感性負載的自感電動勢e1,使得雙向可控硅承受電壓遠超過電源電壓,容易被擊穿。當負載電流過零時雙向可控硅發生切換,由于相位差電壓并不為零,這時雙向可控硅須立即阻斷該電壓。在這過程中產生的切換電壓上升率dV/dt若超過允許的dVCOM/dt,會迫使雙向可控硅回復導通狀態,這就可能導致雙向可控硅切換失敗。因此,應在T1和T2之間接上RC吸收電路,一方面吸收交流線圈產生的感應電動勢e1,另一方面限制切換產生的電壓上升率,還可以防止電源中帶來的尖峰電壓、浪涌電流對雙向可控硅的沖擊和干擾,防止假觸發的出現。一般要取R1選用能承受浪涌電流的碳膜電阻,阻值約為幾歐到幾十歐,C1取0.01μF~1.0μF。電阻功率可按以下公式計算:
MOC3061的發光器件是一個砷化鎵二極管,在5~15 mA的正向電流下發出足夠強度的紅外光。輸出部分是一個光敏雙向晶閘管,其主電極間的電壓接近零時,在紅外光作用下能雙向導通。因此,為了保證MOC3061的光敏雙向晶閘管可靠觸發,設計電路時應保證砷化鎵二極管的正向電流大于或者等于其觸發電流IFT=15 mA,在本系統中,可取IFT與最大IF之間的值。在輸入回路上還可引入一個普通LED指示燈,與MOC3061內部砷化鎵二極管一樣,它們導通的壓降都約為1.4 V,所以計輸入限流電阻算如下:

由于MOC3061的輸出端峰值重復浪涌電流IP最大值不能超1A,因此輸出端須串一個電阻R以限制當電路空載時的電流。本系統連接的負載是電感性負載,考慮電感的影響,觸發外部雙向可控硅的時間會延長,流經MOC3061輸出端的電流會增加,所以輸出端限流電阻計算如下:

式中,VP為交流電路峰值電壓,在引入R之后,MOC3061就有了一個最小觸發電壓,若輸出端電壓低于該電壓,外部雙向可控硅不能被觸發導通,直到輸出端電壓高于該最小觸發電壓值才導通。還必須注意,MOC3061在輸出關斷的狀態下也有小于或等于500μA的漏電流通過,為了消除這個漏電流輸出對雙向可控硅門極的影響而導致誤觸發,在門極與T1極之間加入一個RG=300歐的電阻,還可并上一個0.01 F的電容,這樣就可以降低雙向可控硅的門極靈敏度。
經反復研究實驗,最終確定基于PIC單片機控制的雙向可控硅可靠觸發電路如圖7所示。
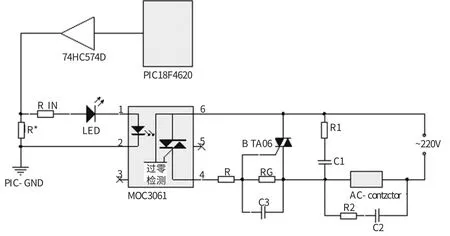
圖7 基于PIC單片機控制的雙向可控硅可靠觸發電路圖
圖中MOC3061輸入電流設計為17mA,R2和C2的作用也是抑制交流接觸器通斷時產生的瞬變噪聲。當PIC單片機控制端輸出低電平,在輸出端電壓過零時,MOC3061內部的過零檢測電路發出觸發信號,光敏雙向晶閘管導通,接著驅動的雙向可控硅也導通。反之,單片機輸出高電平時,雙向可控硅關斷。在實際生產中,將此電路成功應用到廣西潤工機械有限公司生產的QTM系列全自動混凝土砌塊成型機系統中,控制流程如圖8所示。該電路實現了用PIC單片機控制各路雙向可控硅驅動的交流接觸器協調工作,從而實現了對該系統的自動控制,電路觸發可靠,生產檢驗效果良好,達到了預期的控制目的。

圖8 砌塊成型機控制系統基本流程
4 結束語
雙向可控硅過零觸發電路具有避免移相觸發電路對電網造成污染和對周圍電氣設備造成干擾的缺點,因此廣泛應用于各種微機控制系統中。本文介紹的基于PIC單片機控制的雙向可控硅觸發電路,利用MOC3061系列過零觸發隔離雙向晶閘管驅動器作為驅動元件,電路簡單,觸發可靠,容易與PIC單片機接口連接,進行混凝土砌塊成型機的實時控制,成功實現了用低電壓/小電流控制高電壓/大電流的負載,使生產過程控制的精確度比以前有了很大提高,從而也提高了設備的性能指標和運行效率。
[1]王幸之,王 雷.單片機應用系統電磁干擾與抗干擾技術[M].北京:北京航空航天大學出版社,2006.
[2]陳振春.雙向可控硅在電動機控制中的應用[J].南昌工程學院學報,2005,24(2):73-76.
[3]黃利生.可控硅過零觸發電路在爐溫控制中的應用[J].金屬制品,2001,27(6):28-32.
[4]樊月珍,毛恩榮.雙向可控硅過零調功調速的技術實現方法[J].中國農業大學學報,2004,9(6):56-59.
[5]王岫光,王曉軍.在單片機控制系統中實現晶閘管的過零控制[J].微機與應用,2001(6):25-27.
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設計工程(2015年15期)2015-02-27 12:07:30
電子設計工程(2015年8期)2015-02-27 12:05:36
