環狀可展機構運動學分析方法及應用研究
2013-07-25 03:37:16韓瑩瑩鄭鈺祺
中國機械工程 2013年9期
韓瑩瑩 袁 茹 鄭鈺祺
西北工業大學,西安,710072
0 引言
可展機構具有展開后面積大、收攏時占用空間小且便于收放和運輸等特點,在航天、航空、建筑等領域的應用廣泛。為了滿足收放空間和形狀要求,這種機構的結構設計和運動分析研究受到國內外學者的普遍重視,特別是對空間過約束單自由度可展機構的研究已成為目前機構學領域的研究熱點之一。
Gan等[1-2]分析并制作了能緊密收攏的多桿環狀可展機構模型,采用預估校正的方法求得機構在展開過程中夾角的關系,并用奇異值分解法分析了機構的奇異性。Chen等[3]研究了Bennett機構的幾何特性并設計制作了能夠緊密收攏的Bennett機構的另一種形式的模型。在此基礎上Chen等[4-5]又進一步研究了特殊線面對稱 Bricard機構的分叉點和三面對稱Bricard機構的運動特性。楊毅等[6-7]設計了一種新型六面體可展機構和一種新型四棱錐單元機構。羅堯治等[8]結合四面體旋轉環機構和三向對稱六連桿機構的基本原理,設計了一種向外翻轉開啟式可展機構,并詳細闡述了該可展機構的形式和設計原理。
現有研究主要集中在可展機構的幾何構型方面,而對可展機構單元本身的設計及其展開運動的研究不多,目前對于可展機構的運動分析,比較常用的一種方法是采用商業軟件進行仿真,對于可展桁架組合成的可展機構,一般采用幾何約束建立約束方程分析其運動;對于復雜的可展機構,采用影響系數法分析其運動。本文采用D-H傳遞矩陣法建立可展機構的運動約束方程,并設計了四桿全鉸鏈可展機構,該機構是一類滿足收攏緊密且能展開成平面模型的單自由度過約束環狀可展機構。
1 線性方程組的 Moore_Penrose廣義逆解法
設A∈Cm×n,對矩陣A進行奇異值分解可得

其中,U是m×m階的正交矩陣,S是m×n階的廣義對角陣,V是n×n階的正交矩陣。由式(1)求得矩陣A的Moore-Penrose廣義逆為A+=VS+UT,式中

其中,σ1≥σ2≥…≥σr>0,且矩陣A的秩為r,求解線性方程組Ax=b,當系數矩陣A是非奇異方陣時方程組的唯一解為x=A-1b,而當系數矩陣A是奇異陣或長方陣時需采用廣義逆來求解該方程組。① 當rank(A)=rank(A∶b)時,方程組相容,方程的極小范數解與通解分別為

式中,z為任意n維向量;I為n階單位矩陣。
②當rank(A)≠rank(A∶b)時,方程組不相容,方程組的最小二乘解及最小二乘通解分別為

2 多桿閉環連桿機構的運動方程
由n個連桿組成的閉環機構能夠運動的充分必要條件是所有連桿的變換矩陣依次相乘的結果為單位矩陣[8],即

其中,變換矩陣Ti-1,i是桿i-1上的坐標系Oi-1Xi-1Yi-1Zi-1與桿i上的坐標系OiXiYiZi間的變換矩陣。如圖1所示,每個鉸鏈上固定一坐標系,對于鉸鏈i,Zi軸沿該鉸鏈的軸線向上,鉸鏈i的軸線與鉸鏈i+1的軸線的公垂線即為Xi軸,方向由Zi指向Zi+1,Xi軸與鉸鏈i軸線的交點為坐標系OiXiYiZi的原點Oi,Yi軸由右手螺旋法則確定,桿長ai-1,i是由被連接的兩鉸鏈軸線Zi-1和Zi的公垂線決定的;兩軸間的扭角αi-1,i是由軸線Zi-1繞公垂線Xi-1轉至軸線Zi轉過的角度,依據右手螺旋法則確定其方向,兩連桿間的夾角θi為Xi-1軸繞Zi軸轉到Xi軸的角度,其方向依據右手螺旋法則確定,Xi-1軸沿Zi軸到Xi軸的距離為相鄰兩桿間的偏置。
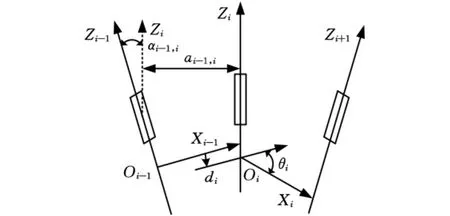
圖1 由鉸鏈連接的連桿之間的參數
坐標系Oi-1Xi-1Yi-1Zi-1與 坐 標 系OiXiYiZi之間的變換矩陣為
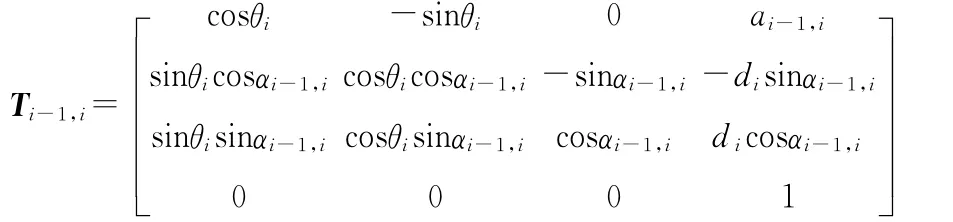
其中變換矩陣可分解成兩矩陣之積,即
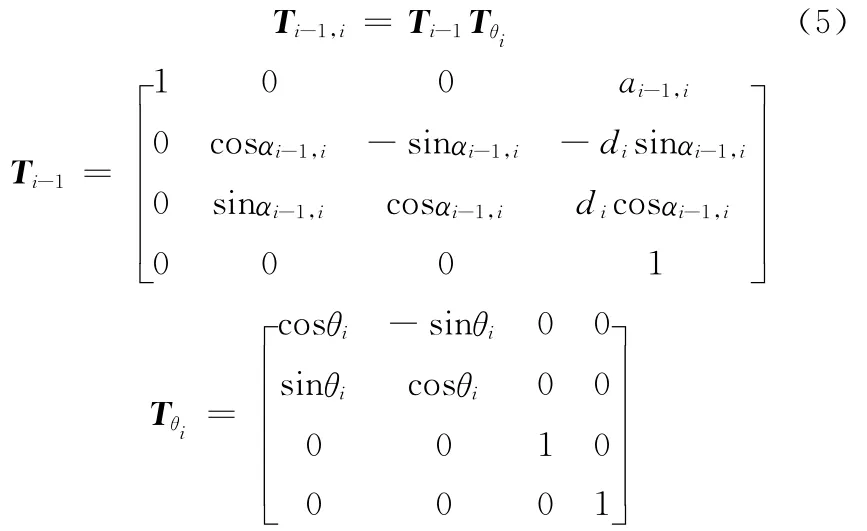
由式(5)知變換矩陣T只依賴于4個參數α、a、θ、d,所以桿系需要用這樣的4個參數來描述,其中桿長和扭角兩個參數描述連桿本身,他們是固定不變的;而偏置和轉角兩個參數描述相鄰兩桿的連接關系。對于轉動副連接的桿系,轉角是變量,而偏置是固定不變的,故在桿運動過程中Ti-1是固定不變的,而Tθi是變化的。
當運動過程中夾角有微小變化時,則有
假設轉角增量為Δθia,將式(6)代入式(4)并合并同類項可得
式中,I為4階單位矩陣。
令
可推導得

其中,0為4階零矩陣,Qi的形式為
將式(8)代入式(7)可得如下方程組:
其中,Δθia= [Δθ1aΔθ2a… Δθna],雅可比矩陣K的表達式為
機構自由度大于或等于1時機構才能運動,故矩陣K為欠秩矩陣,對矩陣K進行奇異值分解,同式(1),有

顯然該方程組是相容的,結合式(2)并將正交矩陣VK的最后一列代入其中,可求得線性方程組KΔθia=0的解。估計值Δθb與Δθia成一定比例,將θib=θi+Δθib代入式(4)可得

若有θn=θi+Δθib+Δθic滿足下式:

則稱Δθic為校正值,展開式(10),并將式(11)代入可得
整理得

且Qic和E的形式為
將式(12)寫成方程組的形式:

其中,Kb為12×n的矩陣,Δθic為n×1的向量,Eb為12×1的向量,由式(2)與式(3)可知,不管方程組(13)相容與否,其最小二乘通解或相容時的通解為Δθic=b+(I-b)z,這里I為n階單位矩陣,z為任意的n維向量,z取為零向量,求得的Δθic即為校正值,從而可得θi+1=θi+Δθib+Δθic=θi+Δθi,將已知的夾角作為初始角度,這樣不斷迭代循環,直到夾角達到需求的角度從而可求出各桿之間夾角的關系。
3 算例
以四桿環狀可展機構為例進行運動分析。圖2、圖3分別為四桿環狀可展機構的展開圖與收攏圖,將坐標系原點O取在點A,Y軸固定在邊AB上,X軸與Y軸垂直并固定在桿面ABEF上,由右手螺旋法則確定Z軸的方向。該機構是由截面為三角形的完全相同的桿經鉸鏈內外交互鏈接而組成的,則同一個軸線上兩條公垂線的垂點重合。圖2中機構展開時軸線Z1與Z2的公垂線為U1U2,軸線Z2與Z3的公垂線為U2U3,由于4個構件完全相同,可知夾角θ3與θ1的收攏角與展開角相同,夾角θ4與θ2的收攏角與展開角相同,且圖中各點在坐標系OXYZ中的坐標可由機構的幾何條件確定,則各個可展角θid與收攏角θif可由機構的幾何尺寸計算出。
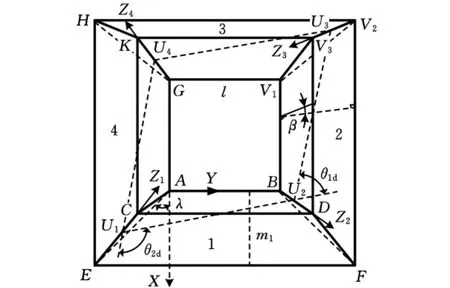
圖2 機構展開圖
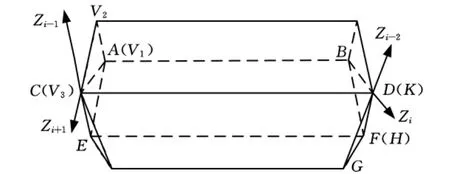
圖3 機構收攏圖
圖2所示構件的截面夾角β變化時,機構的收攏角與展開角變化情況如圖4所示,機構由收攏狀態到完全展開過程中,夾角θ1由θ1f變為θ1d,夾角θ2由θ2f變為θ2d。
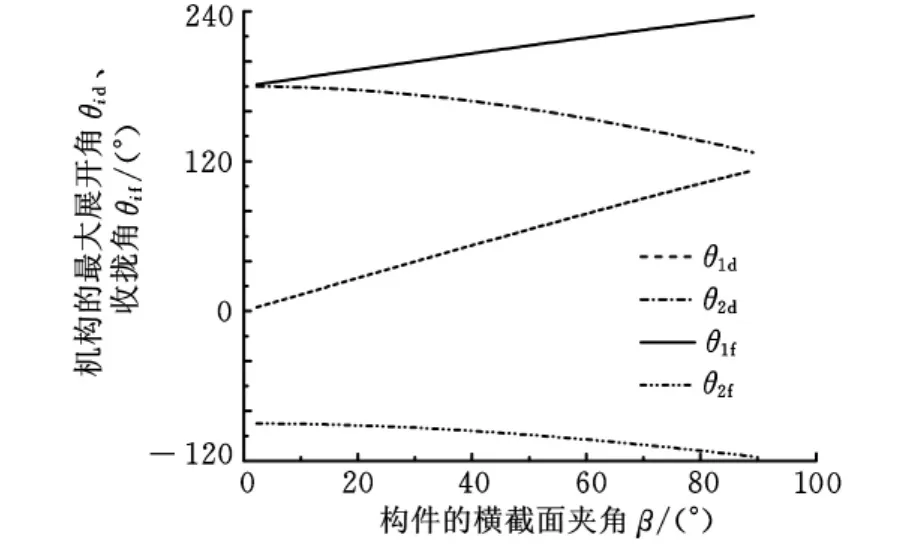
圖4 夾角對機構收攏角與展開角的影響
取β=60°時,由圖4知夾角θ1在展開運動過程中是不斷減小的,夾角θ2在展開運動過程中是不斷增大的,故在循環過程中Δθ1<0,Δθ2>0總是成立的。用MATLAB編程計算可得運動過程中各個夾角的關系,如圖5所示。
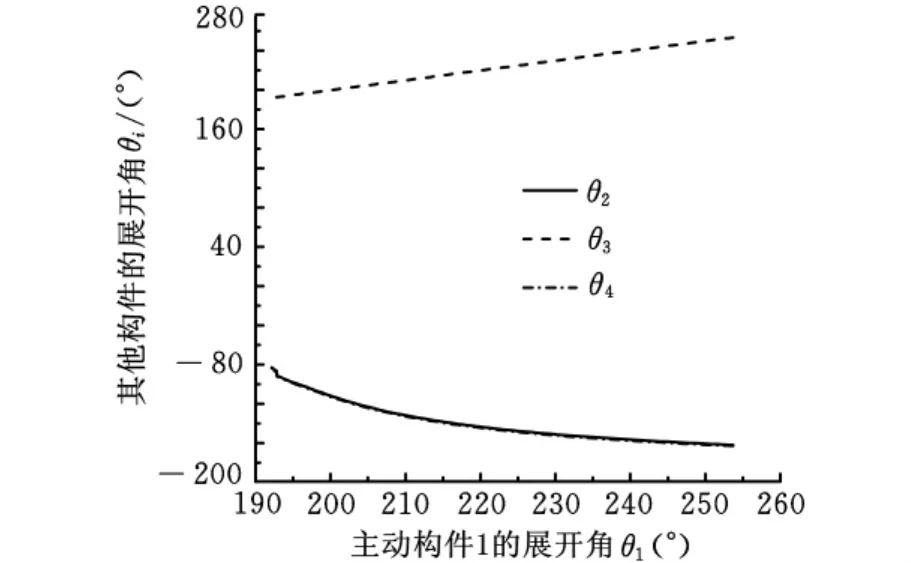
圖5 機構展開過程中各個夾角的關系
4 結論
(1)分析了截面夾角β對四桿環狀可展機構夾角θ在收攏狀態與完全展開狀態時的影響,如圖4所示,隨著β的增大,θ1d、θ1f增大,而θ2d、θ2f減小。
(2)由圖4可知,當截面三角形底角β取允許范圍內的任意值時,四桿環狀可展機構由收攏狀態到完全展開相同時間內夾角θ1與夾角θ2的變化范圍不同,由此可知機構在展開過程中,其原型機構相鄰兩桿的加速度不同。
(3)將廣義逆理論與空間連桿機構分析的標準方法相結合并采用預估校正循環迭代求得四桿環狀可展機構在展開過程中各夾角的變化關系,如圖5所示,從圖中可知,在運動過程中始終有θ1=θ3,θ2=θ4,由此可知四桿環狀可展機構在運動過程中始終有兩個對稱平面。
[1]Gan W W,Pellegrino S.A Numerical Approach to the Kinematic Analysis of Deployable Structures Forming a Closed Loop[D].Cambridge:University of Cambridge,2006.
[2]Gan W W,Pellegrino S.Kinematic Bifurcations of Closed-loop Deployable Frames[C]//Proceedings of the 5th International Conference on Computation of Shell and SpatialStructures.Salzburg,2005:1-4.
[3]Chen Y,You Z.Square Deployable Frames for Space Applications[J].Aerospace Engineering,2006,3(3):347-354.
[4]Chen Y ,You Z,Tibor T.Threefold-symmetric Bricard Linkages for Deployable Structures[J].International Journal of Solids and Structures,2005,42:2287-2301.
[5]Chen Y,Chai W H.Bifurcation of a Special Line and Plane Symmetric Bricard Linkage[J].Mechanism and Machine Theory,2011,46:515-533.
[6]楊毅,丁希侖.基于空間多面體向心機構的伸展臂設計研究[J].機械工程學報,2011,47(5):26-34.
Yang Yi,Ding Xilun.Design and Analysis of Mast Based on Spatial Polyhedral Linkages Mechanism along Radial Axes[J].Journal of Mechanical Engineering,2011,47(5):26-34.
[7]楊毅,丁希侖.四棱錐單元平板式可展開收攏機構的運動特性分析[J].航空學報,2010,31(6):1257-1265.
Yang Yi,Ding Xilun .Kinematic Analysis of a Plane Deployable Mechanism Assembled by Four Pyramid Cells[J].Acta Aeronautica et Astronautica Sinica,2010,31(6):1257-1265.
[8]羅堯治,劉晶晶.基于環形連桿機構原理的可展結構設計[J].工程設計學報,2006,13(3):145-149.
Luo Yaozhi,Liu Jingjing .Design of Retractable Structure Based on Closed-loop Linkages[J].Journal of Engineering Design,2006,13(3):145-149.