基于AMESim的甘蔗收割機液壓系統建模與仿真研究
2013-08-16 03:02:58王海飛周忠華張傳嶺
重慶交通大學學報(自然科學版) 2013年5期
關鍵詞:系統
王海飛,周忠華,張傳嶺
(長安大學道路施工技術與裝備教育部重點實驗室,陜西西安710064)
我國是世界排名第3的產糖大國,僅次于巴西和印度。甘蔗在我國農業經濟中占有重要地位,其產量和產值僅次于糧食、油料和棉花,居第4位。然而,在我國,甘蔗生產機械化程度低,甘蔗收獲勞動強度大,對于我國甘蔗產業十分不利,因此實現甘蔗收割機械化對于提高甘蔗收獲勞動生產率、降低蔗糖生產成本、提升我國蔗糖的國際競爭力具有重要的實用價值和戰略意義[1-2]。
甘蔗收割機工作裝置功能多,結構復雜,運用液壓技術能夠很好的改善和簡化結構設計,提高整機的性能,因此設計優良的液壓系統對甘蔗收割機的作業質量十分關鍵。
1 甘蔗收割機的類型和主要結構組成
甘蔗收割機類型主要有兩種,一種是切斷式,一種是整桿式。
切段式甘蔗收割機工作過程主要有分蔗、扶蔗、切梢、切蔗根、輸送蔗株、除雜、切段、輸送蔗段并篩除泥沙、風選除雜、蔗段裝車等。作業時,切梢圓盤刀切斷甘蔗梢并將其拋向已切割地面,割臺兩側的螺旋扶蔗器把甘蔗植株導入割臺。甘蔗植株被機架推向前傾斜,根部被底部的圓盤刀切斷,蔗株經提升輥和上下輸送輥送到切段裝置,被切成25~40 mm的甘蔗段先后經2個軸流風機吸除輕雜物,較重雜物在升運器的底板孔中排出機外,甘蔗段則由升運器拋送入平行行駛的裝運車中。這種方式收割的甘蔗要在16~24 h內送到糖廠加工,否則會造成甘蔗的變質和糖分的損失,其傳動系統主要組成如圖1(a)。
整桿式收割機的工作過程,一般都具有切梢、扶蔗、切根喂入、剝葉、輸送、集蔗等主要工序。由于存在著收割完后的甘蔗還需用人工打捆裝車的缺點,所以在國外很少使用。由于我國對于甘蔗收割機的研發起步較晚,以及經濟發展水平等各因素的影響,整桿式甘蔗收割機在我國仍在廣泛的應用,與大型甘蔗收割機械相比,小型甘蔗收割機械則具有體積小、重量輕、結構簡單、價格低、適用于丘陵地帶等復雜地形的甘蔗收割[3]。中國甘蔗主產地在南方地區,這些地區多是丘陵,坡地較多,平原種植很少。由于大型甘蔗收割機價格昂貴,只適用于平原地區,在我國很難推廣。因此,推廣輕便、經濟的適合丘陵地區小型甘蔗收割機具有廣闊的空間和巨大的市場。其傳動系統的主要組成如圖1(b)。其主要技術參數如表1。
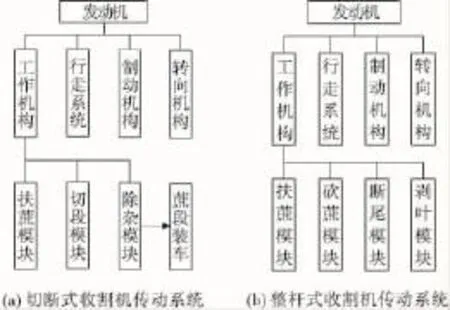
圖1 甘蔗收割機框架Fig.1 Framework of sugar cane harvester
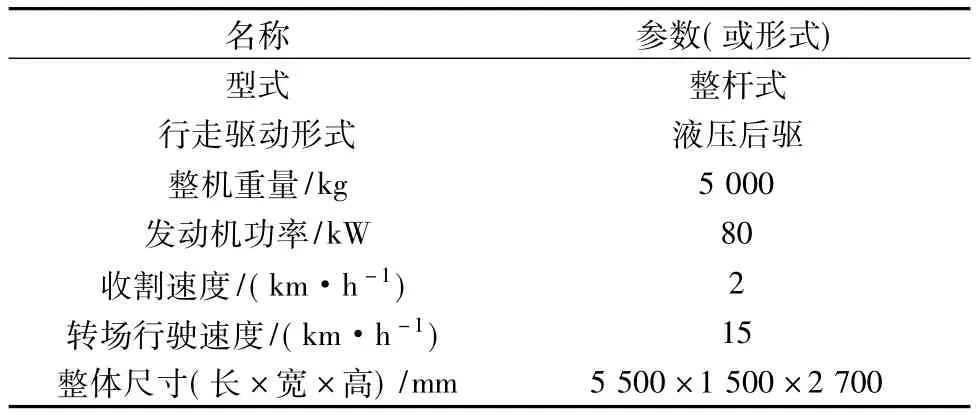
表1 主要技術參數Table 1 Main technical parameters
2 閉式行走液壓系統
閉式行走液壓系統由左右兩側行走液壓系統組成,每側有1個變量泵為1個變量馬達供油,一側的液壓系統原理如圖2。
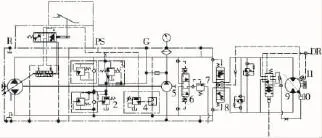
圖2 閉式行走液壓系統原理Fig.2 The closed walk hydraulic system principle
2.1 液壓泵馬達控制特點
變量泵控制的最大特點就是裝有一個DA閥[4],通過使用帶有DA-控制功能的變量泵可以方便地組成靜壓“自動變速機構”;通過“加大油門”將發動機轉速提高,以使車輛開始行駛;當行駛阻力增大時(例如:爬坡),為了使發動機不致過載,DA-控制會調節行駛速度,使之與發動機的可用功率相匹配;同理,因工作機構同時工作而需消耗發動機的一部分功率時,也會產生同樣的效果,即防止發動機過載或避免發動機熄火。其控制原理如圖3。
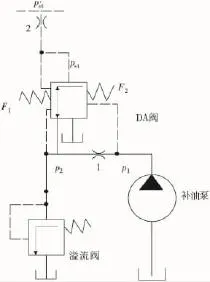
圖3 DA閥控制原理Fig.3 DA valve control principle
補油泵流量Qb在節流閥上產生壓降Δp,流量Qb越大,表明n越大,即Δp越大。

式中:Δp為節流閥1前后的壓差;k為節流閥常數;n為泵轉速。
建立閥芯的力平衡方程:

式中:pst為DA閥輸出的控制壓力;A,A1分別為液壓閥芯參數;F1,F2分別為調節彈簧壓力,ΔF= ΔF1-ΔF2;α為放大系數,標準DA閥取值6.9。
pst通過節流閥2變為 p'st,控制壓力p'st通過換向閥進入變量泵的變量油缸,變量油缸中p'st,對中彈簧等效壓力pz,泵出口工作壓力p這3者之間在某一排量位置上取得平衡。

p'st= βpst(β為系數)式中:V為變量泵排量;k0為常數;k1,x分別為對中彈簧剛度和位移;k2為始終調節參數。其中:控制執行壓力P'st的大小,通過節流閥直徑和調節彈簧力F來調節。
由于農業機械在工作時對速度穩定性要求較高,所以變量馬達的控制方式采用的是液壓兩點控制,這種控制方式只有最大排量和最小排量兩種情況,當重載時選擇大排量,輕載時選擇小排量。
2.2 行走系統調速回路
甘蔗收割機的行走系統調速回路其實是一種分段式恒扭矩調速回路(馬達兩點式控制),低速時輸出穩定大扭矩,高速時扭矩相應降低,但依舊穩定。在低速段,馬達排量為大排量,利用變量泵進行調節,當泵的排量由小調到大時,輸出功率隨之線性增加,馬達獲得最大輸出轉矩,且處于恒轉矩狀態,當馬達排量為小排量時,轉矩相應降低,轉矩恒定。
3 開式工作機構液壓系統
筆者設計的方案為整桿式小型甘蔗收割機的工作機構液壓系統,整個系統為負荷傳感控制,負荷傳感控制系統包括負荷傳感控制閥和負荷傳感控制泵。主要的執行機構有扶蔗馬達、切削馬達、輸送馬達、壓倒馬達、剝葉馬達、根切馬達、扶蔗升降油缸、角度調節油缸和切削升降油缸等,其原理如圖4。
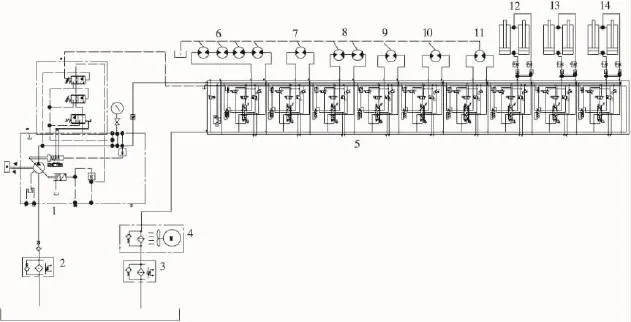
圖4 工作機構負荷傳感液壓原理Fig.4 Work agency load sensing hydraulic principle
3.1 負荷傳感控制系統的主要優點
傳統的負荷傳感控制系統(LS系統)在負載所需功率小于機器所提供的功率時,該系統工作良好,然而當負載所需功率大于機器所提供的功率時,即當閥口全打開時工作系統要求的流量超過泵供油能力的極限時,最高負荷回路上的執行元件速度會迅速降低直至停止,從而使甘蔗收割機失去復合動作的協調能力,這會嚴重影響甘蔗收割機的工作質量[5-7]。
與傳統的液壓系統比較,新負荷傳感控制系統有著如下顯著地優點。
1)節省能量消耗。使用負荷傳感變量系統,泵能夠根據負荷的情況對自身的排量進行調節,由壓差傳感器檢測負荷壓力,通過泵閥控制器發出指令,根據負荷的需求調節液壓泵排量,使泵輸出壓力始終比負荷壓力高出較小的恒定值(設定壓力),從而保證液壓泵輸出功率與負載相適應,減小能量損失。
2)流量控制精度高,不受負荷壓力變化的影響。
3)幾個執行元件可以同步運動或以某種速比運動,且互不干擾。
文中方案采用的是力士樂的不受負荷影響的流量分配系統,即LUDV負荷傳感系統。在一般情況下,LS系統、LUDV系統的工作性能基本相同,但當執行元件所需流量超過泵輸出流量極限時,LUDV系統中各節流孔壓差Δp始終保持相等,流量總是與節流孔面積成正比,所有執行元件將以同一比率減速,并能獨立平穩地工作,而與負荷和泵流量大小無關。
3.2 LUDV系統的工作原理
為能簡明的分析 LUDV控制系統,筆者給出LUDV控制系統的部分執行元件原理簡圖(圖5)。其中負荷傳感變量泵(圖4)的變量機構根據來自LS口的負荷壓力可自動地對泵的斜盤擺角進行調節,從而控制泵的流量始終等于執行元件所需流量。當執行元件所需流量減小時,泵的擺角自動調小,從而減小泵的流量。反之,則泵的擺角增大,增大泵的流量。

圖5 LUDV控制系統原理Fig.5 LUDV control system principle
一般情況下,對于流量有:

假設p1<p2,則節流孔的面積A1>A2,從圖5中可以得到:

由于節流閥上的壓差Δp是設定值,即Δp為常數,所以有:

對于負載最大的執行回路,其壓力補償閥的壓力補償為0,即:

LUDV控制系統是節流閥后補償,通過梭閥篩選出最大的負載壓力反饋到變量泵,同時也反饋給各路壓力補償閥,這就保證了多路閥控制的各執行元件通過多路閥的壓差相同,這樣流量就只和多路閥中的各閥開口度有關,即使所需流量不足的時候,各個執行元件流量也可以按比例分配。即:

4 甘蔗收割機LUVD控制系統的建模與仿真
根據原理圖和參數數據,利用AMESim仿真軟件對LUDV控制系統進行建模仿真。
選擇AMESim模型庫中元件子模型,對于庫中沒有提供的元件,需要通過HCD(Hy draulic Component Design)庫進行設計,由于甘蔗收割機執行元件比較多,建立完整的模型十分復雜,筆者選擇扶蔗和切削馬達建立模型予以說明。所建系統模型如圖6。
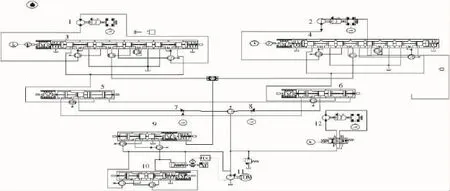
圖6 甘蔗收割機LUDV控制系統仿真模型Fig.6 Simulation model of sugar cane harvester LUDV control system
仿真環境為:介質密度850 kg/m3;體積模量1 700 MPa;動力黏度5.1 ×10-2Pa·s;參考溫度為40℃。
仿真結果得到執行機構流量曲線圖。根據甘蔗收割機工作裝置的工作情況可知,執行機構中扶蔗系統的負載相對于切削系統的要大一些,扶蔗系統所需流量也大一些,如圖7。扶蔗系統流量大約為58 L/min,切削系統流量大約為49 L/min。如果沒有壓力補償閥,切削系統的流量會大于扶蔗系統的流量,因此可以表明壓力補償器可以根據閥開口的大小分配流量,與各執行機構的負載大小無關。當工作裝置負載增大時,如圖8。扶蔗系統流量大約為70 L/min,切削系統流量大約為58 L/min,當3個執行機構同時工作時,所需流量大于變量泵所能提供的最大流量(4 s時開始),此時扶蔗系統和切削系統的流量的都會降低,扶蔗系統流量大約為58 L/min,切削系統流量大約為46 L/min,子系統12分配部分流量大約24 L/min,盡管扶蔗系統和切削系統的負載不同,但由于壓力補償器的作用,兩系統流量成比例減少,使甘蔗收割機工作裝置的執行機構仍舊能夠很好的協調工作。
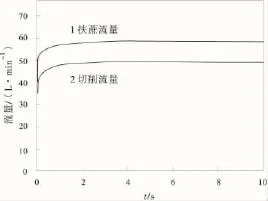
圖7 系統流量仿真曲線Fig.7 Simulation curve of the system flow
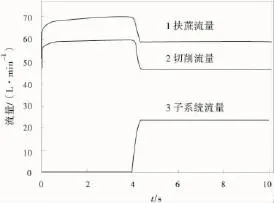
圖8 流量飽和時,系統流量仿真曲線Fig.8 Flow simulation curve when the flow is saturated
5 結語
介紹了甘蔗收割機的類型,設計出符合我國西南丘陵地區的小型整桿式甘蔗收割機的液壓系統。閉式行走系統主要由變量泵和兩點控制變量馬達組成,分析了DA控制的原理和優勢,符合甘蔗收割機對行走速度穩定性的要求。開式工作裝置液壓系統采用LUDV負荷傳感控制系統,能減少液壓系統的能量損失,到達節能的目的;當系統流量達到飽和時,可根據各個回路的節流閥開口的大小將流量按比例減低,而與壓差沒有關系,使甘蔗收割機各執行機構能夠正常的協調工作,利用AMESim軟件進行建模仿真,結果表明該系統符合機器的工作要求,并對類似產品的改進和研發具有一定的參考價值。
[1]陳遠玲,梁式,李尚平,等.甘蔗聯合收割機及其液壓技術的應用[J].流體傳動與控制,2005,10(3):19-20.Chen Yuanling,Liang Shi,Li Shangping,et al.Sugarcane harvester and its applications of hydraulic technology[J].Fluid Power Transmission and Control,2005,10(3):19-20.
[2]蔣占四,李尚平,鄧勁蓮.甘蔗收割機智能設計系統的研究開發[J].計算機輔助設計與圖形學學報,2004,16(12):1754-1757.Jiang Zhansi,Li Shangping,Deng Jinlian.Knowledge based intelligent design system for sugarcane harvester[J].Journal of Computer Aided Design & Computer Graphics,2004,16(12):1754-1757.
[3]蒙艷玫,李尚平,劉正士,等.甘蔗收獲機械關鍵元件動態試驗測試的分析研究[J].廣西大學學報,2004,29(3):222-225.Meng Yanmei,Li Shangping,Liu Zhengshi,et al.Dynamic test research on cleaning element in brush shape for sugarcane harvester[J].Journal of Guangxi University,2004,29(3):222-225.
[4]姚懷新.行走機械液壓傳動與控制[M].北京:人民交通出版社,2002.Yao Huaixin.Walking Mechanical Hydraulic Drive and Control[M].Beijing:China Communications Press,2002.
[5]陳遠玲,付玉林.基于AMESim的甘蔗聯合收割機多執行器系統分流技術仿真研究[J].液壓與氣動,2008,31(12):6-9.Chen Yuanling,Fu Yulin.Simulating of flow-shunt technology for multi-actuators in the sugarcane combine harvester using AMESim[J].Hydraulics& Pneumatic,2008,31(12):6-9.
[6]吳曉光,宋海濤,殷新勝,等.基于AMESim的鉆機負載敏感液壓系統仿真分析[J].機床與液壓,2008,36(3):163-165.Wu Xiaoguang,Song Haitao,Yin Xinsheng,et al.Simulation analysis of drilling load sensing system based on AMESim[J].Machine Tool& Hydraulics,2008,36(3):163-165.
[7]鄧斌,劉恒龍,于蘭英,等.裝載機變量液壓節能技術[J].建筑機械,2004(9):80-82.Deng Bin,Liu Henglong,Yu Lanying.Variable hydraulic energysaving technology of loader[J].Construction Machinery,2004(9):80-82.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
