基于CTD的浮力補(bǔ)償系統(tǒng)研究
2013-08-18 06:02:40盧海洋
機(jī)電工程技術(shù) 2013年1期
盧海洋,查 智
(中國(guó)船舶重工第七一〇研究所,湖北 宜昌 443003)
0 引言
21世紀(jì)是海洋的世紀(jì),在廣闊無(wú)垠的海洋空間,蘊(yùn)藏著豐富的海洋生物資源、海洋礦物資源,是人類社會(huì)可持續(xù)發(fā)展的重要財(cái)富。水下機(jī)器人在海洋資源勘探和開(kāi)發(fā)中的應(yīng)用越來(lái)越廣泛,也發(fā)揮著重要的作用,具有廣泛的應(yīng)用前景。對(duì)于大型或重型UUV運(yùn)載平臺(tái),其在無(wú)人干預(yù)遠(yuǎn)程自主航行過(guò)程中,由于所處外部環(huán)境海水溫度、鹽度、深度的變化會(huì)引起海水密度的變化,導(dǎo)致UUV的浮力發(fā)生變化,對(duì)UUV的航行控制產(chǎn)生不利的影響,需要進(jìn)行浮力補(bǔ)償。如果不對(duì)這種浮力變化作出補(bǔ)償則會(huì)使UUV可能沉入海底或浮于水面,影響作業(yè)任務(wù)的完成[1]。
1 水下航行器浮力補(bǔ)償發(fā)展現(xiàn)狀
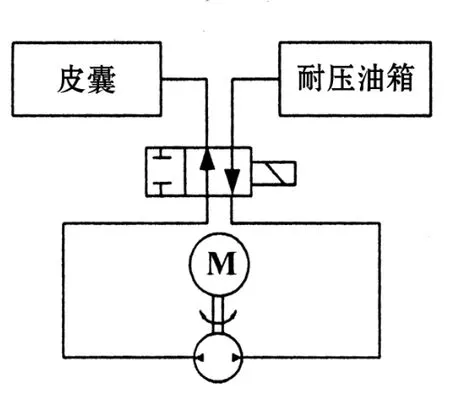
圖1 油介質(zhì)型原理圖
通常,物體在水中實(shí)現(xiàn)沉浮動(dòng)作通常有三種途徑:1)改變物體的體積而不改變質(zhì)量;2)改變物體的質(zhì)量而不改變體積;3)增加或減少所施加的外力,第一種和第二種方案的典型工作原理分別如圖1、圖2所示。第一種方案主要通過(guò)向皮囊中注/排油的方式來(lái)改變其體積大小,從而實(shí)現(xiàn)浮力調(diào)節(jié);第二種方案是通過(guò)向水艙中注/排水的方式來(lái)改變航行體質(zhì)量來(lái)實(shí)現(xiàn)浮力調(diào)節(jié);第三種方案是通過(guò)航行體自身的動(dòng)力裝置來(lái)施加一個(gè)外力,從而實(shí)現(xiàn)浮力平衡作用[2-3]。

圖2 水介質(zhì)型原理圖
綜上所述,第一種方案,需要在UUV內(nèi)部存貯相當(dāng)數(shù)量的液壓油,由于UUV內(nèi)部空間有限,采用此種方法將占用大量的空間,不利于UUV的整體設(shè)計(jì)。第三種方案,需要UUV自身攜帶的動(dòng)力裝置來(lái)實(shí)現(xiàn)浮力的平衡,將消耗過(guò)多的能量,而UUV在水下航行時(shí),所攜帶的能量是有限的。根據(jù)本文的研究背景,故采用第二種方案實(shí)現(xiàn)UUV的浮力調(diào)節(jié)功能[4-5]。
2 浮力補(bǔ)償系統(tǒng)在UUV中的應(yīng)用
2.1 系統(tǒng)的研究意義
隨著水下機(jī)器人技術(shù)不斷發(fā)展和成熟,其在民用領(lǐng)域和軍用領(lǐng)域都將有越來(lái)越多的應(yīng)用。近年來(lái),以UUV為代表的各種無(wú)人作戰(zhàn)平臺(tái)在現(xiàn)代戰(zhàn)爭(zhēng)中扮演著重要的角色,成為兵力的倍增器,這一趨勢(shì)大大促進(jìn)了人們對(duì)UUV技術(shù)的研究和應(yīng)用。根據(jù)美國(guó)海軍發(fā)布的無(wú)人潛航器(UUV)總體規(guī)劃,待發(fā)展的UUV根據(jù)尺寸和重量分為便攜式航行器、輕型航行器、重型航行器、大型航行器四類,本文研究的浮力補(bǔ)償系統(tǒng),主要針對(duì)重型或大型航行器,解決其在遠(yuǎn)程航行過(guò)程中的浮力補(bǔ)償問(wèn)題[6]。
下面以中國(guó)南海11月份海水密度分布圖為例,分析UUV航行過(guò)程中浮力變化情況[7]。
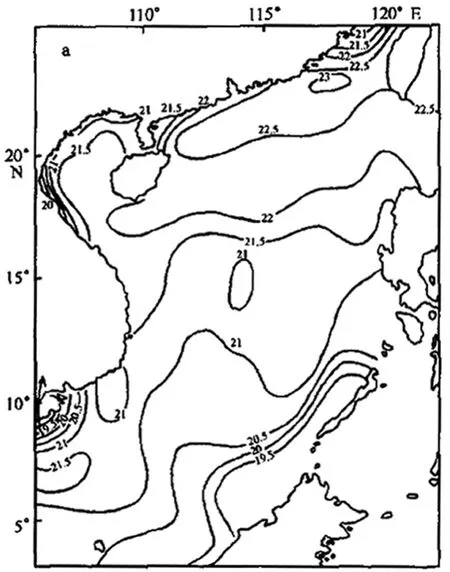
圖3 11月份南海表層密度分布圖(多年平均)
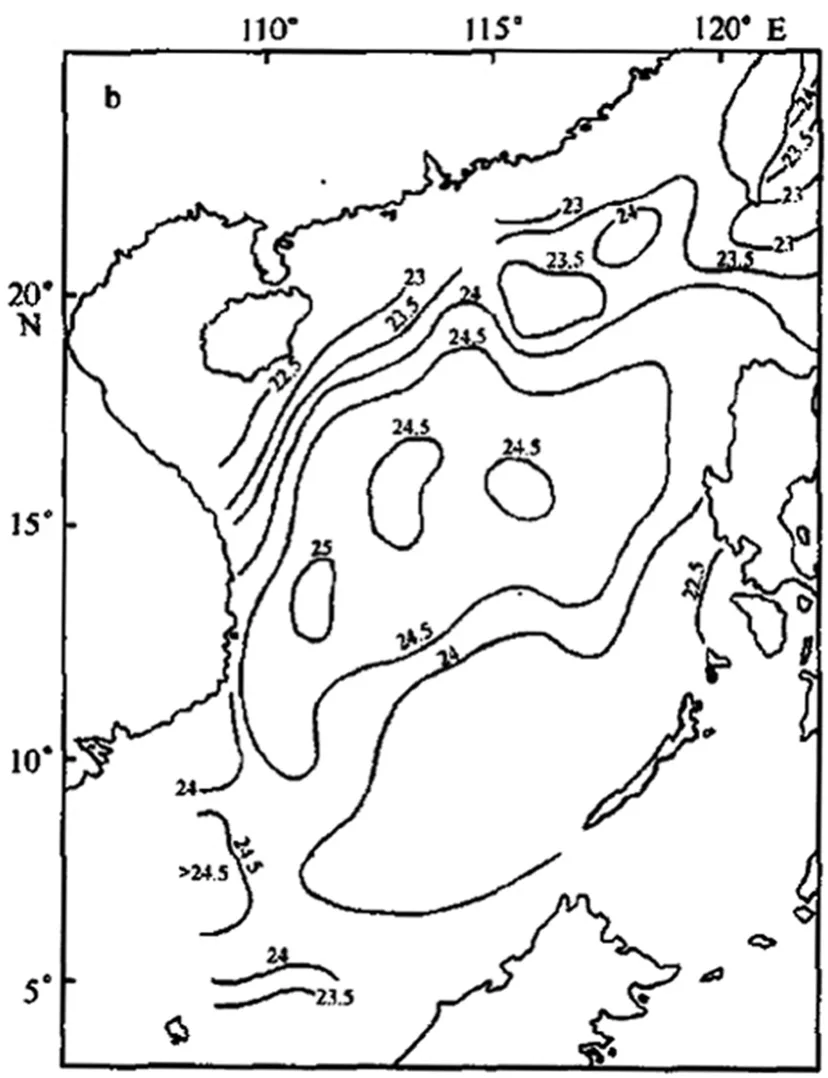
圖4 11月份南海100 m層密度分布圖(多年平均)
11月份南海表層海水密度變化范圍基本在1.020~1.022 g/cm3之間,局部地區(qū)大于1.022 g/cm3但是小于1.0225 g/cm3,如圖3所示(圖中標(biāo)示的是現(xiàn)場(chǎng)條件密度)。11月份南海100 m層海水密度變化范圍基本在1.022~1.024 g/cm3之間,局部地區(qū)大于1.024 g/cm3但是小于1.0245 g/cm3,如圖4所示(圖4中標(biāo)示的是現(xiàn)場(chǎng)條件密度)。則在此海域內(nèi),0~100 m深度范圍內(nèi),海水密度最大變化量約為0.0045 g/cm3。
如果不考慮碼頭附近由于淡水的注入密度遠(yuǎn)遠(yuǎn)小于外海,按UUV排水量從小到大,依次計(jì)算其浮力變化值如表1所示。
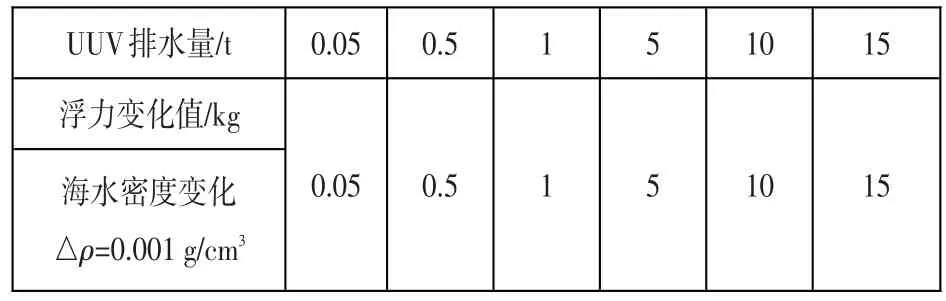
表1 浮力變化值
由表1可知,若UUV排水量為10 t,海水密度變化為0.002 g/cm3時(shí),UUV需要調(diào)節(jié)的浮力值為196 N。在南海航行時(shí),UUV需要調(diào)節(jié)的浮力值為441 N,不管其為正浮力或負(fù)浮力,都將給UUV航行和安全帶來(lái)災(zāi)難性的影響,所以必須對(duì)UUV的浮力變化采取相應(yīng)的補(bǔ)償措施。
2.2 系統(tǒng)組成
浮力補(bǔ)償水艙、調(diào)節(jié)裝置和控制器在UUV中的位置如圖5所示,在UUV的艏、艉段分別布置一個(gè)水艙,保證進(jìn)行浮力補(bǔ)償時(shí)力矩平衡的作用。調(diào)節(jié)裝置和控制器布置在水艙旁的空艙內(nèi),浮力補(bǔ)償控制器采用主從方式,主控制器從UUV中央控制器接收指令,然后再分別向兩個(gè)從控制器發(fā)送控制指令,從而實(shí)現(xiàn)UUV的浮力補(bǔ)償[8]。
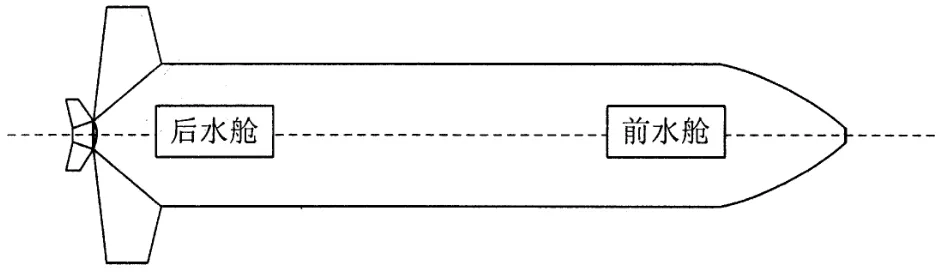
圖5 水艙位置圖
UUV浮力補(bǔ)償原理框圖如圖6所示,UUV在航行過(guò)程中,需要進(jìn)行浮力補(bǔ)償時(shí),浮力補(bǔ)償控制器根據(jù)當(dāng)前海水密度和初始海水密度進(jìn)行比較,計(jì)算其浮力變化值,然后對(duì)AUV前后水艙進(jìn)行浮力分配,通過(guò)浮力調(diào)節(jié)裝置注/排水的方式實(shí)現(xiàn)UUV的浮力補(bǔ)償。
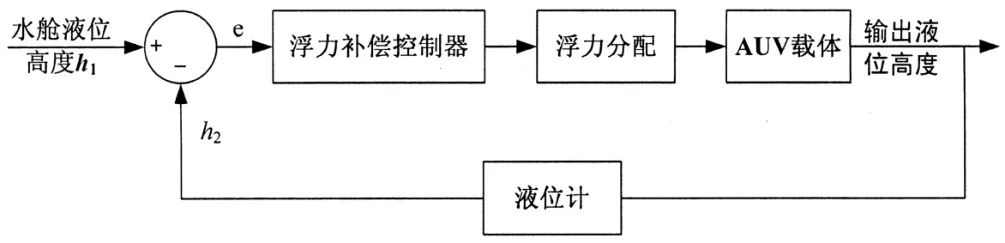
圖6 浮力補(bǔ)償原理框圖
浮力補(bǔ)償系統(tǒng)主要由浮力補(bǔ)償控制器、液位傳感器、浮力調(diào)節(jié)裝置和CTD傳感器等幾部分組成。浮力補(bǔ)償控制器根據(jù)CTD傳感器提供的海水溫度、鹽度、深度信息,通過(guò)海水狀態(tài)方程公式進(jìn)行計(jì)算,得出當(dāng)前UUV所處環(huán)境的海水密度。浮力補(bǔ)償控制器運(yùn)用適當(dāng)?shù)乃惴ǎㄟ^(guò)浮力調(diào)節(jié)裝置向UUV艙內(nèi)注/排水的方式來(lái)改變UUV自身的質(zhì)量,從而達(dá)到浮力補(bǔ)償?shù)哪康模到y(tǒng)原理框圖如圖7所示[9]。
3 基于CTD的浮力補(bǔ)償原理
3.1 浮力補(bǔ)償原理
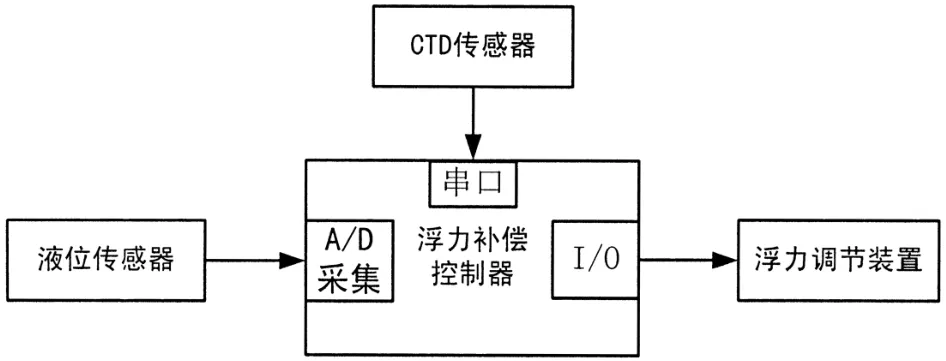
圖7 浮力補(bǔ)償系統(tǒng)原理框圖
由阿基米德原理可知,當(dāng)一個(gè)物體全部浸在水中且處于平衡狀態(tài)時(shí),流體作用在此物體上力的大小等于被此物體排開(kāi)的水的重力,方向與重力相反,由于本文是研究UUV在水下航行的過(guò)程,所以其受到的浮力為[10]:

對(duì)于UUV在水下航行過(guò)程中,由于UUV所處外部環(huán)境海水密度變化所導(dǎo)致的浮力變化計(jì)算公式推導(dǎo)如下:

將式(2)與式(3)相除,得:

所以,UUV航行過(guò)程中由于海水密度變化導(dǎo)致浮力變化計(jì)算公式為:

式(5)中:ΔF表示浮力變化值;
Δρ表示海水密度的變化值;
ρ0表示淡水的密度;
m0表示UUV質(zhì)量。
3.2 海水密度計(jì)算
海水密度是研究海洋學(xué)的一個(gè)重要參數(shù),海水密度不僅與海水的溫度、壓力和鹽度有關(guān),而且還和純水的密度有關(guān)。本文根據(jù)80國(guó)際海水狀態(tài)方程(IESS-80)計(jì)算UUV所處環(huán)境海水密度,具體流程如圖8所示[11]。
浮力補(bǔ)償算法軟件流程圖如圖9所示。具體執(zhí)行過(guò)程如下:浮力補(bǔ)償算法根據(jù)CTD采集到的數(shù)據(jù)計(jì)算海水密度,并根據(jù)當(dāng)前密度值與初始值之間的變化量Δρ與e1進(jìn)行比較。當(dāng)Δρ≥e1時(shí),需要進(jìn)行浮力調(diào)節(jié),并計(jì)算需要補(bǔ)償?shù)母×χ担?qū)動(dòng)浮力調(diào)節(jié)裝置工作,以實(shí)現(xiàn)浮力自適應(yīng)之功能,浮力調(diào)節(jié)完成后將初始密度值置為當(dāng)前密度值,即 ρ0=ρ1。當(dāng)Δρ<e1時(shí),不需要進(jìn)行浮力調(diào)節(jié)。
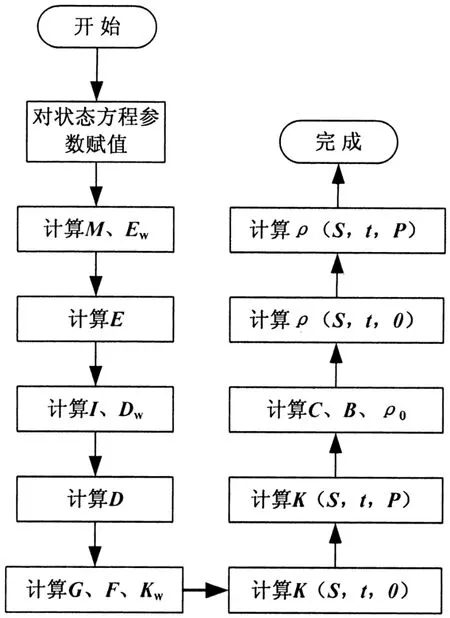
圖8 海水密度計(jì)算軟件流程
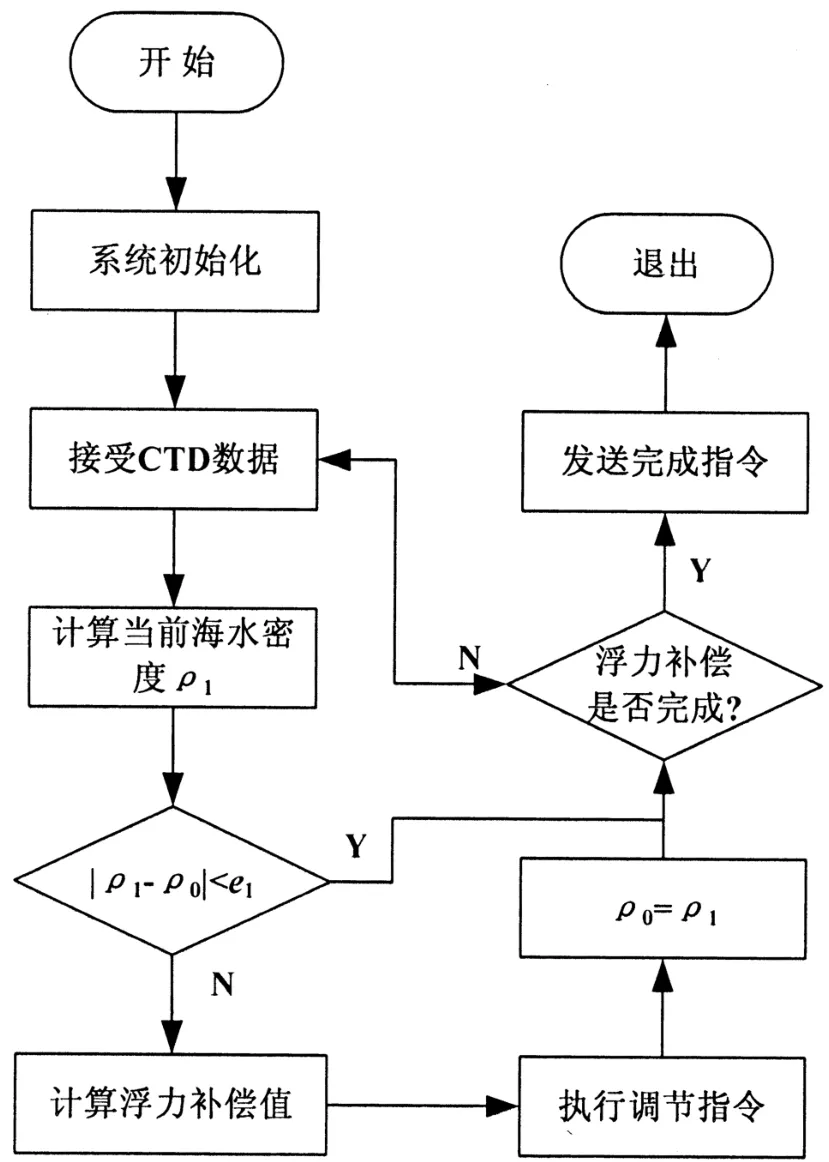
圖9 浮力補(bǔ)償算法軟件流程
3.3 仿真結(jié)果分析
本文對(duì)浮力補(bǔ)償算法進(jìn)行半實(shí)物仿真分析,CTD采集的海水溫度、鹽度、深度數(shù)據(jù)用計(jì)算機(jī)模擬輸入,計(jì)算出當(dāng)前海水密度ρ1,與初始海水密度 ρ0進(jìn)行比較,當(dāng) Δρ=|ρ1-ρ0|≥e1時(shí),進(jìn)行浮力補(bǔ)償, Δρ=|ρ1-ρ0|<e1時(shí),不進(jìn)行浮力補(bǔ)償。根據(jù)實(shí)際使用情況,本文取e1=1 kg/m3,UUV排水量V排=15 t,海水泵的流量Q=20 L/min。
根據(jù)UUV進(jìn)行浮力補(bǔ)償時(shí)的實(shí)際應(yīng)用情況,下面分別從Δρ<e1、Δρ≥e1兩種情況進(jìn)行仿真分析。因?yàn)樵赨UV航行過(guò)程中,海水鹽度、溫度變化,對(duì)海水密度影響較大,所以在本文仿真試驗(yàn)中主要改變海水鹽度和溫度。UUV在航行過(guò)程中,假設(shè)溫度、鹽度、深度變化情況如表2所示,UUV航行深度用壓強(qiáng)表示。
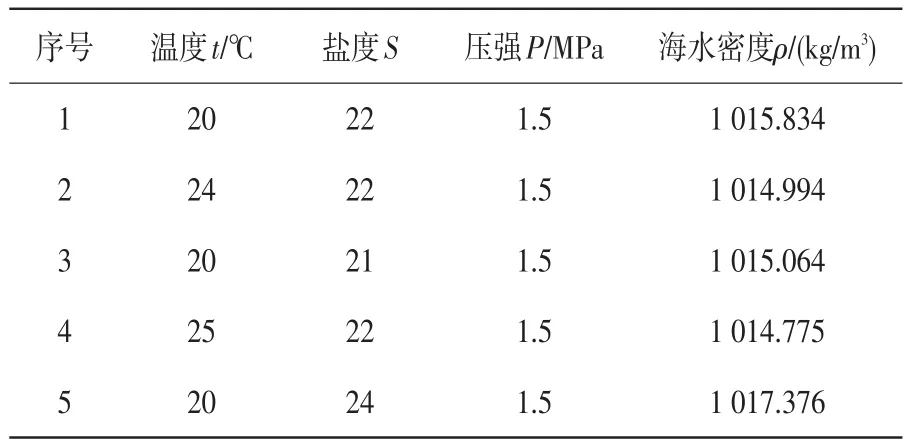
表2 海水密度計(jì)算值
從表2可知,當(dāng)溫度變化Δt=4℃或鹽度變化ΔS=1時(shí),對(duì)應(yīng)表中序號(hào)分別為1和2、1和3,則海水密度變化分別為 Δρ=0.84 kg/m3<e1、Δρ=0.77 kg/m3<e1,水艙中水的體積仿真變化曲線如圖10、圖11所示。
當(dāng)溫度變化Δt=5℃或鹽度變化ΔS=2時(shí),對(duì)應(yīng)表中序號(hào)分別為1和4、1和5,則海水密度變化分別為Δρ=1.059 kg/m3>e1、Δρ=1.542 kg/m3>e1。為了便于對(duì)比分析,仿真時(shí)將海水密度先由 ρ0增大 ρ1,再由 ρ1減小為 ρ0,看注入水量和排出水量是否相同,水艙中水的體積仿真變化曲線如圖12、圖13所示。
從圖10~圖13可知,當(dāng)海水密度變化Δρ<e1=1 kg/m3時(shí),浮力自適應(yīng)控制系統(tǒng)沒(méi)有進(jìn)行浮力補(bǔ)償工作;當(dāng)海水密度變化Δρ≥e1=1 kg/m3時(shí),海水密度先由 ρ0增大到 ρ1,再由 ρ1減小為 ρ0,浮力自適應(yīng)控制系統(tǒng)進(jìn)行浮力補(bǔ)償工作,并完成相應(yīng)注排水工作,注入和排出水量相同,實(shí)現(xiàn)浮力補(bǔ)償功能。
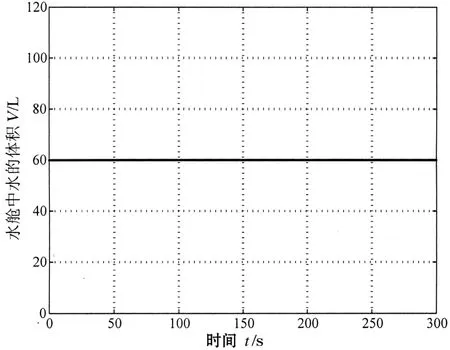
圖10 溫度變化Δt=4℃
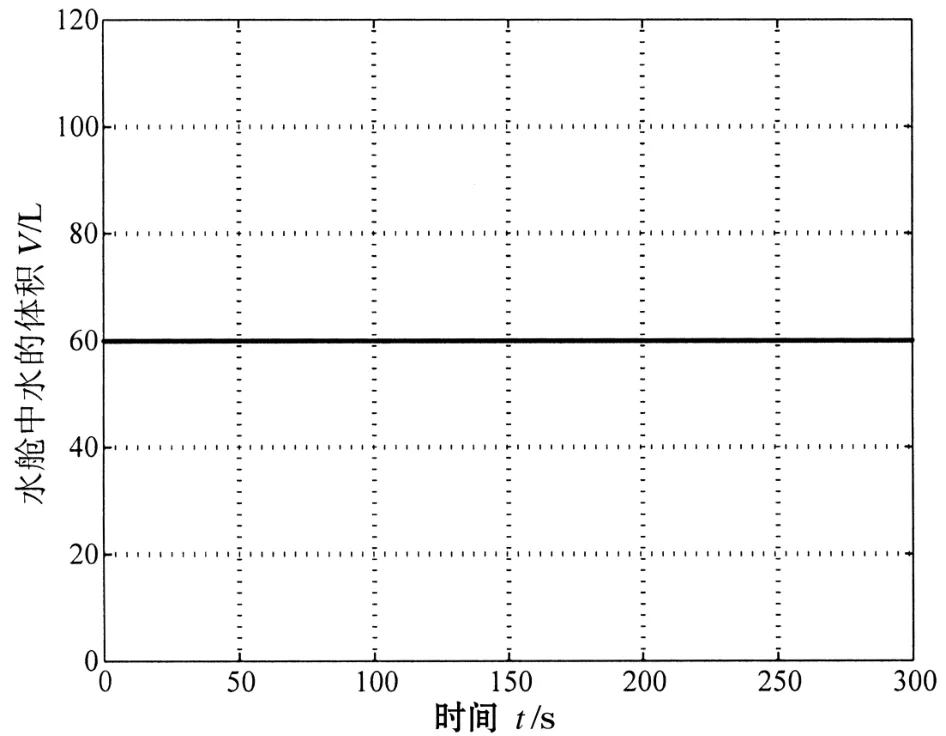
圖11 鹽度變化ΔS=1

圖12 溫度變化Δt=5℃
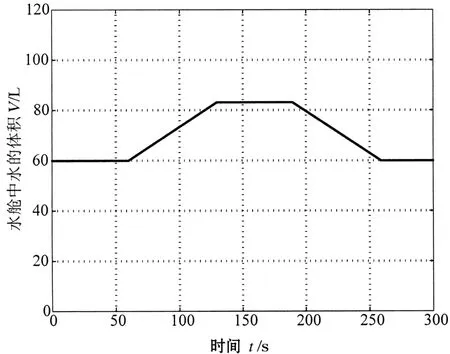
圖13 鹽度變化ΔS=2
4 結(jié)論
本文針對(duì)重型、大型UUV在遠(yuǎn)程航行過(guò)程的浮力補(bǔ)償問(wèn)題進(jìn)行研究,設(shè)計(jì)了一種基于CTD的浮力自動(dòng)補(bǔ)償系統(tǒng),有效地解決了UUV在航行過(guò)程中浮力補(bǔ)償問(wèn)題,為今后重型、大型UUV運(yùn)載體的應(yīng)用奠定了關(guān)鍵的技術(shù)基礎(chǔ)。
[1]陳強(qiáng),張林根.美國(guó)軍用UUV現(xiàn)狀及發(fā)展趨勢(shì)分析[J].艦船科學(xué)技術(shù),2010,32(7):129-134.
[2]錢(qián)東,孟慶國(guó),薛蒙,等.美國(guó)海軍UUV的任務(wù)與能力需求[J].魚(yú)雷技術(shù),2005,13(4):7-13.
[3]蘇紀(jì)蘭,袁業(yè)立.中國(guó)近海水文[M].北京:海洋出版社,2005.
[4]鄭榮,常海龍.浮力調(diào)節(jié)系統(tǒng)在作業(yè)型AUV上的應(yīng)用研 究 [J].微 計(jì) 算 機(jī) 信 息 ,2006, 22 (9-2):207-208.
[5]楊鋼,郭晨冰,李寶仁.浮力調(diào)節(jié)裝置實(shí)驗(yàn)研究[J].機(jī)床與液壓,2008,36(10):52-53.
[6]嚴(yán)安慶,方學(xué)紅,楊邦清.淺談潛水器浮力調(diào)節(jié)系統(tǒng)的研究現(xiàn)狀[J].水雷戰(zhàn)與艦船防護(hù),2009,17(2):55-59.
[7]邱中梁,冷建興,陳建國(guó),等.深海載人潛水器可調(diào)壓載系統(tǒng)研究[J].液壓與氣動(dòng),2003(11):9-11.
[8]盧海洋,林平.基于模糊PID控制的UUV定深控制系統(tǒng)設(shè)計(jì)[J].重慶理工大學(xué)學(xué)報(bào),2011,25(214):58-62.
[9]趙文德,李建朋.基于浮力調(diào)節(jié)的AUV升沉運(yùn)動(dòng)控制技術(shù)[J].南京航空航天大學(xué)學(xué)報(bào),2010,42(4):411-417.
[10]王恩華.阿基米德原理教學(xué)案例[J].物理教學(xué)討論,2007,25(295):17-18.
[11]姚勇,衛(wèi)薇,陳華秋.90國(guó)際溫標(biāo)對(duì)80國(guó)際海水狀態(tài)方程影響的研究[J].海洋技術(shù),2001,20(3):74-78.