DSRC通信系統架構設計與實現
2013-08-16 06:28:36于東輝
科技視界 2013年1期
向 昊 于東輝
(重慶郵電大學自動化學院,中國重慶400065)
0 引言
21 世紀將是公路交通智能化的世紀, 人們將要采用的智能交通系統, 是一種先進的一體化交通綜合管理系統。 ITS 是智能交通系統(Intelligent Transportation System)的簡稱,是未來交通系統的發展方向,它是將先進的信息技術、數據通訊傳輸技術、電子傳感技術、控制技術及計算機技術等有效地集成運用于整個地面交通管理系統而建立的一種在大范圍內、全方位發揮作用的,實時、準確、高效的綜合交通運輸管理系統[1-2]。
DSRC 采用專為車間通信的WAVE 規范以及根據IEEE802.11 標準修改制定的IEEE 802. 11p 標準。 目前許多文獻針對DSRC 所進行的研究主要集中在對通信協議或者交通系統某一項參數設置不同時所得出的通信系統實時性與延遲性的研究, 但是并沒有針對整個ITS系統的架構角度來考慮對DSRC 通信系統的實現。
本文針對DSRC 在ITS 環境下的系統架構,提出了智能通信平臺的整個設計, 對于DSRC 系統的通信軟件架構的編寫與實車試驗,揭示了DSRC 在ITS 道路環境下架構設計流程與實車通信效果。
1 DSRC 通信平臺系統架構設計與仿真
1.1 DSRC 系統架構之間的關系
DSRC 系統主要包括三個部分:車載單元(OBU)、路邊單元(RSU)以及專用短程通信協議。 通過車載OBU 收發器與路側RSU 收發器,可實現車輛與道路之間的信息交互。 DSRC 協議是在OSI 的基礎上提出的三層協議結構,即物理層、數據鏈路層(LLC 與MAC 子層)、應用層,如圖1 所示。
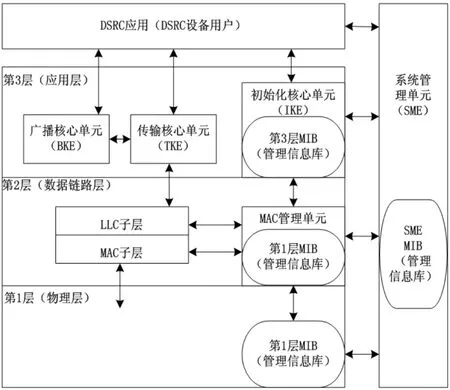
圖1 調制方式系統架構的關系Fig.1 Relationship between the modulation and system architecture
1.2 智能交互系統平臺通信socket 編寫(物理層與數據鏈路層)
在統一車載單元OBU 與智能車載終端的接口的基礎上, 明確車載單元OBU 與路邊單元RSU 與智能車載智能終端信息交換內容的顯示,根據不同的需求(例如車主得到推薦充電站排序,選擇充電站;通過RSU 接收電網實時發送當前各區域的充放電能力、ITS 中心計算推薦的充電站、EV 發送剩余里程數、SOC、 速度等信息到ITS 中心)均可以采用VS2010 進行軟件socket 開發[3]。
本文采用周立功CAN 卡來讀取車輛CAN 信號, 通過VS2010 使用C++來編寫通信平臺MFC 文件與socket 通信程序。 要傳遞車載信息,首先要對CAN 卡的設置參數、如何獲取設備信息、啟動CAN 和復位CAN 和發送數據有一定的了解。 如圖2 所示,接口函數庫主要有:打開、關閉、初始化CAN、獲取設備信息、獲取錯誤信息、獲取CAN 狀態、設置緩沖區大小,收發數據等功能。
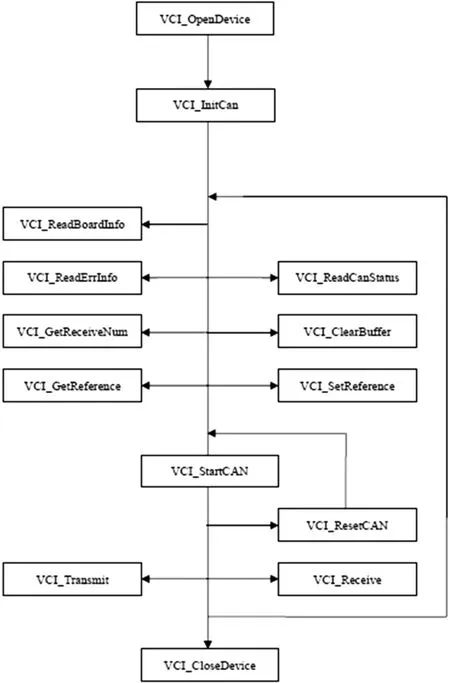
圖2 CAN 卡接口庫函數使用流程Fig.2 The use process of CAN card interface library functions
VCI_SetReferenc 和VCI_GetReference 這兩個函數是用來針對各個不同設備的一些特定操作的。 比如CAN232 的更改波特率,設置報文濾波等等。函數中的PVOID 型參數pData 隨不同設備的不同操作而具有不同的意義。
試驗車CAN 信號可以正常根據我們的CAN DBC 文件中的協議接收顯示數值,將CAN 卡接入CANoe 總線后能夠成功獲得并顯示如方向盤轉角以外的信號,信號穩定。未調試之前由于CAN 總線的頻率為100Hz,為了使定時器獲取信號頻率高于CAN 總線發送頻率,所以設置的頻率較高,但是發現刷新過快,所以選擇500ms 的刷新頻率(此刷新頻率為CANoe 信號)為目前的信號顯示刷新頻率。
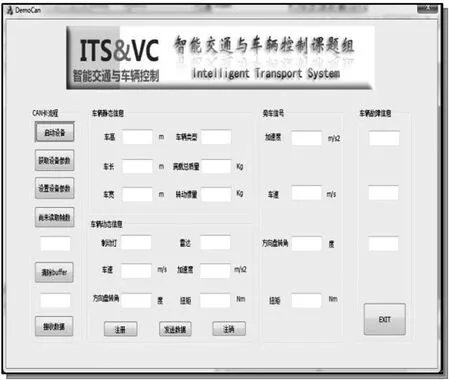
圖3 發送與接收顯示界面Fig.3 Sending and receiving display interface

圖4 NCTUNs 仿真建模Fig.4 NCTUNs simulation modeling
1.2 MFC 數據接發顯示軟件(應用層)
根據上述情況, 將通信所需的socket 程序編寫為基于VS2010 的發送與接收顯示界面,如圖3 所示。
當CAN 卡連接上總線時,讀取信號后在此界面顯示,并且由于此界面具有socket 發送信號的功能,在顯示自車的車輛動態與靜態參數時,旁車也可以接收到本車的各類車身信號。
2 ITS 環境仿真模型搭建
參照之前的DSRC 物理層與數據鏈路層協議,使用6Mb/s 的傳輸速率,28dBm傳輸功率, 包大小分布范圍400-500b,使用NCTUNs 自帶的Car Agent 模型, 為車路相互通信,仿真時間設置為400s。 設定了2 種仿真道路環境:一個通用城市平面交叉口;一段快速路。 性能指標中的時延表示數據或分組從鏈路的一端傳送到另一端所消耗的時間,包括了發送時延、傳播時延、處理時延和排隊時延;吞吐量表示在單位時間內通過信道的數據量如圖4。
交叉口:雙向2 車道,交叉口設計車速為40km/h(10m/s)。 信號周期為100s,2相位控制,黃燈時間為3s,紅燈時間為45s(信號機使用NCTUns 自帶的Signal 模型)。
快速路段:雙向4 車道,長度為3km,車速限制范圍為60-180km/h。
最先到達交通信號燈的車輛將數據包發送給周圍車輛,仿真結果得出時延范圍在100-120/ms,吞吐量變化在8-11kb/s,傳輸距離為1000m,基本滿足美國交通運輸部對車路協同的要求。
3 實車傳輸各類信號測試
經過上述軟件編寫與軟件仿真等理論準備,建立實車通信實驗平臺。
實車調制實驗分為以下幾步:
3.1 車輛逆變器安裝
將12V 蓄電池放入試驗車,通過逆變器給車上所需220V 的DSRC 電源設備供電。
3.2 信號采集與發送的確認
實驗地點在圍繞車庫的一整圈包括樓房屋遮擋的部分。 信號表現良好,在觀測基站接收情況來講延遲與顯示刷新均處于接受范圍內,通過周期發送方式能夠正常將信息發給基站。
3.3 數據包的性能收發測試
在車庫與樓房附近繞環圈行駛,定制5.8GHz 天線表現良好,在直線與可視距離上丟包率基本沒有,行駛到建筑物之后由于衰減原因丟包開始有緩慢增加,甚至斷過一次,不過很快又恢復通信,將基站天線位置放置在制高點應該能解決如上問題,并且使距離達到最大。
通信性能方面:在中間間隔到有三棟樓的時候才開始有短暫的數據丟包,其他時刻通信性能良好,使用ping 方式測得的round-trip 時間均低于3.4ms,2 組實驗平均round-trip 時間為1.7ms,效果理想,如果是車輛安全相關的制動信號等信號的傳輸,可以滿足要求。做數據傳輸實驗時,觀測方為基站, 在不進行限速的情況下,踏板踩到底時候的扭矩顯示為448Nm,與實車性能相符如圖5。
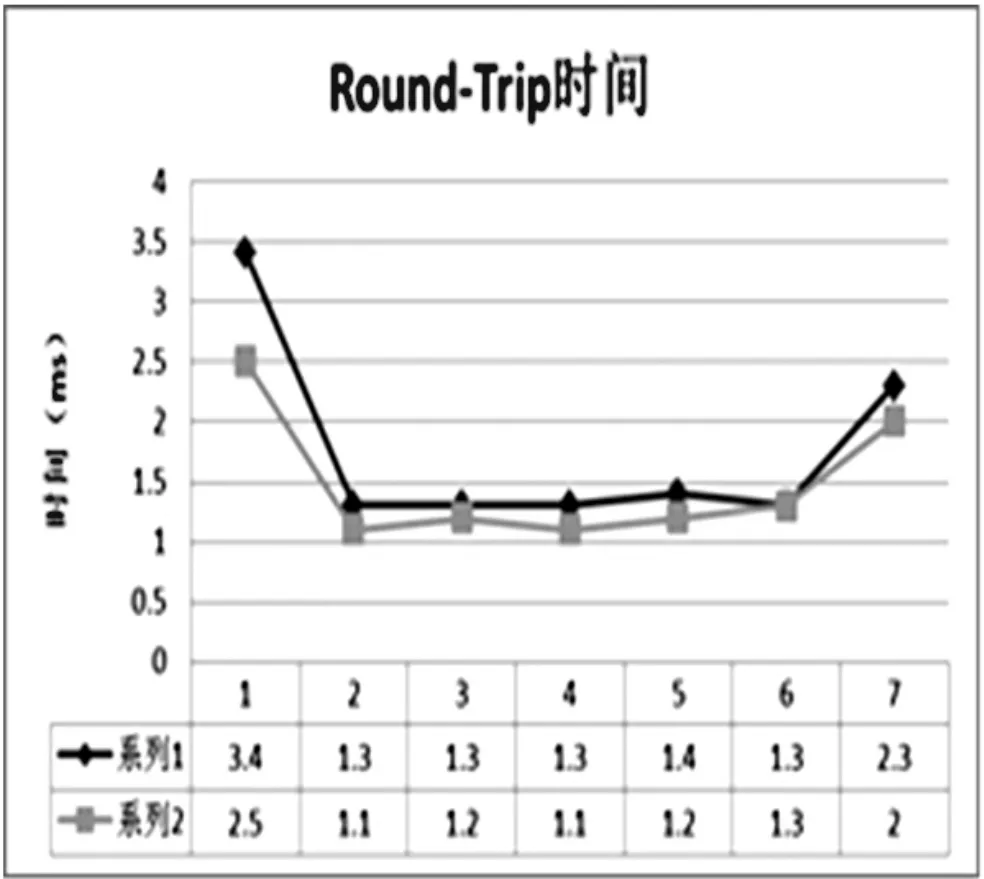
圖5 實車環境數據包round-trip 時間Fig.5 The real vehicle environmental data packet round-trip time
4 結論
在DSRC 設備傳輸CAN 信號情況下的實際測試, 根據汽車研究所周圍的道路環境下進行兩車之間的通信, 車車之間能夠順利進行CAN 信號的傳遞,但是如果車間遇到有較大障礙物的情況(如樓房)下通信時,會有丟包產生,這與諸多因素有關,設備的發送功率,天線的增益等等,還有就是做實驗的時候天線是放在車載內部,改進的方式有如下幾點:
4.1 根據功率放大器將機器的功率提升到20dBm 以上;
4.2 將天線的接口方式改變為連接線,從而引至車輛頂端;
4.3 如果遇到衰減的情況,最好的方式是布置中繼節點,利用多跳的方式來增加信號的可靠性;
4.4 如果是多車通信的情況下,盡量將無線接入點放置在中央位置,并且遠離墻壁或者金屬等能引起干擾的物體;
4.5 據推斷,普通的無線電話信號不會對5.8GHZ 的Denso 信號產生干擾,于是考慮是否同時購入非全向的天線(周圍的所有方向上天線都能夠發射信號。 如果設備靠近外墻,無線信號的一半將被送到屋外,浪費了設備的大部分功率), 所以可以同時考慮高增益天線的實驗結果(集中到一個方向發射,將兩種天線搭配在DSRC 設備上使用)。
[1]Heinrich B, Edmund J R. Effectiveness of vehicle and roadside antenna locations for direct short range, vehicle to roadside communication [A]//3th Annual World Congress on Intelligent Transport System. Florida,1996:2 105.
[2]彭選榮,鐘慧玲,徐建閩.專用短程通信(DSRC)協議研究及應用展望[J].移動通信,2003 年增刊.
[3]屠域,徐建閩,鐘惠琳.DSRC 系統通信協議的開發計算機工程[J],2003,12,29(21).
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
工業設計(2016年12期)2016-04-16 02:52:00
