MECHATROLINK-II總線在自動BLU疊片設(shè)備中的設(shè)計和應(yīng)用
2013-08-09 07:41:30白雁兵
電子工業(yè)專用設(shè)備 2013年4期
關(guān)鍵詞:設(shè)備
白雁兵
(太原風(fēng)華信息裝備股份有限公司,山西太原 030024)
現(xiàn)場總線技術(shù)是電子、儀表儀器、計算機(jī)技術(shù)和網(wǎng)絡(luò)技術(shù)的發(fā)展成果,是工業(yè)自動化的發(fā)展需要與必然。現(xiàn)場總線使得現(xiàn)場儀表之間、現(xiàn)場儀表和控制室設(shè)備之間構(gòu)成網(wǎng)絡(luò)互連系統(tǒng),實現(xiàn)全數(shù)字化、雙向、多變量數(shù)字通信,為整個工業(yè)系統(tǒng)全數(shù)字化運(yùn)行奠定了基礎(chǔ)。
現(xiàn)場總線控制系統(tǒng)FCS,即網(wǎng)絡(luò)集成式全分布控制系統(tǒng),其特點是控制功能由過去的控制室設(shè)備變?yōu)橹悄墁F(xiàn)場儀表來承擔(dān),控制功能分散化,全數(shù)字化,就有可能組成大型的開放式控制系統(tǒng)。進(jìn)而實現(xiàn)從最高決策到最低設(shè)備層的綜合管理和控制。現(xiàn)場總線的有關(guān)規(guī)范一經(jīng)國際公認(rèn),通過功能模塊參數(shù)標(biāo)準(zhǔn)化,用戶可以實現(xiàn)不同廠家產(chǎn)品的互操作,擇優(yōu)集成。總之基于現(xiàn)場總線技術(shù)的控制策略和網(wǎng)絡(luò)結(jié)構(gòu),引發(fā)了工業(yè)自動化裝置和控制系統(tǒng)的又一次革命。
1 自動BLU疊片機(jī)簡介
自動BLU疊片機(jī)是背光源組裝的關(guān)鍵設(shè)備,該機(jī)主要完成背光單元制作過程中各種膜的疊合工作,在疊合過程中需要根據(jù)各種膜的特性進(jìn)行不同工藝的疊放,自動化程度高,運(yùn)動過程復(fù)雜,整個設(shè)備由許多傳感器、執(zhí)行機(jī)構(gòu)、驅(qū)動裝置等智能設(shè)備組成,對于這些智能現(xiàn)場設(shè)備需要協(xié)調(diào)控制,實現(xiàn)實時、準(zhǔn)確地接收和發(fā)送用于控制的位置數(shù)據(jù)根據(jù)多種工藝的要求。為了精準(zhǔn)的完成操作,控制系統(tǒng)選用橫河F3SP71-4S高速CPU為控制中心,將PLC系統(tǒng)的信息處理能力和控制模塊的運(yùn)動控制能力有機(jī)地結(jié)合到一起,運(yùn)動控制采用MACHATROLINK-Ⅱ總線控制,高效平穩(wěn)的控制14軸伺服電機(jī)和1軸DD電動機(jī)運(yùn)動,具有可控程度高、信息處理能力強(qiáng)、實時調(diào)整方便等特點。總線控制系統(tǒng)組成如圖1所示。
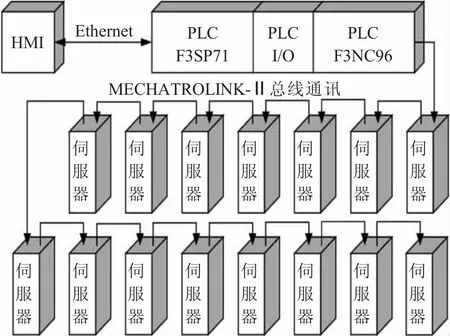
圖1 總線控制系統(tǒng)框圖
在運(yùn)動控制過程中,通過輸入口采集各種用于安全互鎖的傳感器信號及控制信號,使整機(jī)運(yùn)行更加安全可靠,運(yùn)行過程中,觸摸屏實時顯示操作及故障信息,以提示正確操作。在控制過程中,按照自動流程工藝,優(yōu)化控制流程,對每個環(huán)節(jié)都增加了智能報警功能,實時監(jiān)測設(shè)備的運(yùn)行狀態(tài),嚴(yán)格控制膜片的多貼和漏貼問題,在運(yùn)行過程中自動運(yùn)行與手動運(yùn)行可以隨時切換,系統(tǒng)具有自動記憶識別功能,方便用戶使用和調(diào)節(jié)。
2 MECHATROLINK-Ⅱ總線網(wǎng)絡(luò)系統(tǒng)
在網(wǎng)絡(luò)運(yùn)動控制系統(tǒng)的生產(chǎn)過程中,所有控制設(shè)備都是以網(wǎng)絡(luò)形式連接,可以實現(xiàn)遠(yuǎn)距離的調(diào)速及控制參數(shù)的設(shè)定等。由于現(xiàn)場總線可以把多個設(shè)備連接成網(wǎng)絡(luò),并按公開、規(guī)范的通信協(xié)議,實現(xiàn)網(wǎng)絡(luò)上的設(shè)備與計算機(jī)的通訊和控制。所以采用現(xiàn)場總線可以方便地建立遠(yuǎn)程多機(jī)調(diào)速系統(tǒng)。
與計算器網(wǎng)絡(luò)不同,工業(yè)控制器和與之相生的現(xiàn)場總線由各自的廠家獨立發(fā)展起來。因為各個廠家控制器的不同,所推行的現(xiàn)場網(wǎng)絡(luò)技術(shù)不同,并且由于各行業(yè)的應(yīng)用技術(shù)千差萬別以及商業(yè)利益的制約,經(jīng)過十多年的努力,像那樣在計算器網(wǎng)絡(luò)中一統(tǒng)天下的情況終未成就,現(xiàn)場總線的標(biāo)準(zhǔn)至今為止仍呈諸侯割據(jù),群雄爭霸的多種并存的態(tài)勢。但網(wǎng)絡(luò)化總線運(yùn)動控制系統(tǒng)的構(gòu)架大同小異,一般由多個分布傳動點構(gòu)成,網(wǎng)絡(luò)化系統(tǒng)主要由變送器、交流伺服驅(qū)動器、交流伺服電機(jī)、現(xiàn)場總線、控制器或獨立式運(yùn)動控制器、控制計算機(jī)等構(gòu)成。在此網(wǎng)絡(luò)化系統(tǒng)基礎(chǔ)上,通過遠(yuǎn)程網(wǎng)絡(luò)進(jìn)一步構(gòu)成遠(yuǎn)程控制系統(tǒng)。
隨著自動化控制技術(shù)發(fā)展,對現(xiàn)場網(wǎng)絡(luò)總線技術(shù)的實時性和確定性以及擴(kuò)展性的要求也不斷提高,現(xiàn)在高速可用于運(yùn)動控制的現(xiàn)場總線 如 Profibus-DPV2、SERCOS、DeviceNet、MECHA TROLINK 等,MECHATROLINK-Ⅱ總線是一種注重多臺伺服器間的精確同步控制及高速性的現(xiàn)場通信總線,實現(xiàn)了實時 、準(zhǔn)確地接受和發(fā)送用于控制的位置數(shù)據(jù)、速度數(shù)據(jù)、輸入輸出狀態(tài)等信息,完成靈活的,高精度的運(yùn)動控制,特別適用于需要各軸間協(xié)調(diào)同步和插補(bǔ)控制的應(yīng)用,除了控制機(jī)械所必須的轉(zhuǎn)矩、位置、速度控制功能以外,還可實現(xiàn)要求精度極高的相位協(xié)調(diào)控制,更可以完成在線任意切換控制方式,如系統(tǒng)在位置控制方式進(jìn)行中,在線切換為扭矩控制方式,是復(fù)雜的機(jī)械動作得以高效平穩(wěn)地控制。
通過對MECHATROLINK實行開放化,以求不斷擴(kuò)充其可連接的組件。隨著MECHATROLINK家族的不斷壯大,用戶可以自由連接使用諸如控制器、伺服驅(qū)動器、步進(jìn)電機(jī)驅(qū)動器等系統(tǒng)所需設(shè)備。在MECHATROLINK-Ⅱ中,一條通信電纜最多可連接30個站點,大幅度削減了配線費(fèi)用和時間,從而以較少配線實現(xiàn)了多軸系統(tǒng)控制。無論是I/O系統(tǒng)還是運(yùn)動系統(tǒng),通過網(wǎng)絡(luò)化均具有節(jié)省配線、構(gòu)造簡單、節(jié)約成本等優(yōu)越性,由于命令的參數(shù)化,取消了以往的速度/轉(zhuǎn)矩指令用D/A轉(zhuǎn)化器和指令脈沖發(fā)生器,使伺服控制系統(tǒng)抗干擾性更強(qiáng),更簡單化。
3 MECHATROLINK-Ⅱ的設(shè)計應(yīng)用
3.1 操作原理
在自動BLU疊片機(jī)中,選擇橫河支持MECHATROLINK-II通信的F3NC96定位模塊,用于控制電機(jī)的運(yùn)動控制。對伺服電機(jī)精準(zhǔn)的控制是現(xiàn)場總線控制的重要環(huán)節(jié)。該定位模塊提供一個用于連接以MECHATROLINK-II為基礎(chǔ)的高速運(yùn)動現(xiàn)場網(wǎng)絡(luò)的接口,可以實現(xiàn)15軸電機(jī)的運(yùn)動控制,根據(jù)CPU模塊的指令將MECHATROLINK-II命令傳送到外部設(shè)備(從動設(shè)備),并接收來自外部設(shè)備的MECHATROLINK-II響應(yīng)數(shù)據(jù)。該定位模塊的操作原理,如圖2所示。
3.2 命令流程
通過CPU模塊,首先設(shè)置總線通訊地址,然后將命令代碼以及參數(shù)如目標(biāo)位置(參照單位)和目標(biāo)速度(參照單位/s)寫入命令參數(shù)區(qū),建立總線通訊網(wǎng)絡(luò),通訊正常后,就可以對現(xiàn)場設(shè)備進(jìn)行控制。圖3為MECHATROLINK-II命令程序流程圖。
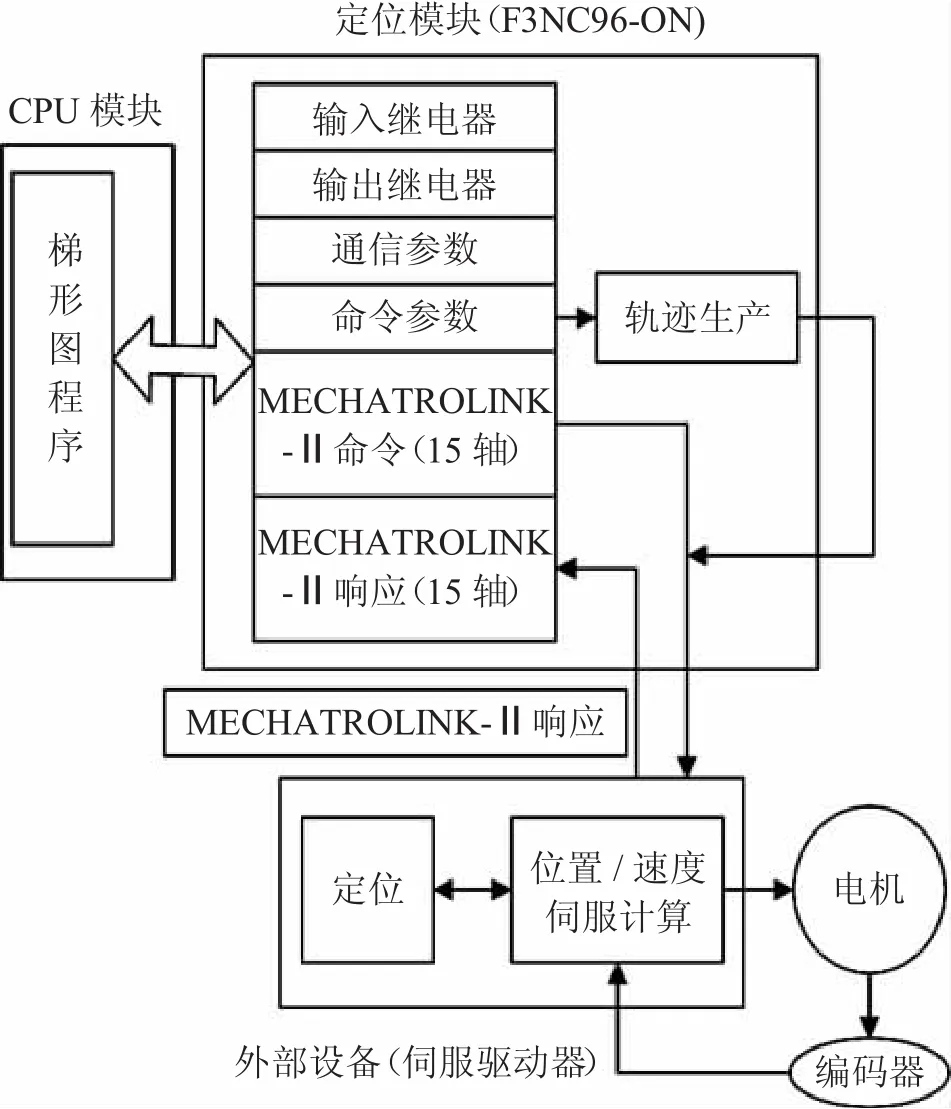
圖2 定位模塊的操作原理圖

圖3 MECHATROLINK-II命令程序流程圖
CPU向?qū)?yīng)于定位模塊軸1至軸15的外部設(shè)備發(fā)送MECHATROLINK-II命令,在數(shù)據(jù)位置號 01至 60指定 MECHATROLINK-II命令代碼和所需的參數(shù)值。若要傳送擴(kuò)展MECHA-TROLINK-II命令,指定命令代碼(COMMAND)值為-1,并在擴(kuò)展MECHATROLINK-II命令參數(shù)區(qū)指定要傳送的數(shù)據(jù)。接通“發(fā)送命令”繼電器(Y33至 Y47),確認(rèn)“響應(yīng)收到”繼電器(X01至 X15)已接通。通過檢查“定位完成”繼電器以及個別命令所需的狀態(tài)確認(rèn)定位操作完成。
3.3 程序控制
要實現(xiàn)對自動BLU疊片機(jī)的MECHATROLINK-II的總線控制,必須對PLC進(jìn)行編程,通過程序?qū)崿F(xiàn)PLC與變頻器信息交換的控制。PLC程序應(yīng)完成MECHATROLINK-II通訊初始化、控制命令字的組合、代碼轉(zhuǎn)換,實現(xiàn)自動BLU疊片機(jī)的定位控制、實時監(jiān)控及對應(yīng)答信息的處理等工作。
PLC梯形圖程序(以1軸程序為例)
(1)啟動通訊控制:

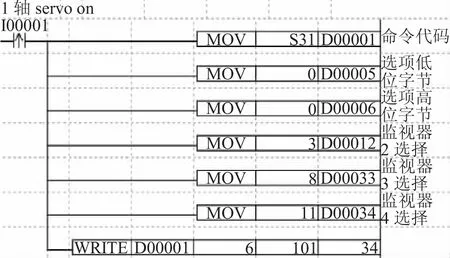
(2)伺服ON控制
(3)定位控制
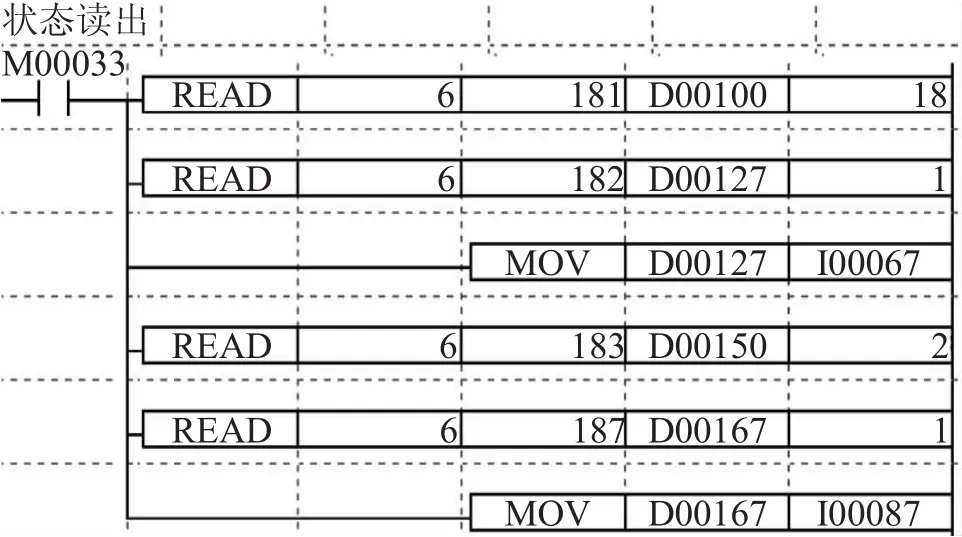
(4)狀態(tài)監(jiān)控
通過對MECHATROLINK-II的程序設(shè)計,最終實現(xiàn)對自動BLU疊片機(jī)的終端控制。

4 結(jié) 論
MECHATROLINK可連接豐富的組件,可根據(jù)客戶需要任意配置,此外MECHATROLINK標(biāo)準(zhǔn)化組織也已經(jīng)將采用RS-485物理層的MECHATROLINK-II總線升級為采用工業(yè)以太網(wǎng)物理層的MECHATROLINK-III,更高速更好的面向運(yùn)動控制系統(tǒng),以解決現(xiàn)有機(jī)械控制系統(tǒng)、數(shù)控系統(tǒng)控制器與伺服間采用模擬接口方式存在的連接復(fù)雜、易于干擾等問題。
[1] 劉艷強(qiáng),單春榮.工業(yè)以太網(wǎng)現(xiàn)場總線EtherCAT及驅(qū)動程序設(shè)計[J].制造技術(shù)與機(jī)床,2007,29(11):22-29.
[2] 郎鵬,李國紅,高志芳.論電子專用設(shè)備技術(shù)平臺發(fā)展戰(zhàn)略[J].電子工藝技術(shù),2006,27(6):318-321.
[3] 張紀(jì)明.基于PC的機(jī)器視覺系統(tǒng)研究[J].可編程控制器與工廠自動化,2006,(11):107-110.
猜你喜歡
中國特種設(shè)備安全(2022年6期)2022-09-20 02:52:28
當(dāng)代工人(2020年13期)2020-09-27 23:04:20
經(jīng)濟(jì)技術(shù)協(xié)作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年10期)2018-08-04 03:24:48
家庭影院技術(shù)(2017年11期)2017-12-20 08:10:57
工業(yè)設(shè)計(2016年12期)2016-04-16 02:52:00
IT時代周刊(2015年8期)2015-11-11 05:50:37
汽車維修與保養(yǎng)(2015年1期)2015-04-17 03:25:28
設(shè)備管理與維修(2015年12期)2015-04-09 06:57:00
