基于VB和PRO/E的凸輪機構三維參數化建模和運動仿真分析
2013-08-22 07:34:52馮立艷劉迎娟謝文志
制造業自動化 2013年4期
關鍵詞:模型
馮立艷,劉迎娟,謝文志,周 雪
(河北聯合大學 機械工程學院,唐山 063009)
0 引言
凸輪機構具有結構簡單、緊湊、設計方便和易實現預期運動等特點,因而在各種自動機械中都有著廣泛的應用。
凸輪可分為盤形凸輪(溝槽式和平板式)、移動凸輪、圓柱或圓錐凸輪(溝槽式和端面式)等幾種常見類型,從動件有直動和擺動兩種運動形式,從動件的端部結構有尖頂、滾子、平底、球面等。從動件的運動過程一般包括推程、遠休止、回程和近休止四個階段,從動件在推程、回程常見的運動規律有等速運動、等加速等減速運動、擺線運動、簡諧運動、五次多項式運動等。從動件的運動規律決定了凸輪的廓線形狀,利用三維設計軟件設計凸輪時,既要考慮從動件的運動規律,又要考慮各基本參數對凸輪輪廓的影響,這正是凸輪參數化三維建模的意義所在。
雖然Pro/E中的program能實現凸輪參數化三維建模,但整個建模過程不能脫離Pro/E軟件,給操作帶來諸多不便,故本文利用VB開發獨立的程序界面,將輸入值賦給AGW,再由AGW驅動Pro/E的自變量參數,即可生成新凸輪模型;將凸輪機構中的各參數和機構中零件的對應參數關聯起來,自動實現尺寸驅動,生成新凸輪機構的三維模型。這種方法操作簡便,效率高。基于VB和Pro/E的凸輪機構三維參數化建模和運動仿真分析的過程如圖1所示。
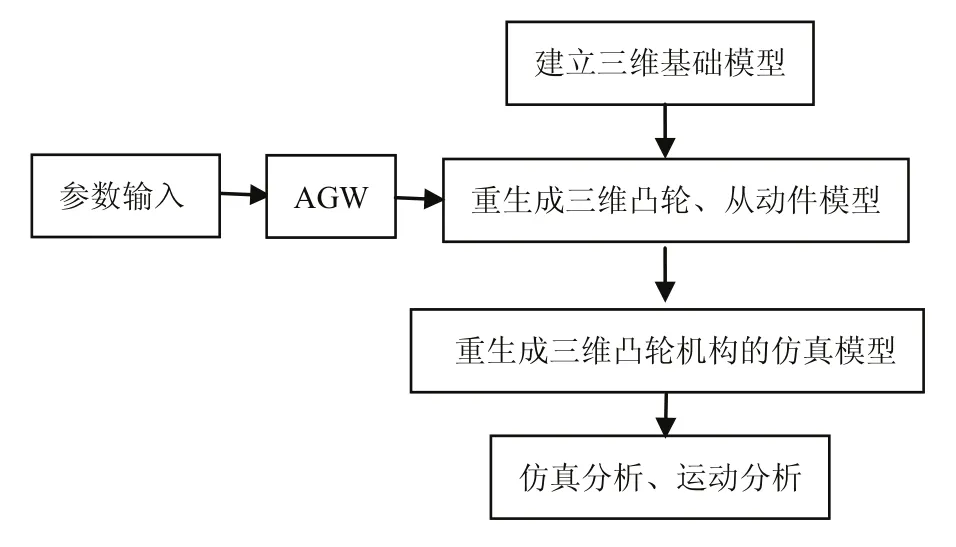
圖1 凸輪機構三維參數化建模和運動仿真分析流程
1 凸輪的三維參數化建模
不同種類的凸輪需要的基本參數不同,現以偏置直動滾子從動件盤形凸輪機構為例,說明建模過程。
1.1 三維基礎模型的建立
1.1.1 基本參數的設置
啟動Pro/E環境,選擇【工具/程序】命令,在INPUT和END INPUT語句中間輸入圖2所示的語句,存盤后,輸入各參數初值。基本參數及程序中對應的變量代號如表1所列,其中的初始值任意給定,但要保證推程角、遠休角、回程角、近休角之和為360°。

表1 凸輪機構基本參數的名稱、變量及初始值
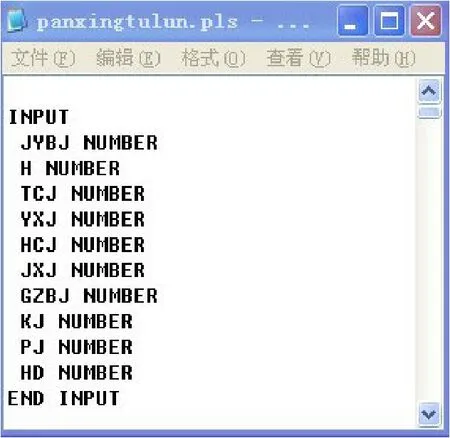
圖2 自變量的名稱及類型
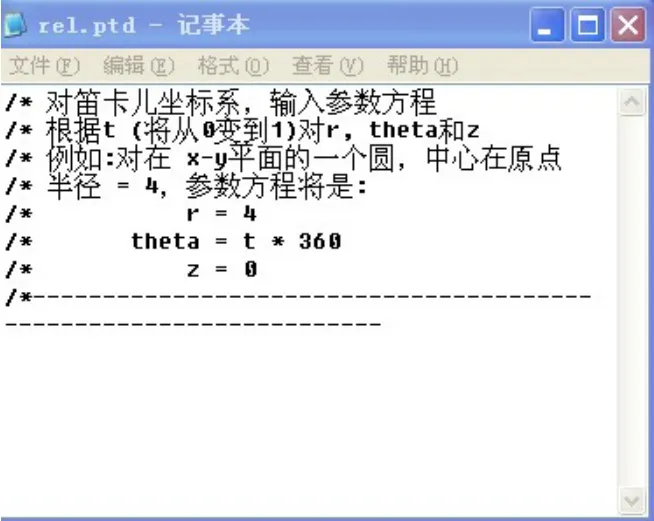
圖3 凸輪廓線數學表達式的輸入
1.1.2 凸輪廓線的創建
選擇【插入/模型基準曲線】命令,選取【從方程】選項后,再單擊【完成】選項,選擇系統默認坐標系PRT-CSYS-DEF,選擇坐標類型為圓柱坐標(r,theat,z),單擊【確定】則系統自動彈出圖3所示記事本應用程序,在其下面輸入推程段凸輪理論廓線的數學表達式,如式(1),然后保存,退出記事本應用程序,就完成了推程段凸輪廓線如圖4所示。
theta1=TCJ×t
r0=sqrt(JYBJ×JYBJ-PJ×PJ)
r1=r0+S1 (1)
theta=theta1+atan(PJ/r0)
r=sqrt(PJ×PJ+r1×r1)
z=0
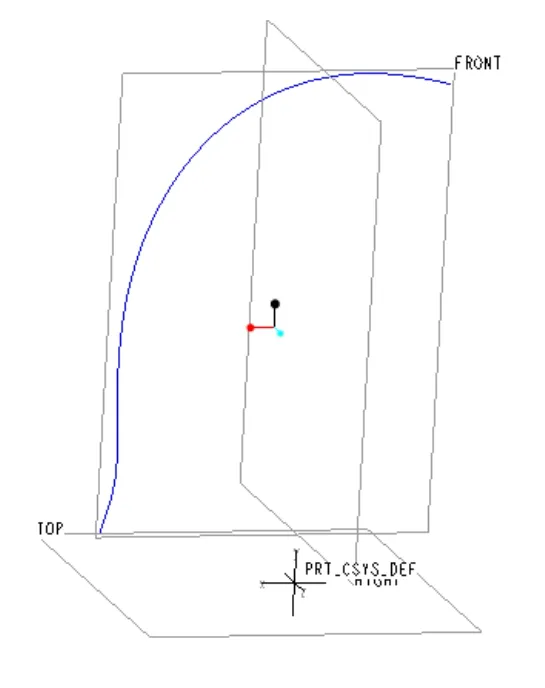
圖4 推程段凸輪廓線
式(1)中的S1是推程的位移,若從動件推程為正弦加速度運動規律,則其推程運動方程為:S1=H×(t-sin(360×t)/2/pi)
改變式(1)中的theta1和S1(如遠休止時theta1=TCJ+YXJ×t ,S1=H),其余不變,即可繪制凸輪其他三段(遠休止、回程、近休止)的輪廓曲線,曲線繪制完成后凸輪的理論廓線如圖5所示。
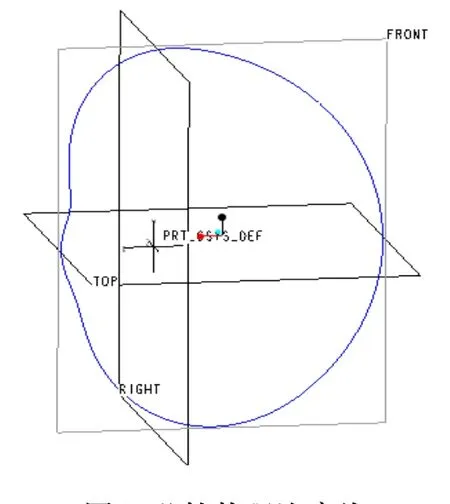
圖5 凸輪的理論廓線
1.1.3 三維基礎模型的生成
單擊工具欄中的拉伸按鈕,按凸輪的厚度拉伸理論廓線,就完成了凸輪理論廓線的實體建模;掃描一個與凸輪理論廓線相距為滾子半徑的曲線,并向外拉伸,得到凸輪的實際輪廓曲面;點擊拉伸,點擊去除材料創建凸輪中心孔,完成與表1中的各初始值相對應的三維凸輪基礎模型,如圖6所示。
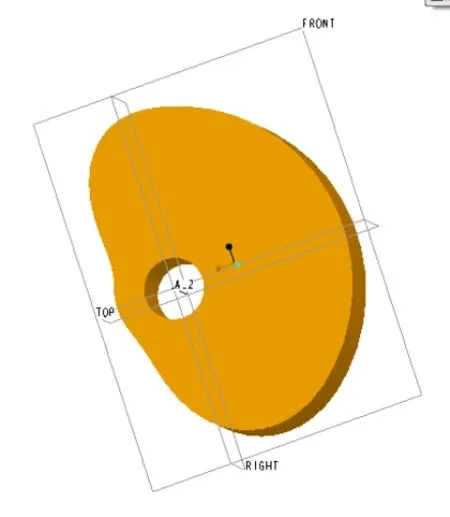
圖6 凸輪的三維基礎模型
1.2 新三維模型的生成
改變參數即可生成對應參數的凸輪三維模型。
如圖7所示,運行VB程序,輸入各參數,點擊“確定參數”按鈕,即可把輸入的值通過AGW賦給Pro/E基礎模型中的各變量,實現VB和Pro/E的連接,VB源程序如下:
Public gateway1 As New GWayAX ;'在VB的通用中添加
Dim JYBJ,H,TCJ,YXJ,HCJ,JXJ,GZBJ,KJ,PJ,HD As Single
Private Sub Command1_Click() '單擊“確定參數”按鈕對應的程序代碼
Dim newwindow As EnumBool
modelName =" "& App.Path & " gbcs.asm"
newwindow = YES
gateway1.ModelRetrieve (modelName)
fb = gateway1.SessionSetCurrentModel(modelN ame, newwindow)
JYBJ = gateway1.ParamSetValue("JYBJ",Form1.Text1.Text)
H = gateway1.ParamSetValue("H", Form1.Text2.Text)
TCJ = gateway1.ParamSetValue("TCJ", Form1.Text3.Text)
YXJ = gateway1.ParamSetValue("YXJ", Form1.Text4.Text)
HCJ = gateway1.ParamSetValue("HCJ", Form1.Text5.Text)
JXJ = gateway1.ParamSetValue("JXJ", Form1.Text6.Text)
GZBJ = gateway1.ParamSetValue("GZBJ",Form1.Text7.Text)
KJ = gateway1.ParamSetValue("KJ", Form1.Text8.Text)
PJ = gateway1.ParamSetValue("PJ", Form1.Text9.Text)
HD = gateway1.ParamSetValue("HD", Form1.Text10.Text)
gateway1.ModelRegenerate '模型再生
End Sub
改變輸入參數,立即生成凸輪的三維模型,生成的新凸輪如圖8所示。
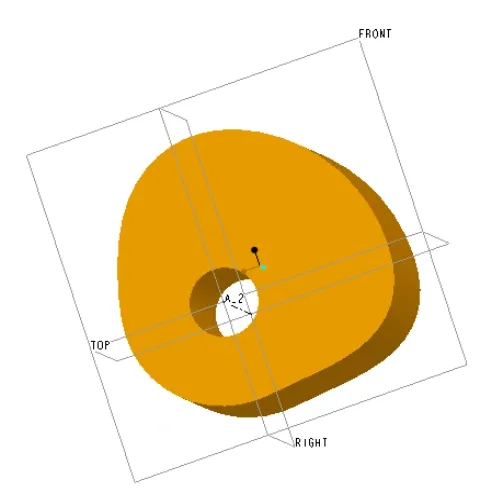
圖8 與圖7中參數對應的再生凸輪
2 凸輪機構的三維參數化建模方法
凸輪機構的參數化建模是將凸輪機構中各零件分別建立三維參數化模型,并使其相關參數關聯起來,用參數化尺寸驅動整個凸輪機構。除了上述凸輪外,再分別建立滾子直動從動件盤形凸輪機構的機架、推桿、滾子、聯接用銷釘的三維參數化模型,分別調入各零件模型,將它們裝配成凸輪機構tulunjigou.asm。
設置tulunjigou.asm的各參數,在RELATION和END RELATION之間輸入如下語句:
EXECUTE PART GUNZI;
GZBJ = GZBJ
HD = HD
END EXECUTE
退出并保存,即完成了裝配圖中的參數與零件名稱為GUNZI的滾子半徑(GZBJ)和厚度(HD)的尺寸關聯,逐一添加凸輪機構與機架、推桿、凸輪、銷釘的各尺寸參數的關聯,進而實現整個凸輪機構的參數化,與圖7參數對應的凸輪機構如圖9所示。
3 凸輪機構的運動仿真及運動分析
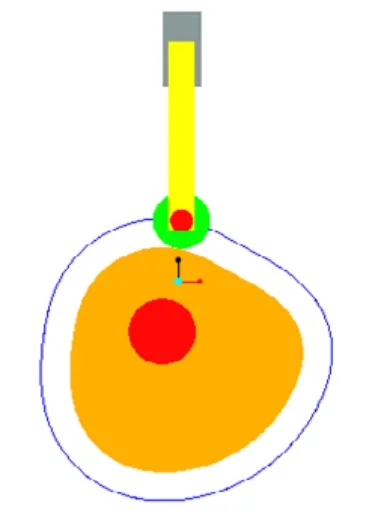
圖9 凸輪機構的動態仿真
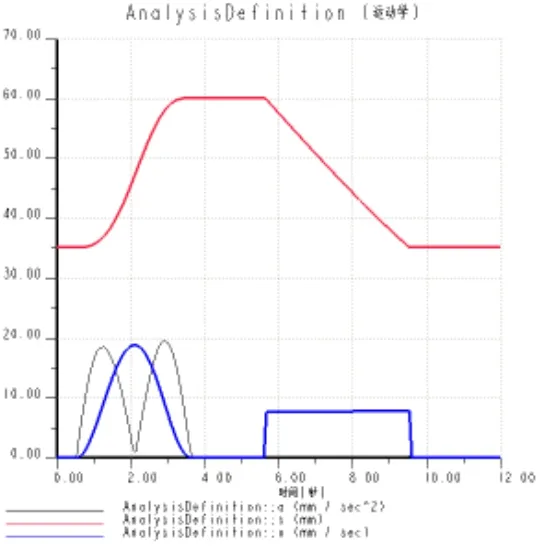
圖10 一個周期內位移、速度、加速度與時間的關系曲線
利用Pro/E應用程序中的機構模塊對凸輪機構進行運動學仿真和分析,設置凸輪的轉動角速度為50度/秒。分別點擊圖7的“動態仿真”、“位移分析”、“速度分析”、“加速度分析”按鈕,得到動態仿真過程,如圖9所示,運轉一周(12秒)的位移、速度、加速度分析結果如圖10所示。圖中,從動件推程作等加速等減速運動,回程作等速運動。
4 結束語
本文利用AGW實現了Pro/E和VB的數據傳遞,相比于使用Pro/E中的program更改參數,可操作性更強,設計者不必熟悉Pro/E軟件即可完成凸輪的設計計算、三維實體建模、運動仿真及運動分析,大大地提高了設計的質量和效率。設計出的凸輪三維實體模型,可用于凸輪的設計、分析、數控加工等。本文的設計方法完全適應于其他類型的凸輪及凸輪機構。
[1] 黃愷,李雷,等.Pro/E參數化設計高級應用教程[M].北京:化學工業出版社,2008.
[2] 劉圣才,李春葆.Visual Basic 程序設計題典[M].北京:清華大學出版社,2002.
[3] 張繼春. Pro/ENGINEER二次開發實用教程[M].北京:北京大學出版社,2003.
[4] 郭玉華.基于Pro/E的等加速等減速凸輪三維模型設計[J].煤礦機械, 2007, 28(6).
[5] 張友湖,夏秋華.基于Pro/E的圓錐凸輪機構參數化設計及運動仿真[J].機械傳動,2011, 35 (1):31-33.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
