電子液壓式力矩保護器工作原理
2013-08-14 06:06:32李征
機械工程師 2013年5期
李征
(三河市新宏昌專用車有限公司,河北三河 065201)
1 引言
直臂卷揚式隨車起重機原使用的電子式力矩保護器,當力矩達到額定力矩的100%~110%時,切斷主油路,起到安全保護作用,但是不符合GB6067.1-2010《起重機械安全規程》中應允許向安全方向操作的規定;而起重量10t 以上的隨車起重機,由于變幅油缸三角形幾何關系,液壓式力矩保護閥誤差較大,不符合“當力矩達到額定力矩的100%~110%時應切斷力矩增大方向的油路”的規定。本文僅就一種新型的電子液壓式力矩保護器的工作原理進行探討。
2 隨車起重機的力學模型
直臂卷揚式隨車起重機最大額定起重量時的力學模型和幾何關系分別見圖1、圖2。

圖1 直臂隨車起重機力學模型
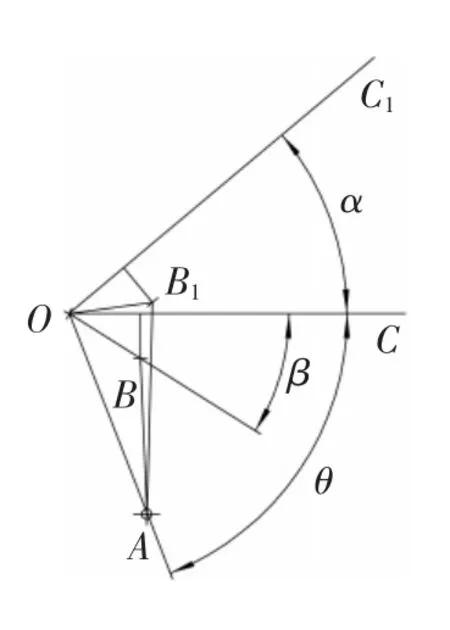
圖2 直臂隨車起重機變幅幾何關系
隨車起重機起升力矩為非等力矩原則,不同的臂長和不同的起升仰角所需的起升力矩是不相同的,根據圖1中的受力關系,得出下式:

根據圖2 幾何關系推導,得出如下力矩關系:
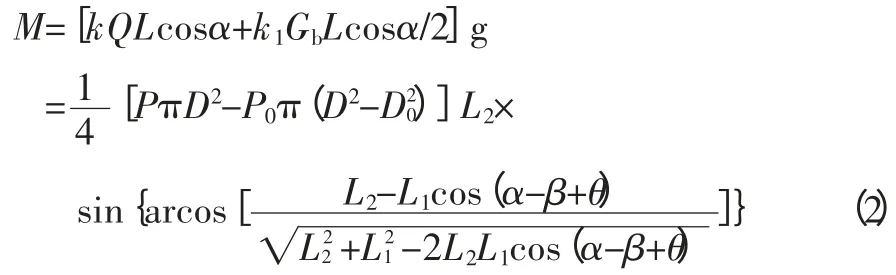
式中:P-變幅油缸無活塞桿腔工作壓力,MPa;k-起升載荷動載系數;k1-起重臂自重動載系數;Q-額定起重量,kg;R-工作幅度,mm;r-回轉中心到起重臂回轉中心的距離,mm;Gb-起重臂質量,kg;Rb-起重臂重心到起重臂回轉中心的距離,mm;D-變幅油缸直徑,mm;D0-變幅油缸活塞桿直徑,mm;P0-變幅油缸活塞桿腔工作壓力,MPa;g-重力加速度,9.81m/s2;α-伸縮臂仰角,(°);β-變幅油缸與伸縮臂交點和伸縮臂回轉中心連線與水平線的夾角,(°);θ-變幅油缸與立柱交點和伸縮臂回轉中心連線與水平線的夾角,(°);L1-變幅油缸與立柱交點到伸縮臂回轉中心的距離,mm;L2-變幅油缸與伸縮臂交點到伸縮臂回轉中心的距離,mm。
由式(2)知,與起升力矩相關的各參數除了P、P0、α 外均為已知量,只要測量三個參數即可與額定值進行比較。
3 工作原理
電子液壓式力矩保護器工作原理有兩種方式:(1)動力液壓油分流控制方式;(2)動力液壓油截止控制方式,分別見圖3 和圖4。
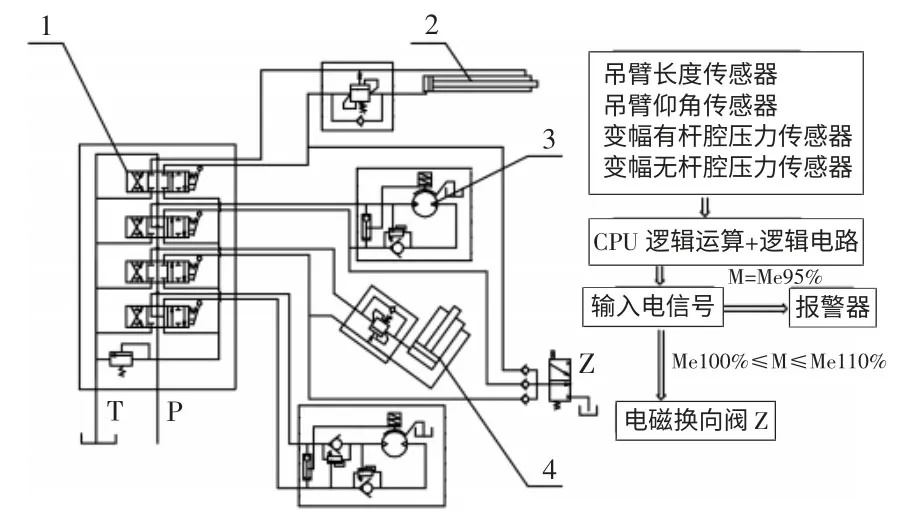
圖3 動力液壓油分流控制方式工作原理
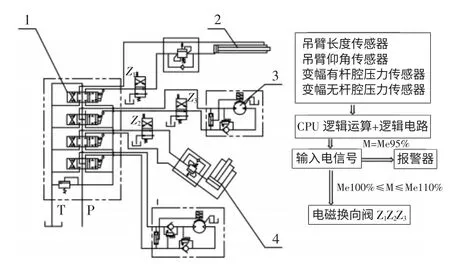
圖4 動力液壓油截止控制方式工作原理
3.1 動力液壓油分流控制方式工作原理
吊臂長度傳感器、吊臂仰角傳感器、變幅有桿腔壓力傳感器和變幅無桿腔壓力傳感器將檢測信號傳遞給CPU,CPU 經過邏輯運算,當計算起升力矩達到額定起升力矩的95%時,將信號傳輸給報警器,發出報警聲;當計算起升力矩達到額定起升力矩的100%~110%時,接通電磁換向閥Z 電路,電磁閥換向,P 和T 口直接接通;當操作吊臂伸縮油缸2 伸出、卷揚機構3 起升、變幅油缸4 回縮時,動力油直接通油箱,該方向無法動作,而可以實現反方向的動作;當吊臂伸縮油缸2 回縮、卷揚機構3 下降、變幅油缸4 伸出后,起升力矩值減小,當起升力矩值小于額定起升力矩100%后,CPU發出信號,切斷電磁換向閥Z 電路,電磁閥換向,切斷P1和T,系統恢復正常。
該系統利用電磁換向閥Z 分流,由于單向閥和電磁換向閥以及回油管路的壓力損失,在分流處會存在一定的背壓,對變幅和伸縮動作沒有影響,但對空載卷揚過卷報警會有一定的影響,如果分流油路壓力損失大,過卷報警裝置失靈,此時可以采取以下措施:(1)盡量采用流量大、壓力損失小的單向閥和電磁換向閥及較大管徑的油路,壓力損失控制在1MPa 以下。(2)在卷揚下降油路上加裝減壓閥或卷揚起升油路上加裝順序閥,提高空載卷揚工作壓力。
3.2 動力液壓油截止控制方式工作原理
吊臂長度傳感器、吊臂仰角傳感器、變幅有桿腔壓力傳感器和變幅無桿腔壓力傳感器將檢測信號傳遞給CPU,CPU 經過邏輯運算,當計算起升力矩達到額定起升力矩的95%時,將信號傳輸給報警器,發出報警聲;當計算起升力矩達到額定起升力矩的100%~110%時,接通電磁換向閥Z1、Z2、Z3電路,電磁閥換向,P1截止;當操作吊臂伸縮油缸2 伸出、卷揚機構3 起升、變幅油缸4 回縮時,動力油截止,該方向無法動作,而可以實現反方向的動作;當進行吊臂伸縮油缸2 回縮、卷揚機構3 下降、變幅油缸4 伸出后,起升力矩值減小,當起升力矩值小于額定起升力矩100%后,CPU 發出信號,切斷電磁換向閥Z1、Z2、Z3電路,電磁閥換向,系統恢復正常。
該系統為利用電磁換向閥換向截止液壓油通向執行機構,該系統安全可靠,需要利用3個電磁閥,成本較高,需要較大的安裝空間。
4 結論
以上兩套系統均可滿足直臂卷揚式隨車起重機力矩安全保護功能,第一種方法相對簡單、成本較低,建議優先采用。