一種大規模智能電能表全自動檢定系統設計
2013-07-03 07:06:16黃奇峰蔡奇新
電力工程技術 2013年2期
黃奇峰,蔡奇新,劉 建
(江蘇省電力公司電力科學研究院,江蘇 南京 211103)
目前已經建設的電能表全自動檢定系統大都屬于試驗性質,規模較小[1-3]。根據江蘇省年檢800萬只智能電能表的需要,正在建設的超大規模智能電能表全自動檢定系統,其規劃的倉儲、搬運規模和每天檢定的計量器具數量都將是國內最大,且沒有可以完全照搬的成熟經驗和方案,迫切需要研究適合如此大規模的電能表全自動檢定建設方法。
1 系統總體設計
1.1 工藝流程設計
一種高效的系統組建方案如圖1所示。
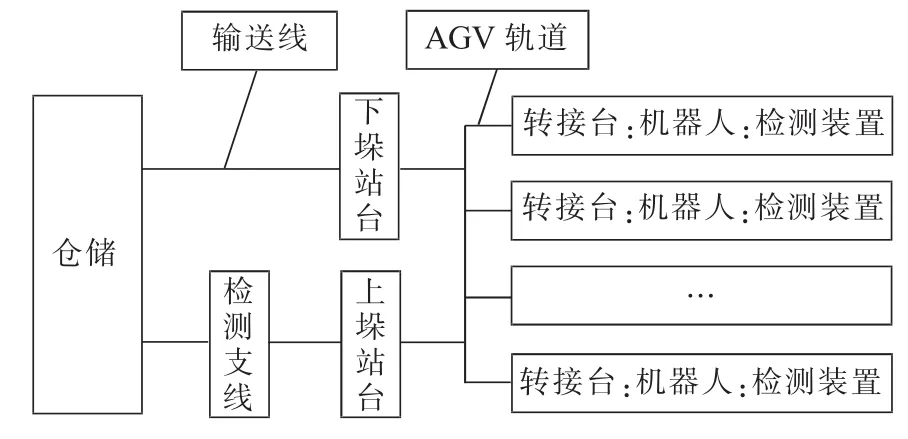
圖1 系統組成
完整的一次電能表檢測過程。
(1)檢定出庫:倉儲中的電能表整垛經輸送線輸送到下垛站臺;
(2)待檢表搬運:AGV將電能表垛從下垛站臺搬運到轉接臺;
(3)機器人掛表:機器人取轉接臺上的電能表,自動分解電能表垛,掃描識別電能表并將其掛在檢測裝置上(簡稱掛表);
(4)檢測裝置檢測:掛表結束,檢測裝置自動執行耐壓試驗、功能和誤差檢測;
(5)機器人下表:檢測結束,機器人將電能表摘下,裝箱、組垛,放回轉接臺(簡稱下表);
(6)已檢表搬運:AGV將轉接臺上檢測過的電能表垛搬運到上垛站臺;
(7)檢測支線:上垛站臺的電能表垛經輸送線輸送,基于流水線模式,完成拆垛、拆箱、外觀檢查、分揀、封印、組箱、組垛等操作;
(8)檢定入庫:合格的電能表整垛由輸送線送回庫房。
基于效率和成本的平衡考慮,每個檢測裝置固定對應若干個轉接臺,一臺機器人負責多個檢測裝置的掛、下表。
1.2 控制系統軟件架構
根據SOA的軟件架構原則,控制系統軟件的架構設計如圖2所示。
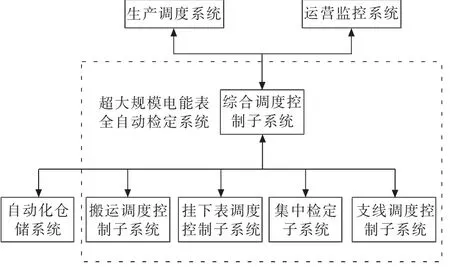
圖2 軟件架構
圖2中,生產調度系統是系統的上級生產管理系統,向系統下發檢定任務;運營監控系統集中監控系統的運行。
綜合調度控制子系統:系統調度控制和通信的中心,主要功能包括接收和管理檢定任務;協調自動化倉儲系統、設備與裝置調度控制系統,調度、控制檢定任務的執行;管理系統間的通信,中轉系統間的通信信息;監測設備與裝置工況及檢定任務執行情況,進行故障調度等。
自動化倉儲系統:電能表立體庫管理系統,與系統的主要交互是接收和執行檢定出庫、入庫任務。
搬運調度控制子系統:調度、控制AGV完成電能表的搬運,主要功能包括集中管理、監控AGV及其運行;接收和管理搬運任務;調度、控制AGV執行搬運任務等。
掛下表調度控制子系統:調度、控制機器人完成電能表的掛表和下表,主要功能包括集中管理、監控機器人及其運行;接收和管理掛下表任務;調度、控制機器人執行掛表和下表任務等。
集中檢定子系統:調度、控制檢測裝置完成檢測,主要功能包括集中管理和監控檢測裝置及其運行;接收和管理檢測任務;調度、控制檢測裝置執行檢測任務;集中管理檢定結果等。
支線調度控制子系統:調度、控制檢測支線完成外觀檢查、分揀、封印等操作,監控裝置運行工況,向綜合調度控制子系統上傳檢測結果。
1.3 通信規約設計原則
由于相互關聯的系統較多,通信規約設計既要考慮簡化實現和維護,同時也要考慮到后期系統出現功能變化需要擴展或修改接口時,接口變化影響的范圍最小。本文所有設備或裝置調度控制子系統僅與綜合調度控制子系統通信,通過在綜合調度控制子系統配置信息的轉發通道實現各個系統的信息互通,簡化系統之間的通信,方便開發和管理。接口通信基于Web Service協議,基于XML格式組織內容,方便接口的后續調整。
2 檢定任務自動執行過程探討
2.1 設計思路
由于檢定生產作業需要根據江蘇省用表需求不斷作出調整,系統投運后應支持靈活的檢定任務安排。另外,考慮到節能、高效等系統建設要求,靈活的檢定任務調度策略應滿足下列調度需要。全自動檢定:在沒有人工參與的情況下,系統正常運行時應能調度多個類型不同規格計量設備的檢定任務同時執行。
優先級調度:支持緊急的檢定任務優先執行,隨機到達的不同優先級檢定任務能并行執行。
隨機調度:支持手工設定特定的檢定任務在特定的某些檢測裝置上執行檢測,且不影響其他檢定任務的調度執行。
故障調度:出現部分裝置或設備故障時,正常運行的裝置或設備的任務調度不受影響。
時間最優:特定任務量下,完成這些檢定任務所用時間最短。
檢測裝置利用率最優:檢測裝置的檢測時間與檢測裝置的總運行時間比值最大。
設備與裝置整體利用率最優:設備與裝置執行檢定任務所用的時間與總運行時間的比值最大。
自適應調度:系統能自動根據當前檢定任務量的大小,啟動、調度、控制合理數量設備或裝置,按調度人員設定的目標,完成檢定任務。
2.2 檢定任務自動化執行過程設計
通過各個系統協調、配合,能滿足上述主要調度設計要求的一種檢定任務自動化執行過程如下。
2.2.1 綜合調度控制子系統
(1)維護資源信息同步:與設備和裝置調度控制子系統交互,維護所有設備和裝置狀態數據同步。當監測到設備或裝置出現異常信息時,觸發故障調度。
(2)生成待檢表緩存位:掃描正常狀態的檢測裝置,如果存在能為該檢測裝置掛、下表的能正常運行的機器人,且根據轉接臺的使用規則有一個能為該檢測裝置存放待檢表的轉接臺,且經過該轉接臺的AGV導航環路可以正常使用,則該檢測裝置對應的這個轉接臺就是一個待檢表緩存位。
(3)生成待檢表緩存位優先級隊列:根據經過待檢表緩存位對應轉接臺的AGV環路長度和站臺到該轉接臺的距離生成待檢表緩存位優先級隊列。較短AGV環路上距離站臺較遠的轉接臺對應的待檢表緩存位有較高優先級。待檢表緩存位根據其對應檢測裝置可以檢測的電能表類型、規格劃分為不同隊列。
(4)任務接收與核查:接收到檢定任務后,判斷任務是否可以執行,向調度人員反饋可執行情況信息。
(5)任務優先級調度:檢定任務根據緊急程度分為3個優先級。通過查詢倉儲系統,找到了檢定任務對應的所有垛信息,將檢定任務分解為這些垛的檢定任務——垛任務。垛任務使用與檢定任務同樣的優先級。所有相同類型、規格的電能表垛任務排入一個優先級隊列。系統調度時候,高優先級的垛任務優先出隊列,對應電能表類型、規格的高優先級待檢表緩存位出隊列,根據該垛任務和待檢表緩存位信息生成各個系統的任務。
(6)各個系統任務的生成與下發:各個系統的任務包括檢定出庫任務、搬運任務、掛表任務、檢測任務、下表任務、入庫任務等。根據垛任務及要表請求信息,綜合調度控制子系統一次生成所有上述任務,并將其發給對應的具體執行系統。
(7)故障調度:建立故障調度列表,預置不同故障類型調度處理器。當有故障發生時,系統通知對應類型的處理器執行預置的故障調度處理方法。
2.2.2 搬運調度控制子系統
搬運任務分站臺到轉接臺、轉接臺到轉接臺、轉接臺到站臺等。搬運調度控制子系統監測所有搬運任務的搬運起點,當發現有下垛站臺或起點轉接臺不為空,則查找對應電能表垛的搬運任務。如果核對垛信息相符,則將該任務放入可執行搬運任務隊列,等待調度AGV執行。
2.2.3 掛下表調度控制子系統
掛下表調度控制子系統監測所有掛、下表任務對應的機器人、轉接臺。如果檢測裝置處于空閑狀態且關聯的轉接臺上有待檢表垛,系統查找該垛對應的掛表任務,核對垛信息無誤后,將該掛表任務加入到為該檢測裝置執行掛表機器人的可執行任務列表。下表同理操作。
系統為每個機器人維護一個可執行任務列表,存儲該機器人對應的具備執行條件的任務。機器人執行任務時按檢測裝置的排列順序從起始位置向固定方向移動執行所有可執行任務,直至最大位置,然后反向繼續順序執行。為了提高效率,每次執行完下表任務后,立即查找、執行該檢測裝置的掛表任務。
2.2.4 集中檢定子系統
集中檢定子系統監測掛表任務執行情況。當監測到有掛表任務執行結束,系統調度對應的檢測裝置立即執行檢測。
2.3 一種改進設計
上述設計中,調度時讓靠近站臺的檢測裝置優先獲得檢定任務,較多的AGV搬運任務在較短的AGV導航環路上執行,提高了AGV的搬運效率。但是,當需要啟動較多檢測裝置執行檢測時,由于AGV由近及遠順序向轉接臺搬運電能表垛,會導致較遠位置的檢測裝置分配到任務的時間較晚,從而可能導致任務執行時間延長。一種改進調度過程如下:
(1)將待檢表緩存位優先級隊列按從該位置取表的機器人進行拆分。
(2)系統根據機器人到站臺的平均距離維護一個有序的機器人列表。
(3)由近及遠循環為機器人分配優先出隊列的垛任務,每次循環每個機器人分配一個垛任務。
(4)每個機器人對應的高優先級待檢表緩存位優先分配垛任務。
(5)其他過程不變。
2.4 不同設計方法的討論與分析
當檢定任務量較小,不需要啟動全部檢測裝置就能完成任務時,由于使用改進后的調度方法會啟動更多設備和裝置,AGV需要將電能表垛運到更遠的轉接臺,從而造成一定的設備和裝置利用率下降。但當任務量很大時,改進后的調度方法提高了不同環節設備運行的并行度,節省任務的執行時間,優勢明顯。
3 結束語
本文針對超大規模的電能表全自動檢定系統的建設需求,介紹了一種系統軟、硬件設計方案,所介紹的內容已通過仿真驗證,為研究和建設超大規模智能電能表全自動檢定系統提供了一個新的可供借鑒的參考方案。
[1]張 燕,黃金娟.電能表智能化檢定流水線系統的研究與應用[J].電測與儀表,2009(12):74-77.
[2]高利明,陳卓婭,張裕曉,等.一種智能化全自動流水線電能表檢定系統[J].河南電力,2011(4):38-41.
[3]侯興哲,常 濤.AGV技術在電能計量中心的應用[J].電測與儀表,2007(11):29-35.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
