衛星導航系統防欺騙技術的回顧與展望
2013-07-25 07:49:36李廣俠蔡錠波程佳亮
導航定位學報 2013年3期
周 軒,李廣俠,蔡錠波,程佳亮
(1.解放軍理工大學 通信工程學院研2隊,南京 210007;2.解放軍理工大學 通信工程學院天基信息中心,南京 210007;3.75220部隊,廣東 潮州 521000;4.73681部隊523分隊,南京 210000)
1 引言
全球衛星導航系統 (global navigation satellite system,GNSS)廣泛應用于人們的日常生活,在海陸空交通,時間同步網絡,生命安全,位置服務等國民經濟生活方面可謂無處不在,成為公認的現代社會基礎設施之一[1]。
根據互聯網的經驗,廣泛應用的技術容易成為敵對方和犯罪份子攻擊的目標。由于GNSS信號到達地面功率很低 (-160dBW),且民用信號結構是公開的,從而容易受到干擾和欺騙[2]。衛星導航系統欺騙技術是敵方或犯罪分子通過發射與真實信號相同或者相似的虛假信號,引導受害接收機對其進行捕獲跟蹤,使接收機得到錯誤的定時定位結果。欺騙比干擾危害更大,因為受害接收機不能檢測到自己被欺騙,攻擊方式更為隱蔽[3]。簡單的欺騙攻擊可以通過全球定位系統(global positioning system,GPS)信號模擬發生器進行,復雜的欺騙攻擊因軟件無線電技術的發展變得容易實現。欺騙帶來的后果可能是災難性的,如引導敵方飛機按己方意愿飛行,或導致遠洋運輸輪船在海上 “迷路”,亦或者使依賴導航授時的網絡時統(電力系統、金融系統)陷入混亂等等。
2001年,美國交通部提交的報告對GPS在交通系統中的應用進行了評估,指出其存在的脆弱性,建議在民用領域采取防欺騙措施[4],由此拉開了防欺騙技術研究的序幕。近年來,防欺騙研究得到越來越多的關注,國外相關領域專家提出了許多有益的解決思路。
本文第二部分對欺騙攻擊方式做一簡單評述;第三部分分類介紹了當前的防欺騙技術;第四部分初步建立防欺騙技術體系的構想并對比了各類防欺騙技術的優劣;最后在第五部分進行總結。
2 欺騙干擾簡介
欺騙干擾是一種針對擴頻系統的相關干擾。根據欺騙干擾信號的產生方式,可分為產生式和轉發式,而根據欺騙難度,可分為簡單、中等和復雜[3-7]。
2.1 欺騙干擾信號產生方式
產生式欺騙:將導航信號模擬器與功放、天線連接,即可產生用于欺騙目標接收機的導航信號。這種欺騙信號難以與真實導航信號同步,故產生的信號在接收端類似于噪聲,可使目標接收機鎖定欺騙信號或失鎖[8]。
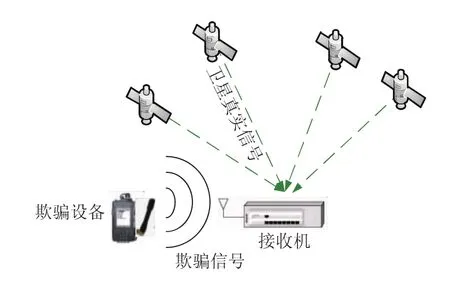
圖1 產生式欺騙
轉發式欺騙:先用導航信號接收機接收導航衛星下行信號,然后直接將接收信號轉發或對接收導航電文信息篡改后轉發,使目標接收機解得錯誤的定位定時結果[8]。前者稱透明轉發,后者稱處理轉發。這種方式由于與衛星導航下行信號一致性很高,故不易被受害接收機發現。
2.2 欺騙技術分級
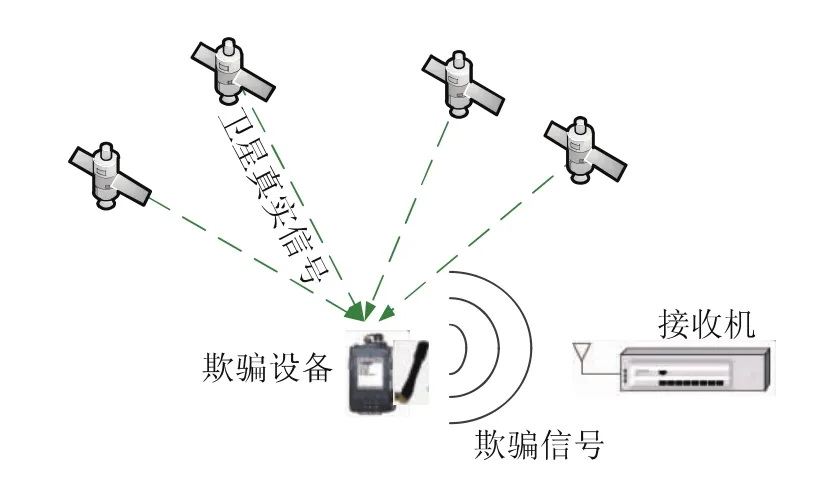
圖2 轉發式欺騙
簡單欺騙技術采用產生式,該信號與真實衛星播發的信號一致性較差,如果目標接收機采用一定的防欺騙措施,可使這種方法失效。此外,導航信號模擬器費用較貴,對欺騙方要求較高。
中等欺騙技術采用 “接收-欺騙”模式,即轉發式,這種情況產生的欺騙信號與當前衛星播發的導航信號一致性較好,尤其是在電文內容、時間頻率的同步上,可進行單目標攻擊,不易被受害接收機發現。
復雜欺騙技術首先測量目標用戶的位置和時間,然后依據測得的數據產生信號幅度、時間、信息比特、碼相位、載波相位相似的偽裝信號進行攻擊,多個欺騙干擾源同時在不同地點對單一目標或區域內多個目標進行欺騙干擾。這些欺騙干擾源在時間上同步,目標接收機更難發現,受害接收機甚至會排除真實信號,導致成功的欺騙[5]。
3 防欺騙技術
2012年6月底美國德州大學的T.E.Humphreys教授用無人機實驗驗證了欺騙攻擊的現實可能性,引起同領域專家極大關注。針對衛星導航在防欺騙方面的脆弱性,國外研究人員提出了許多防欺騙技術,根據關注點的不同,可將這些技術分為三個方面:信號體制,終端技術及外部輔助。
3.1 信號體制
采用鑒權的方式在信號格式中插入某些播發前無法讓攻擊方預知的秘密信息,用戶通過對這些秘密信息的真實性進行校驗,來判斷所跟蹤的信號是否是真實信號[9]。
3.1.1 擴頻碼加密
由于軍用信號采用了加密措施,對其進行欺騙成本較高。民用導航信號尚未采用此類措施,可借鑒軍用信號加密方式,在民用信號的導頻序列中每隔一段時間加入一段加密序列。
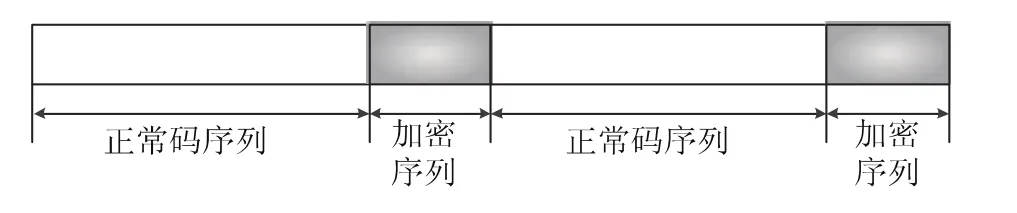
圖3 周期碼中插入加密序列
3.1.2 電文加密
如果欺騙方將導航信號接收下來并剝離導航數據,在上面調制偽造的導航數據向受害接收機播發,仍可能進行成功的欺騙。針對這種方式,可采用電文加密,即在目前的保留頁或某些子幀上進行部分信息加密或鑒權,接收機利用密鑰對電文真實性認證。
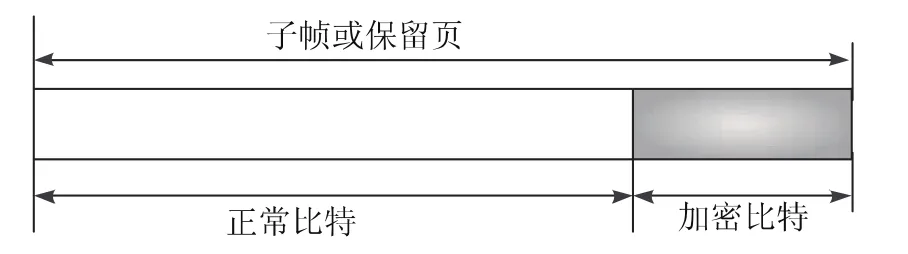
圖4 電文加密
3.2 終端技術
單模衛星導航接收終端防欺騙可從三個層面入手:信號處理層、信息校驗層、信息解算層。雙模(無線電導航 (radio navigation,RN)/無線電定位(radio determination,RD)組合)衛星導航接收終端還可利用衛星無線電導航服務 (radio navigation satellite service,RNSS)和衛星無線電定位服務(radio determination satellite system,RDSS)定位原理不同進行校驗,判斷是否受到欺騙干擾。
3.2.1 信號處理層
信號功率檢測:包括對信噪比,絕對功率,接收機移動功率變化及多頻功率比的監測[5]。在凈空的情況下,衛星運動和電離層變化引起的接收的信號功率變化是平滑的,若有欺騙信號進來,接收機的信噪比會有突然的跳變 (信噪比監測)[10];欺騙設備與目標接收機之間的路徑損失是易變的,欺騙設備很難控制欺騙信號不超過真實信號的正常功率 (絕對功率監測);由于欺騙設備與目標設備之間距離較近,兩者相對運動引起的信號功率變化很快,距離越近變化越劇烈 (接收機移動功率變化監測)[11];大多數用戶機能夠接受多個頻點,如果欺騙方僅能針對單頻點進行欺騙,利用接收機監測雙頻功率狀況,依據多頻功率的差別可判斷是否有欺騙信號 (多頻功率比監測)。
殘留信號檢測:在不能精確知道受害接收機相對欺騙方天線的天線相位中心情況下,不可能完全壓制真實信號。可以利用殘留的真實信號進行欺騙檢測和欺騙消除[3]。該技術類似直擴碼分多址系統中用于改善遠近效應的方法,但對接收方硬件設備尤其是數據處理能力有要求。
來波方向檢測:如果一臺欺騙發射機同時發射幾顆不同衛星的欺騙信號,那么各欺騙信號存在的空間相關性,可以采用多天線測向 (類似干涉儀)的方法進行檢測[5,12-13]。由于天線之間基線已知,利用相同衛星到達不同天線載波相位差可求得接收信號的波達方向。如果不同衛星信號來自同一方向,可以判定己方受到欺騙干擾。
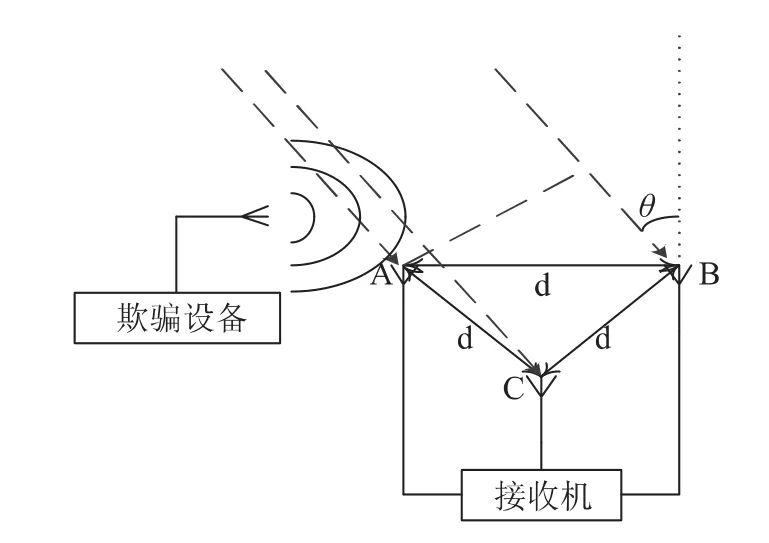
圖5 三臺天線判斷來波方向
兩天線之間的相位差Δφ為

式中,λ為導航信號波長,d為基線長度,θ為衛星信號入射方位角。可以看到,利用相同衛星同時刻到達兩天線的載波相位差Δφ,就可以求出該衛星的入射方向θ。如果是判別各衛星入射的方位角是否相同,只需兩個天線即可。三個天線可用于測量衛星信號到達天線的俯仰角,如圖所示,利用星歷、歷書解算出的衛星俯仰角進行校驗。此方法還可用于消除欺騙信號,達到改善接收結果的目的。多天線技術是目前最為有效的防欺騙方法,具有不容忽視的應用前景。
波達時刻檢測:對轉發式欺騙,其欺騙信號到達受害接收機時刻與真實信號相比存在不可避免的時延。如果轉發信號與直達信號在目標接收機天線相位中心處的時延大于一個碼片時,則認為接收機可能受到欺騙干擾[14-15]。
碼和載波速率一致性檢測:一般情況下,衛星與接收機之間相對運動是穩定的,因此接收機的碼片滑動和多普勒頻移變化是一致的。若欺騙設備在碼和載波頻率上控制不好,則可檢測到欺騙帶來的異常[5]。
自 動 增 益 控 制 (automatic gain control,AGC)增益檢測:由于衛星導航信號到達地面的功率很低,需要接收機采用增強信號的方法,AGC的主要作用就是調整有源天線的增益大小。而存在欺騙干擾信號 (轉發式欺騙轉發放大的真實GNSS信號,同時放大了噪聲)時,AGC增益會快速降低,以此可作為檢測欺騙信號的判據[14]。
3.2.2 信息校驗層
星歷、歷書校驗:現有導航接收機能夠存貯導航衛星星歷等信息,此信息在一段時間內(12.5min)保持有效。利用存儲星歷或歷書與當前接收的星歷或歷書進行校驗[3-5]。如果發現有明顯不一致,則說明接收機有可能受到欺騙干擾。
衛星時鐘校驗:衛星導航接收機受到的衛星導航電文中包含時鐘信息,不同衛星的時鐘信息應該是保持同步的,在非同步攻擊中的電文信息出現時鐘信息前后會有突變,以此可作為遭受欺騙攻擊的依據[14]。
加密或鑒權認證:對加密或鑒權信息進行認證,需對未來民用信號結構進行修改,考慮到社會經濟效益問題,此技術短期內不適用。
3.2.3 信息解算層
接收機自主完好性檢測:欺騙信號可看做是故障衛星信號,可利用接收機自主完好性監測 (receiver autonomous integrity monitoring,RAIM)算法剔除故障星,達到消除欺騙的目的。RAIM算法在衛星導航完好性領域研究比較活躍,已有成熟的理論和技術,可作為一種實現方法做進一步研究[16]。
本地時鐘變化率:利用靜態情況下解算鐘差及變化率或單星時差基本保持穩定的特點,當解算出的本地時鐘特性發生突變時即可懷疑受到了欺騙干擾。
多普勒頻移檢測:多普勒頻移是由于衛星與接收機之間存在相對運動而產生的。多普勒頻移計算公式為

式中,fr為接收機接收頻率,ft為衛星發送頻率,vr為星地相對速度矢量,a為衛星在接收機處的單位觀測矢量,c為光速。接收機可以根據歷書或先驗頻移信息估算出未來的頻移大小,衛星運動產生的頻移范圍在±5kHz左右,變化率在1Hz/s左右,這些變化是近似線性的。因此對于運動狀態已經確定的用戶,接收機可以設定未來頻移變化的上下限,從而一旦頻移出現超出門限的突變,就可能被欺騙了[5]。
3.2.4 RN/RD雙模組合
由于欺騙方大多會采用針對GPS的欺騙干擾,而我國北斗衛星導航試驗系統采用RDSS體制,與GPS無源定位方式不同,RDSS是有源定位方式,頻段和原理都有不同,因此可采用RN/RD雙模組合終端來進行欺騙檢測。
3.3 外部輔助
將衛星導航接收機的解算結果與其他導航手段測量結果對比,如定位結果偏差超出可接受范圍,則認為存在被欺騙的可能[17]。
衛星導航系統互操作:目前世界上4大衛星導航系統并存,利用互操作技術使接收機接收所有衛星導航系統信號,對各衛星導航系統定位結果進行組合判別 (除非所有導航信號同時受到欺騙)。
與慣導單元組合:獨立式慣導設備不依賴外界信息,可獨立地提供多種較高精度的導航參數(位置、速度、姿態),將慣導和衛星導航組合,可以有效地判別導航結果的真實性。
與其他無線電導航系統組合:在衛星導航出現之前,地面無線電導航就已廣泛應用 (羅蘭系統、塔康系統等),可比較衛星導航接收機解算結果與地面無線電導航系統測量結果,以確認是否受到欺騙干擾。
與其他傳感器組合:氣壓高度計、磁羅經等傳感器可提供一些輔助信息給接收機參考。
3.4 技術對比
根據對現有技術的分析,可將防欺騙技術做一個簡單評析,見表1。
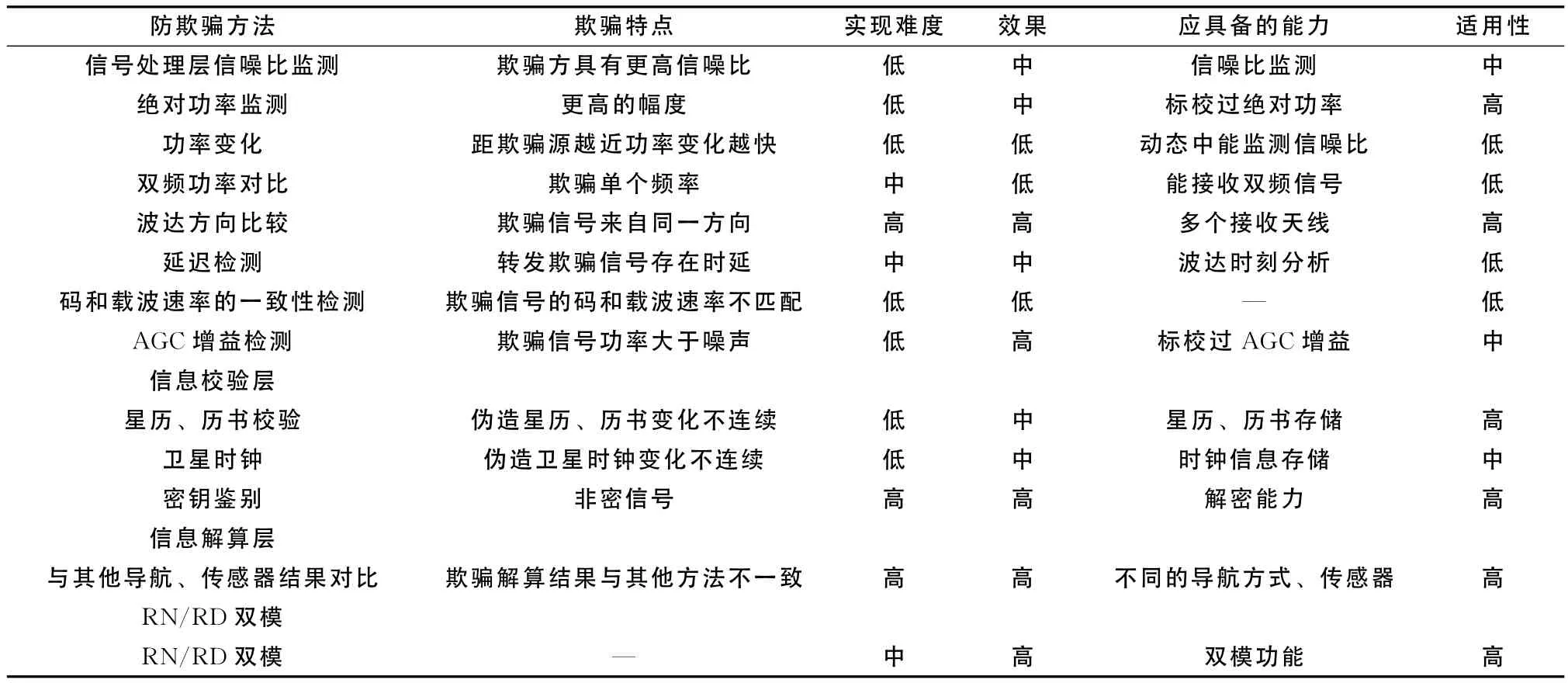
表1 欺騙檢測技術對比

表2 欺騙消除技術對比
分析上述兩個表,由于每種防欺騙技術都有其一定的應用場景,在建立防欺騙體系的過程中,其付出的代價和實際效果是需要平衡的。防欺騙技術存在成功概率問題,為得到最佳的防欺騙效果,必須綜合考慮。
4 防欺騙技術體系
前節討論了目前防欺騙研究領域的主要技術手段,通過分析可看出各種技術的側重點及適用場景各有不同。為應對欺騙干擾的威脅,必須將建立國家防欺騙體系工作提上日程,使衛星導航系統能夠安全、可靠地提供應用服務。通過對現存防欺騙手段的對比分析 (表1、表2),防欺騙體系可以分為三個環節:欺騙檢測、欺騙消除和反向定位。
欺騙檢測目的在于發現欺騙干擾,并不能對欺騙干擾采取對策[4];欺騙消除則是在已知欺騙干擾存在的情況下,減輕或消除欺騙干擾影響,恢復受害接收機正常導航定位功能[5];反向定位是在發現欺騙存在時,采用陣列天線等技術定位干擾源位置,對干擾源進行警告甚至摧毀之,達到物理消除欺騙干擾的目的。目前尚無專門研究反向定位的防欺騙技術,由于在防欺騙領域具備實戰能力,應在未來研究中給予關注。防欺騙體系的三個環節具有時間上的繼起性,本文所提到的防欺騙技術可用于防欺騙體系各個環節,如圖6所示。
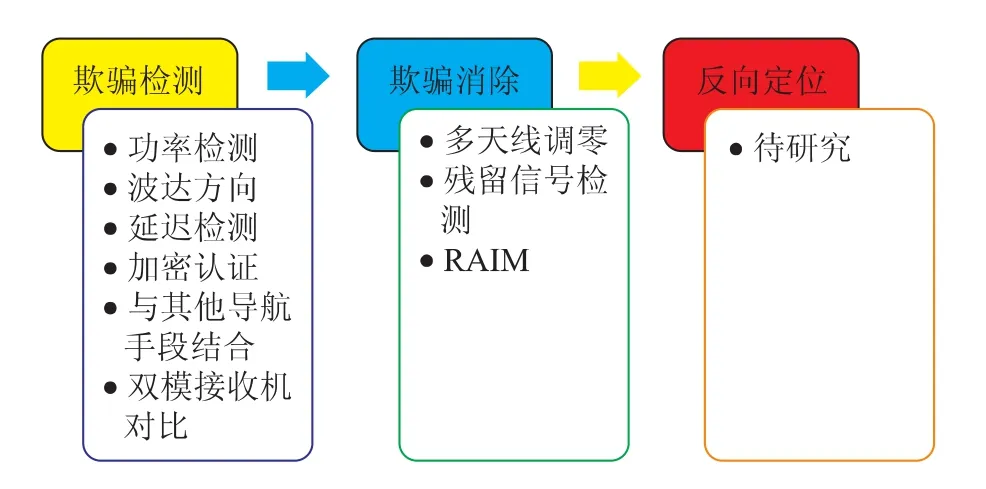
圖6 防欺騙體系各環節示意圖
圖6為建立防欺騙技術體系提供了有益的思路,其中包含的防欺騙技術具有一定的實用性,在未來工作中需進一步研究。
5 結論
本文簡要分析了欺騙干擾對衛星導航系統的危害,討論了目前防欺騙研究領域已有的防欺騙技術,從建立防欺騙體系的角度對現有防欺騙技術進行了分析對比。單一防欺騙技術難以達到最佳結果,根據不同場景綜合運用防欺騙技術,建立國家防欺騙技術體系,是將來研究的重要方向。
[1]KAPLAN E D,HEGARTY C J.Understanding GPS Principles and Applications[M].2nd ed.Boston:Artech House,2006.
[2]李躍,邱致和.導航與定位-信息化戰爭中的北斗星[M].2版.北京:國防工業出版社,2008.
[3]HUMPHREYS T E,LEDVINA B M,PSIAKI M L,et al.Assessing the Spoofing Threat:Development of a Portable GPS Civilian Spoofer[EB/OL].[2013-04-28].http://108.167.174.48/~ledvina/wp-content/uploads/2012/07/assessing_spoof_threat.pdf.
[4]CARROLL J V.Vulnerability Assessment of the U.S.Transportation Infrastructure that Relies on the Global Positioning System[J].The Journal of Navigation,2003,56(2):185-193.
[5]JAFARNIA-JAHROMI A,BROUMANDAN A,NIELSEN J,etal.GPS Vulnerability to Spoofing Threats and a Review of Antispoofing Techniques[J/OL].[2013-04-28].http://www.hindawi.com/journals/ijno/2012/127072/.
[6]LEDVINA B M,BENCZE W J,GALUSHA B,etal.An In-line Anti-spoofing Device for Legacy Civil GPS Receivers[EB/OL].[2013-04-28].http://108.167.174.48/~ledvina/wp-content/uploads/2012/07/inline_antispoofing.pdf.
[7]WEN Heng-qing,HUANG P Y R,DYER J,etal.Countermeasures for GPS Signal Spoofing[C]//Proceedings of the 18th International Technical Meeting of the Satellite Division of The Institute of Navigation(ION GNSS 2005),Long Beach,CA,September,2005:1285-1290.
[8]黃龍,呂志成,王飛雪.針對衛星導航接收機的欺騙干擾研究[J].宇航學報,2012,33(7):885-890.
[9]SCOTT L.Anti-spoofing and Authenticated Signal Ar-chitectures for Civil Navigation Systems[C]//Proceedings of the 16th International Technical Meeting of the Satellite Division of the Institute of Navigation(ION GPS/GNSS 2003),Portland,OR,September 2003:1543-1552.
[10]JAFARNIA-JAHROMI A, BROUMANDAN A,NIELSEN J,etal.GPS Spoofer Countermeasure Effectiveness Based on Signal Strength,Noise Power and C/N0Observables[J].International Journal of Satellite Communications and Networking,2012,30 (4):181-191.
[11]NIELSEN J,BROUMANDAN A,LACHAPELLE G.Spoofing Detection and Mitigation with a Moving Handheld Receiver[J].GPS World,2010,21(9):27-33.
[12]MONTGOMERY P Y,HUMPHREYS T E,LEDVINA B M.Receiver-autonomous Spoofing Detection:Experimental Results of a Multi-antenna Receiver Defense Against a Portable Civil GPS Spoofer[C/OL].[2013-04-28].http://rnl.ae.utexas.edu/images/stories/files/papers/multi_antenna_defense_montgomery.pdf.
[13]MCDOWELL C E.GPS Spoofer and Repeater Miigation System Using Digital Spatial Nulling[P/OL].[2013-04-28].http://patent.ipexl.com/US/7250903.html.
[14]SHEPARD D,HUMPHRYS T.Characterization of Receiver Response to a Spoofing Attack[EB/OL].[2013-04-28].http://radionavlab.ae.utexas.edu/publications/characterization-of-receiver-response-to-aspoofing-attack.
[15]HEIN G W,KNEISSL F,AVILA-RODRIGUEZ J A,et al.Authenticating GNSS:Proofs Against Spoofs Part 2[EB/OL].[2013-04-28].http://www.insidegnss.com/auto/SepOct07-wkngpapers-proof-spoof.pdf.
[16]CHENG X J,CAO K J,XU J N,etal.Analysis on Forgery Patterns for GPS Civil Spoofing Signals[C]//Proceedings of the 2009Fourth International Conference on Computer Sciences and Convergence Information Technology(ICCIT’09),Seoul,Korea,November 2009:353-356.
[17]WHITE N A,MAYBECK P S,DEVILBISS S L.Detection of Interference/Jamming and Spoofing in a DGPS-aided Inertial System[J].IEEE Transactions on Aerospace and Electronic Systems,1998,34(4):1208-1217.
[18]CAVALERI A,MOTELLA B,PINI M,etal.Detection of Spoofed GPS Signals at Code and Carrier Tracking Level[C]//Proceedings of NAVITEC‘2010& European Workshop on GNSS Signals and Signal Processing,Noordwijk,The Netherlands,December,2010:1-6.
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
中華手工(2017年2期)2017-06-06 23:00:31
海峽科技與產業(2016年3期)2016-05-17 04:32:12
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中外會展(2014年4期)2014-11-27 07:46:46
