基于模糊邏輯的多傳感器管理算法
2013-06-29 01:47:32崔博鑫許蘊山肖冰松張波雷
電視技術 2013年9期
關鍵詞:分配
崔博鑫,許蘊山,肖冰松,張波雷
(空軍工程大學航空航天工程學院,陜西 西安 710038)
在傳感器管理過程中,由于系統處于極度復雜和多變的外界環境中,威脅目標身份的不確定性、傳感器探測精度的高低、電磁環境與戰場態勢等因素都是模糊的概念,可以采用模糊邏輯的方法來實現多傳感器的管理。Stromberg[1]利用濾波誤差作為控制的輸入,文獻[2]同時引入傳感器視場(FOV),應用模糊控制實現了目標跟蹤過程中的傳感器管理。王放[3]介紹了模糊邏輯在目標識別系統中的傳感器管理方法,但缺乏對目標識別特性和傳感器性能的不確定性度量。
Hintz[4-5]等運用目標格和決策樹度量目標識別的不確定性,但過程過于主觀,識別特性也難以度量。Zadeh提出的Fuzzy集[6]已經應用到信息融合領域[7],但 Fuzzy集輸出的隸屬度是一個單值,不能同時反映支持和反對兩方面信息。Gau和Buehrer提出的Vague集[8]能同時考慮非空元素隸屬度與非隸屬度,在處理不確定信息時比Fuzzy集有更強的靈活性和表達能力。
本文利用自適應神經模糊推理系統模糊化傳感器性能,結合Vague度距離表達的目標不確定性,運用模糊推理規則,提出了一種基于模糊邏輯的多傳感器管理算法。
1 基于Vague集的目標不確定度
1.1 Vague 集
令X={x1,x2,…,xn}為一個點(對象)的空間,其中的任意一個元素用x表示。針對多個未知目標的多個識別特性,歸一化后得到特征矩陣R,給出合理的滿意度下界L和不滿意度上界U,可以得到目標Oj的屬性集:
Fj={ai|rij>L},表示目標Oj的支持屬性集,rij為目標Oj的第i個識別特性的值;
Aj={ai|rij<U},表示目標Oj的反對屬性集;
Nj={ai|U≤rij≤L},表示目標Oj的中立屬性集。
令

式中:tA(Oj)表示目標Oj的支持度,其中Ij={i|ai∈Fj};wi表示各識別特征的熵權矢量。同理可得目標Oj反對度fA(Oj)和中立度hA(Oj)。進行歸一化處理,得到目標相對于模糊集“滿意”的隸屬度。

式中:t(Oj)為目標Oj相對于模糊集“滿意”的真隸屬度;同理,可以得到相對于模糊集“滿意”的假隸屬度f(Oj)和不確定度h(Oj)。
顯然,有t(Oj)+f(Oj)≤1,t(Oj)+f(Oj)+h(Oj)=1。
則目標Oj在模糊集上的“滿意”程度可用Vague值表示,即

1.2 目標不確定度
為了度量目標的不確定性,需要計算未知目標Oj與數據庫中每個目標類型的距離。因此,對于目標類型Ok和未知目標Oj,定義目標的Vague度距離[9]為

顯然0≤d(Ok,Oj)≤1。d(Ok,Oj)越大,表明未知目標 Oj與目標類型Ok距離越遠,相似度越低;而d(Ok,Oj)越小,則未知目標Oj與目標類型Ok距離越近,即與目標類型Ok越相似。
假設數據庫中有3類目標,根據式(4),可以得到未知目標與3類數據庫目標的Vague度距離,可以記為d(Oj,Oi),并進行歸一化處理,得

得到d1,d2和d3,兩兩相減可以得到3個Vague度距離的差值。差值越大,說明未知目標為某一類型的可能性越大,不確定性越小;差值越小,則說明未知目標判斷為某一類型越難,不確定性越大。3個Vague度距離差值的算術平均表示未知目標判斷為數據庫所有目標類型(這里假設為3種)的可能性,用1減算術平均表示未知目標不是數據庫中任何目標類型的可能性,即目標識別的不確定性。未知目標Oj的不確定性為

2 算法描述
假設傳感器對目標進行識別,若在k時刻已經得到未知目標的相關信息,可以初步計算目標分類的不確定性,現在要對k+1時刻的未知目標進行進一步的傳感器管理。依照模糊控制方法,選擇k時刻目標分類的不確定性作為模糊控制器的精確輸入。
2.1 精確輸入量映射到相應的模糊集
目標身份的不確定性難以度量,采用Vague集的目標不確定度來表示,將輸入量的論域由低向高劃分為7個等級:VC(Very Certain),C(Certain),M(Medium),MUC(Mid-Uncertain),UC(Uncertain),MVUC(Mid-Very Uncertain)和VUC(Very Uncertain)。模糊隸屬函數通常有鐘形、三角形和梯形,這里采用三角形,則輸入論域的劃分如圖1所示。

圖1 輸入論域的模糊集劃分
在實際目標識別過程中,下一時刻的傳感器分配,應該著重在對不確定性大的目標進行進一步觀測識別,優先分配高精度傳感器。對于不確定性小的目標在保證了其他目標觀測識別后,如果還有多余的傳感器資源,應當予以分配傳感器。在保證對系統中傳感器的管理調度后系統整體識別率能夠提高的基礎上,應當使輸入論域中代表不確定性大的模糊區域覆蓋更為廣泛,并且其上的模糊隸屬函數變化相對緩慢。
2.2 傳感器性能的模糊劃分
將模糊輸出設定為傳感器及其組合的識別性能,傳感器性能的劃分也是一個相對模糊的概念,自適應神經模糊推理系統——ANFIS[10],使用模糊神經網絡技術把環境信息和專家知識引入融合系統,文獻[11]利用模糊推理“如果—則”規則推導出紅外傳感器的可信度。本文選用ANFIS來評價性能可信度,通過模糊邏輯規則表得到傳感器性能置信度,如表1所示。
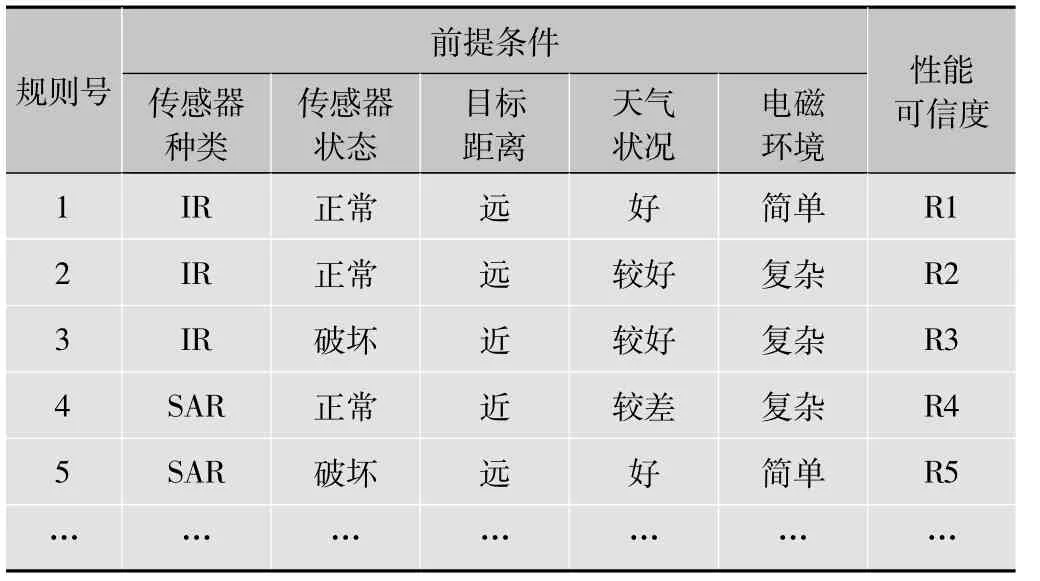
表1 傳感器性能置信度模糊推理規則
傳感器及其組合的模糊級由精度高至低劃分為6個等級:HAG(High Accuracy Group),HAS(High Accuracy Single-Sensor),MAG(Medium Accuracy Group),MAS(Mid-Accuracy Single-Sensor),LAG(Low Accuracy Group)和LAS(Low Accuracy Single-Sensor)。采用三角形模糊隸屬函數,則劃分輸出的論域如圖2所示。

圖2 輸出論域的模糊集劃分
單傳感器的性能映射到相應的模糊集后,傳感器組合的性能也應當根據單傳感器的性能綜合得出。Molina Lopez提出一種簡單的方法[12],例如系統中有兩個傳感器s1和s2,則傳感器組合的精度可以由表2中的規則獲得。

表2 傳感器組合性能組合規則
2.3 模糊推理規則
這里采用最基本的“如果A,那么B”(If A,Then B)類型的模糊推理規則,如下:

經過模糊推理后可以得到模糊控制輸出,即給出待識別目標分配相應的傳感器或傳感器組合。最后對模糊控制的輸出進行去模糊化,去模糊化策略的選擇對模糊控制應用的有效性有直接影響[13]。
3 仿真實驗
假設傳感器系統有3個有源傳感器,分別為合成孔徑雷達(SAR)、電子支援測量(ESM)、敵我識別器(IFF),由于傳感器觀測空域和自身能力的限制,其觀測目標數目為1,2和3個目標,傳感器及其傳感器組合共有7個。3個傳感器表示為s1,s2和s3,根據ANFIS系統設定不同的探測精度,模糊化后分別對應HAS,MAS和LAS這3個模糊集,由表2可以得出系統中傳感器組合的性能,其結果如表3所示。

表3 傳感器性能模糊化結果
假設數據模型有3種目標:殲擊機、巡航導彈和運輸機,目標識別特性分別為多普勒頻移,波長為0.2 m;雷達反射截面積(RCS),以波長為0.05 m,正側向90°±5°的統計平均值為準;角閃爍,采用角閃爍噪聲線偏差的均方根值;角速度特殊形狀點和像素灰度。未知目標設定為5個,多目標識別的數據模型[14-15]如表4所示。

表4 多目標識別數據模型
對每個目標構造Vague集,給出滿意度的下界(0.9)和不滿意度的上界(0.35),運用式(2),計算每個目標的支持、反對和中立屬性度,運用公式(4)~(6),得出未知目標的Vague度距離及目標不確定度,采用三角形隸屬函數,模糊化系統輸入,結果如表5。

表5 未知目標不確定度與模糊化結果
依據模糊控制規則“如果A,那么B”進行模糊推理,輸出模糊結果。在去模糊之前,應充分考慮到單傳感器或傳感器組合的觀測能力,如果分配給傳感器的目標數目超過其觀測能力時,應依據一定的準則進行調整。例如,將分配給該傳感器或組合的目標依據隸屬度大小進行排序,將隸屬度排序靠前且在傳感器觀測能力之內的目標分配給該傳感器,其余的目標分配給性能較差的傳感器或組合。最終的管理輸出結果如表6所示。

表6 基于模糊邏輯的多傳感器管理算法結果
表6中,“1”代表相應的傳感器或傳感器組合分配給目標,“0”表示不分配。從表6中可以看出,單傳感器或傳感器組合均達到了分配目標的最大值,得到了充分的利用。當高性能的傳感器或傳感器組合分配的目標數超出了實際能力時,可以根據威脅目標對該傳感器或傳感器組合的模糊隸屬度由高到低排列,優先滿足隸屬度高的進行分配,其余的目標則可以分配給相鄰的下一性能等級的傳感器或傳感器組合。通過仿真實驗,證明了基于模糊邏輯的多傳感器管理算法在目標識別中的合理性和有效性。
4 結論
基于模糊邏輯的多傳感器管理算法充分利用了模糊控制在復雜系統中的優點,避免了對威脅目標、傳感器低、電磁環境與戰場態勢等因素精確建模的問題,完成了傳感器的管理與調度。本文運用Vague集能同時表達事物支持、反對和中立3種屬性的特點,用Vague度距離表達的目標識別過程中的不確定性,利用自適應神經模糊推理系統度量傳感器性能。通過三角形隸屬函數,將傳感器性能及目標特性模糊化,依據“如果—則”模糊推理規則,提出了一種基于模糊邏輯的多傳感器管理算法,實現了目標識別中的傳感器管理。仿真結果表明,該算法合理有效,有直觀、簡單易行和計算量小等優點,具有很好的工程實踐意義。
[1]STROMBERG D,PETTERSSON G.Parse tree evaluation-a tool for sensor management[EB/OL].[2012 -07 -10].http://isif.org/fusion/proceedings/fusion98CD/741.pdf.
[2]NG G W,NG K H,WONG L T.Sensor management—control and cue[C]//Proc.the Third International Conference on Information Fusion.[S.l.]:IEEE Press,2000:16-21.
[3]王放.融合自動目標識別系統中的傳感器管理策略研究[D].長沙:國防科學技術大學,2004.
[4]HINTZ K J,MCINTYRE G.Goal lattices for sensor management[C]//Proc.SPIE,Signal Processing,Sensor Fusion,and Target Recognition.[S.l.]:SPIE Press,1999:3720-3725.
[5]MCINTYRE G A,HINTZ K J.An information theoretic approach to sensor scheduling[C]//Proc.the SPIE,Signal Processing,Sensor Fusion,and Target Recognition.Orlando,Folrida:SPIE Press,1996:304-312.
[6]BELL M R,ZADEH L A.Decision making in a fuzzy environment[J].Management Science,1970,17(4):141-146.
[7]王毅,雷英杰.基于Vague集的多傳感器信息融合方法[J].計算機技術與發展,2007,17(4):232-235.
[8]GAU W L,BUEHRER D J.Vague sets[J].IEEE Trans.Systems,Man.and Cybernetic,1993,23(2):610-614.
[9]萬樹平.Vague集在多傳感器目標識別中的應用[J].系統工程與電子技術,2009,31(9):2067-2070.
[10]權太范.信息融合神經網絡—模糊推理理論與應用[M].北京:國防工業出版社,2003,211-217.
[11]敬忠良,楊永勝,李建勛,等.基于模糊神經網絡和D-S推理的智能特征信息融合研究[J].信息與控制,1997,26(2):28-32.
[12]LOPEZ MOLINA J M,JIMENEZ RODRIGUEZ F J,CASAR CORREDERA J R.Fuzzy reasoning for multisensor management[C]//Proc.the 21st IEEE International Conference on Intelligent Systems.[S.l.]:IEEE Press,1995:1398-1403.
[13]姚敏.計算機模糊信息處理技術[M].上海:上海科學技術文獻出版社,1999.
[14]黃培康,殷紅成,許小劍.雷達目標特性[M].北京:電子工業出版社,2006.
[15]賈智偉,陳天如,李應紅.基于多傳感器信息融合的目標識別[J].系統工程與電子技術,2003,25(7):810-813.
猜你喜歡
天水行政學院學報(2022年4期)2022-11-18 09:02:36
艦船科學技術(2022年13期)2022-08-11 09:30:02
鐵道通信信號(2020年9期)2020-02-06 09:15:22
漢語世界(The World of Chinese)(2019年3期)2019-07-01 02:37:48
數學大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學科學(學生版)(2019年5期)2019-05-21 01:00:18
中學生數理化·中考版(2018年10期)2018-12-07 00:44:52
經濟技術協作信息(2018年30期)2018-11-22 06:20:24
中央社會主義學院學報(2017年1期)2017-04-16 05:34:07
中國衛生(2014年12期)2014-11-12 13:12:40