GPS接收機C/A碼跟蹤算法及環路控制策略
2013-07-05 07:25:58雷明東孫函子
華東交通大學學報 2013年1期
關鍵詞:控制策略
胡 輝,方 玲,雷明東,孫函子
(華東交通大學信息工程學院,江西南昌330013)
目前,對高動態GPS接收機的研究重點集中在基帶信號處理算法上。在高動態環境下,偽碼相位隨載體運動而發生較大的變化,通常設計中碼跟蹤環在沒有載波跟蹤環輔助的情況下很難可靠工作。因此需設計相應的偽碼跟蹤環路對動態引入的碼相位誤差進行精確的估計。
目前高動態偽碼跟蹤算法主要有開環算法和閉環算法兩類。開環跟蹤直接對輸入信號的碼相位進行估計,對載體動態變化適應能力強[1],但運算量大且環路復雜,難以適應實時處理的需要。閉環跟蹤算法主要對偽碼相位延遲進行估計,能獲得精確的偽碼延時測量值,且運算量較小。在高動態GPS基帶信號處理算法中,通常采用閉環跟蹤算法[2]。目前廣泛應用的鑒相算法是超前-滯后鑒相算法[3-4]。該算法的性能依賴于信號幅度和載波環的性能,且運算量很大,很難滿足系統對實時性的要求。針對上述問題,本文主要研究的是與高動態載波跟蹤算法[5]相匹配的偽碼跟蹤算法,該算法是基于載波輔助技術的歸一化非相干點積功率偽碼跟蹤環而進行研究的,此算法中還包括了預檢積分時間可變的偽碼跟蹤環路控制策略。
1 GPS接收機偽碼跟蹤技術研究
捕獲以后,輸入信號碼相位和本地信號碼相位誤差在1個碼片范圍內,然而,GPS接收機偽碼跟蹤的目的是調整本地碼相位使之與輸入信號碼相位精確對準,使碼相位殘差可以減小到百分之一個碼片以內。偽碼跟蹤通常采用DLL環來實現[3,5-9]。GPS接收機碼跟蹤環主要由碼環鑒相器,環路濾波器和碼NCO構成,其結構如圖1所示。相關器輸出一般有六路相關值,即同相的超前(IE)、滯后(IL)和即時(IP)支路,正交的超前(QE)、滯后(QL)和即時(QP)支路。為了便于實現,圖1中將超前和滯后支路合并。相關器輸出四路相關值,分別為同相和正交的超前-滯后支路(IE-L,QE-L)和即時支路(IP,QP),即時支路如式(1)、(2)所示:


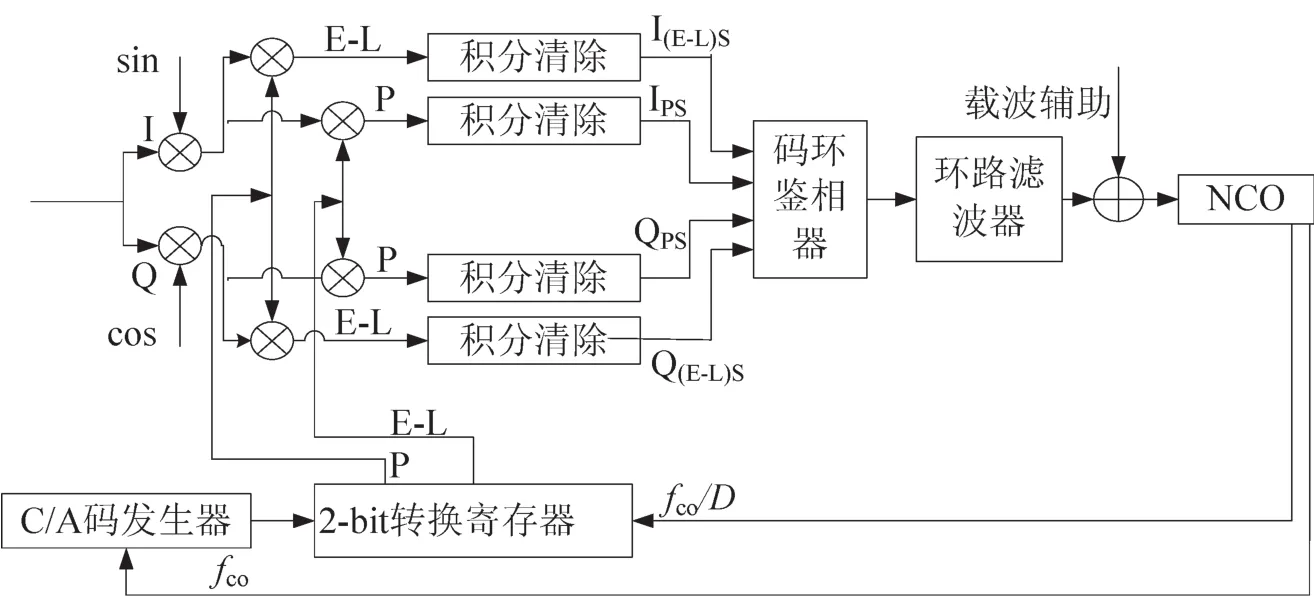
圖1 GPS接收機碼跟蹤環的結構框圖Fig.1 The structure diagram of GPS receiver's code tracking loop
采用的歸一化的非相干點積功率型鑒相器的鑒相函數如式(3)所示

由式(3)知,其中ecode為偽碼相位殘差,ecode只與偽碼相位偏差ε(k)有關。2δ=d,d即超前與滯后支路的相關間隔。歸一化消除了鑒相函數對幅度的敏感性,也消除了環路對數據位跳變的敏感性。將自相關函數公式帶入式(3)化簡可得式(4)
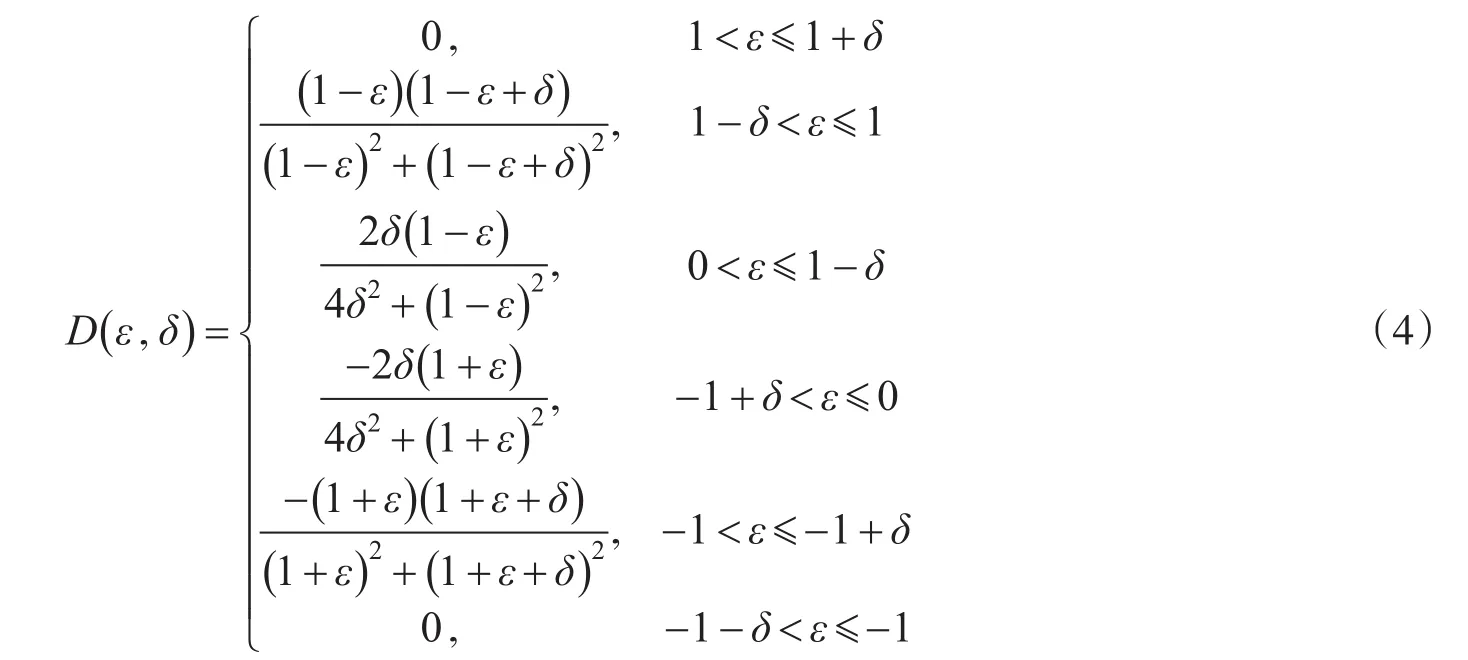
由鑒相特性函數式(4)可知,歸一化的非相干點積功率DLL鑒相器工作范圍與相關間隔d有關。其中,為鑒相范圍。在高動態環境下,要折衷選擇d。對于無輔助的碼跟蹤環路,為保證鑒相器的工作范圍,d通常取1 chip。當采用載波跟蹤環輔助碼跟蹤環時,d可以取得較小(d取0.5 chip),可有效減少環路中熱噪聲引入的誤差。
2 偽碼跟蹤環路控制策略
2.1 預檢積分時間可變的偽碼跟蹤環路控制策略
為兼顧碼跟蹤環的動態性能與噪聲性能,必須合理地選擇環路的預檢積分時間。由碼環熱噪聲公式可知,當d取0.5 chip時,化簡熱噪聲誤差公式如式(5)所示[9]。

式中:Bn為環路噪聲帶寬(Hz),為信號載噪比(dB-Hz);為雙邊帶前端帶寬(Hz),取值為為偽碼周期(s),T為預檢積分時間(s);fc為碼片速率。
環路預檢積分時間的增長受數據位跳變的制約,通常不超過20 ms。將預檢積分時間增加到20 ms,在理想的情況下,對于相關間隔為0.5 chips的偽碼跟蹤環路而言,可以額外獲得6 dB的熱噪聲顫動門限改善[9]如圖2所示。
優良的偽碼跟蹤環路控制策略應為:在初始跟蹤階段,碼跟蹤環的更新時間選擇1 ms,以便適應環路對動態應力的需求。進行位同步以后,估計出數據位跳變的位置,可將預檢積分時間增長為20 ms,以提高偽碼測量精度。
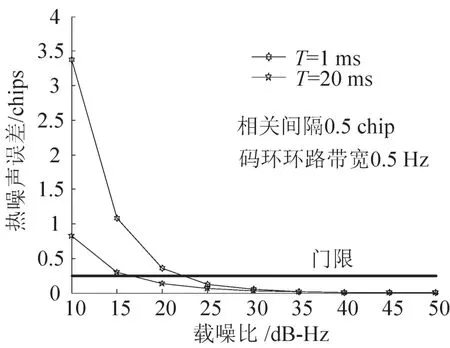
圖2 環路熱噪聲與載噪比和預檢積分時間的關系Fig.2 The relation table among the thermal noise,C/N0 and pre-detection integration time
2.2 載波輔助技術與環路帶寬的設計
碼環鑒相器輸出的碼相位誤差ecode通過環路噪聲帶寬為Bn的二階Jaffe-Rechtin濾波器,在載波跟蹤環有穩定輸出時,采用載波環輔助的碼跟蹤環的公式如式(6),(7)所示。

式中:e1_out為環路濾波器的輸出是濾波器參數,ω0為環路的固有頻率,fc是碼片速率,為載波環對碼環提供的輔助,該輔助降低了碼跟蹤環對動態的要求,而僅考慮其熱噪聲性能,Bn可選用更小的值,可有效減少環路中的噪聲。
碼跟蹤環設計中,跟蹤閾值的經驗取值為

式中:σDLL為測量誤差的均方根;σtDLL為熱噪聲引入誤差的均方根;Re為因接收機的動態性導致碼跟蹤環引入的動態誤差。
對于無載波環輔助的碼環的設計,首先考慮載體動態引入的誤差。

式中:m為環路階數;ω0為環路的固有頻率。m=2時,dRm/dtm為載體最大視線方向上的加速度動態,m=3時代表最大視線方向上的加加速度動態。
在采用載波環輔助碼環技術時,環路跟蹤門限主要由熱噪聲決定。對于非相干的DLL鑒別器,偽碼跟蹤環熱噪聲引入的誤差公式如式(5)所示。
在設計環路帶寬時還要求環路帶寬盡量接近最佳帶寬。所謂的最佳帶寬就是環路跟蹤誤差最小時對應的環路帶寬。滿足的Bn0就是環路的最佳帶寬,最佳帶寬的計算公式如式(10)所示。
3 算法仿真
3.1 算法流程
在分析偽碼跟蹤環時,可認為載波跟蹤環已有穩定的輸出,圖3為偽碼跟蹤策略的程序流程圖。

圖3 碼跟蹤策略的程序流程圖Fig.3 The program flow chart of code tracking strategy
本算法采用C/A碼偽距測距方案,因此,通過優化偽碼跟蹤環設計方案,提高偽碼跟蹤環的精度,從而可以提高測距精度,最終提高系統定位精度。本文中主要采用上文提出的預檢積分時間可變的環路控制策略來優化偽碼跟蹤環設計方案。以位同步是否成功作為環路切換的條件,將偽碼跟蹤分為兩個階段:預檢積分時間為1個碼周期的階段為環路的粗跟蹤階段,在有載波輔助的情況下,偽碼跟蹤環的粗跟蹤階段持續1 s。接著進行1 s的位同步,估計出數據位跳變的位置。
如果位同步成功,環路等待輸入數據中下一個比特跳變起始的位置,從新的比跳變的位置開始收集I、Q路相關值作為精跟蹤階段環路的輸入,這樣可以消除數據位跳變對碼環性能的影響,可以將預檢積分時間延長至20個碼周期。此時環路進入有載波輔助的精跟蹤階段,即偽碼跟蹤環的預檢積分時間為20個碼周期的跟蹤階段。如果1 s內位同步不成功,則繼續進行位同步,直到達到設定的最大時間tmax。其中tmax值的選擇可以根據接收機的使用環境決定。出于系統穩定性考慮,當達到或超過tmax,環路仍不能位同步,則宣布偽碼跟蹤環失鎖。根據失鎖前保存的相關信息,程序回到捕獲狀態重新進行信號的捕獲。本方案中采用環路控制策略,既滿足了動態指標,又在此基礎上兼顧了接收機對精度的需求。
3.2 實驗分析
GPS信號模擬器模擬載體的運動狀態如圖4所示,載體運動的時間為324 s,共分9段,其中包含靜止、勻速直線運動、加速度為±80 g的勻加速直線運動、加加速度為±10 g·s-1的變加速直線運動。在捕獲階段,一般要求本地偽碼的碼元誤差在±0.5 chip范圍內。在跟蹤階段,要將這個誤差進一步縮小并保持在誤差允許的范圍以內。為了滿足系統定位精度的要求,在跟蹤階段,本地偽碼的碼元誤差要求在±0.02 chip范圍內。
GPS接收機中常用Jaffe-Rechtin數字濾波器。文獻[9]給出了一、二、三階濾波器的特性。環路的穩態誤差與接收機到衛星間的視距R的n階(n即環路階數)導數成正比,與環路帶寬Bn成反比。根據本文給出的載體動態指標可知,為了跟蹤相位加加速度信號,必須采用三階或二階DLL環實現偽碼相位的跟蹤。
本文采用載波跟蹤環輔助偽碼跟蹤環技術,通過載波跟蹤環消除載體大部分動態,此時偽碼跟蹤環階數可降為一階。但考慮到高動態接收機穩定性和可靠性的需要,所以本文采用的是二階Jaffe-Rechtin濾波環 路 ,選 擇ξ=0.707,結 合 公 式(10)可 得Bn=0.53ω0。一階環路和三階環路的相應參數可參考文獻[9]。

圖4 載體運動狀態Fig.4 The motion state of carrier
依據上述分析,在無載波輔助的情況下,應考慮載體動態性對偽碼跟蹤環的影響,結合動態指標可知,偽碼跟蹤環的環路帶寬必須有Bn≥1.73 Hz。在無載波輔助的情況下,環路帶寬采用Bn=1.73 Hz,此時碼環鑒相器輸出如圖5所示。
結合載體的運動軌跡對圖5進行分析。當載體處于靜止狀態時,環路的鑒相誤差保持在±0.02 chip范圍內;載體處于高動態運動時,考慮載體動態性對偽碼的影響,此時環路的鑒相精度急劇變差,輸出的碼相位誤差峰峰值為0.2 chip。當載體再次處于靜止狀態時,碼環輸出的鑒相誤差重新回到±0.03 chip范圍內。對輸出的數據進行統計分析,其數學期望為4.029×10-4chip,標準差為0.031 2 chip。由以上分析可知,此時碼環性能較差,不能滿足系統對定位精度的要求。
圖6為僅采用環路控制策略時偽碼跟蹤環輸出的碼相位誤差。處于粗跟蹤階段時,偽碼跟蹤環能迅速收斂,此時鑒相誤差在±0.01 chip范圍內。精跟蹤階段時,當載體處于高速勻速直線運動或高動態運動狀態時,碼環輸出的鑒相誤差峰峰值為0.12 chip,不能滿足系統對定位精度的要求。對其精跟蹤階段輸出的數據進行統計分析,其數學期望為3.089×10-4chip,標準差為0.029 7 chip。相較于圖5,在載體處于高動態的情況下,采用環路控制策略時偽碼跟蹤環輸出的鑒相誤差減小了。采用載波環輔助碼環技術消除了偽碼跟蹤環所承載的大部分動態,此時可以忽略載體動態引入的誤差。當載波環已有穩定的輸出時,碼環跟蹤門限主要由熱噪聲決定。由式(5)可推知Bn≤0.5 Hz。結合d取0.5 chip時相應的最佳環路帶寬由式(10)得,Bn選擇0.5 Hz。
僅采用載波環輔助碼環技術時鑒相器的輸出如圖7所示。由圖7可知,不采用環路控制策略時,偽碼跟蹤環輸出的鑒相誤差峰峰值為0.11 chip,不能滿足系統對定位精度的要求。對其精跟蹤階段輸出的數據進行統計分析,其數學期望為-4.233 5×10-6chip,標準差為0.009 9 chip。比較圖6和圖7可知,采用載波環輔助碼環技術可以消除掉偽碼跟蹤環所承載的大部分動態,減小碼環輸出的鑒相誤差的標準差,使得碼環輸出的鑒相誤差比較平滑。
采用載波環輔助碼環技術和環路控制策略的碼相位誤差如圖8所示。在粗跟蹤階段和位同步階段,環路迅速收斂,偽碼跟蹤環輸出的相位誤差不超過0.055個碼片。進入精跟蹤階段后,偽碼跟蹤環的相位誤差峰峰值為0.02 chip,相位誤差的數學期望為-3.883 2×10-6chip,標準差為0.002 2 chip,能很好的滿足系統對定位精度的需求。由圖8可知,相較于圖5、圖6、圖7而言,偽碼跟蹤環的性能有了顯著的提高。實驗證明,采用環路控制策略能兼顧系統對動態性和精確性的要求。
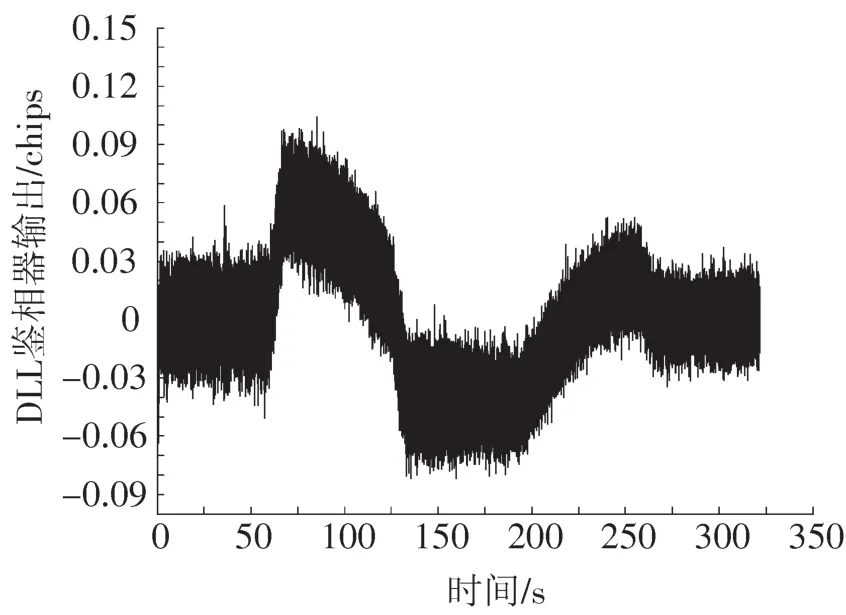
圖5 無載波環輔助無環路控制策略時碼環鑒相器的輸出Fig.5 The DLLdiscriminator output without any optimization
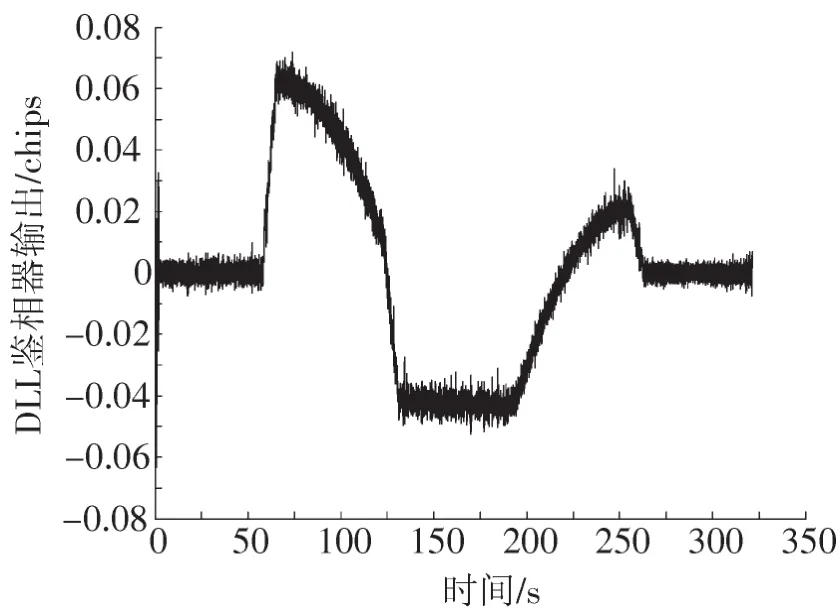
圖6 僅有環路控制策略時碼環鑒相器的輸出Fig.6 The DLLdiscriminator output with control strategies of the code tracking loop
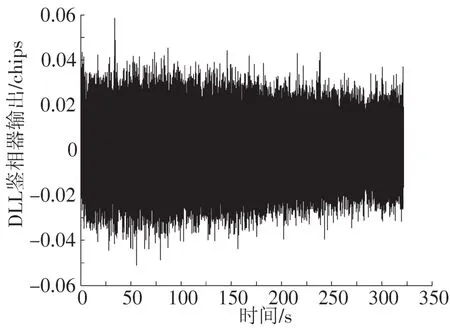
圖7 僅有載波環輔助碼環技術時碼環鑒相器的輸出Fig.7 DLLdiscriminator output with carrier aiding

圖8 有載波環輔助有碼環控制策略時碼環鑒相器的輸出Fig.8 The DLLdiscriminator output with carrier aiding and control strategies of the code tracking loop
由以上分析可知,當載體處于高動態運動狀態時,須采用載波環輔助碼環技術,以便消除載體動態性對偽碼跟蹤換的影響,減小環路帶寬,從而減小環路噪聲。另外,在精跟蹤階段,采用預檢積分時間可變的偽碼跟蹤環路控制策略,可以改善偽碼跟蹤環的性能,提高環路的鑒相精度,改善系統的定位精度。
4 結論
對高動態GPS接收機核心算法中的偽碼跟蹤算法的優化設計進行了分析,并對碼跟蹤環關鍵參數的設置進行了詳細的介紹,最后討論了載波環輔助碼環技術和環路控制策略對碼環性能的影響。基于MAT?LAB建立了仿真的系統模型。
通過實驗得出如下結論:在高動態環境下,增長預檢積分時間,減小相關間隔和環路帶寬都能提高環路的精度,但同時將減弱環路對動態應力的適應能力,因此在偽碼跟蹤環的設計中,首先要合理設計這些關鍵參數和合理的環路結構。實驗結果證明,本文中的設計方案能很好的滿足系統對實時性的要求。
[1]NESREEN I,ZIEDAN.GNSS receivers for weak signals[M].Norwood,MA:Artech House,2006:71-85.
[2]孫禮.GPS接收機系統的研究[D].北京:北京航空航天大學,1998:8-11.
[3]李小民.高動態環境GPS應用中的幾個關鍵問題研究[D].北京:北京航空航天大學,1999:15-23.
[4]胡輝,孫函子,紀兆云.高動態GPS載波跟蹤算法和環路控制策略研究[J].宇航學報,2011,32(8):1805-1812.
[5]胡輝.高動態數字化GPS接收機的研制[R].上海:上海航天局博士后工作站,2002:51-84.
[6]NABIL J,ALEXANDRE V,MARC J,et al.Implementation of an optimized code loop for indoor positioning[C].Proceedings of the 20th International Technical Meeting of the Satellite Division of The Institute of Navigation(ION GNSS 2007),Fort Worth,TX,2007:1396-1404.
[7]ALAQEELI A S,JVAN GRAAS F.Real-time acquisition and tracking for GPS receivers[J].Circuits and Systems,2003,ISCAS’03,2003(4):500-503.
[8]DAVID M L,JAMES BYT.High Performance Tracking algorithms for software GPS receiver[C].Proceedings of the 18th International Technical Meeting of the Satellite Division of The Institute of Navigation(ION GNSS 2005),Long Beach,CA,2005:1638-1644.
[9]KAPLAN E D,HEGARTY C.Understanding GPS:principles and applications[M].Norwood,MA:Artech House,2005:161-200.
[10]胡輝,葉鑫華.基于GP2010的GPS接收機前端模塊實現[J].華東交通大學學報,2008,25(4):75-79.
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36