基于Adams的駝峰解體自動摘鉤裝置運動軌跡與仿真
2013-08-22 07:34:48王戰中劉超穎楊長建
制造業自動化 2013年1期
關鍵詞:動作
王戰中,趙 賽,劉超穎,楊長建,熊 蒙
(石家莊鐵道大學,石家莊 050043)
0 引言
隨著我國編組站駝峰自動化進程的飛速提升,駝峰解體自動摘鉤越來越引起專家學者的重視[1]。之所以自動摘鉤會成為制約駝峰自動化乃至編組站全面自動化的瓶頸,主要原因如下:
1)待摘車鉤為移動目標,定位困難;
2)摘鉤環境復雜,工況條件惡劣;
3)待解列車車型多樣化,造成摘鉤點難以控制。
上述原因決定了自動摘鉤實現的難易程度。本文結合人工摘鉤的動作過程,設計出一種懸掛式駝峰自動摘鉤裝置,并應用Adams軟件對其進行了運動學仿真。
1 駝峰自動摘鉤裝置工作原理
1.1 駝峰自動摘鉤裝置簡介
該駝峰自動摘鉤裝置結構是根據工廠車間橋式起重機的布局方案而設計[2],裝置支架4橫架于貨車上空,由于其末端執行器懸垂而下,故稱該裝置為懸掛式自動摘鉤裝置。在高架上鋪設行走軌道,懸掛的自動摘鉤裝置在軌道上行走,行走軌道分布在列車兩側。其特點是該裝置充分利用了駝峰的空間,縮小了地面占用量,受地形影響小。主體結構分為行走系統和摘鉤系統兩部分,采用電液混合的工作方式。其結構如圖1所示。
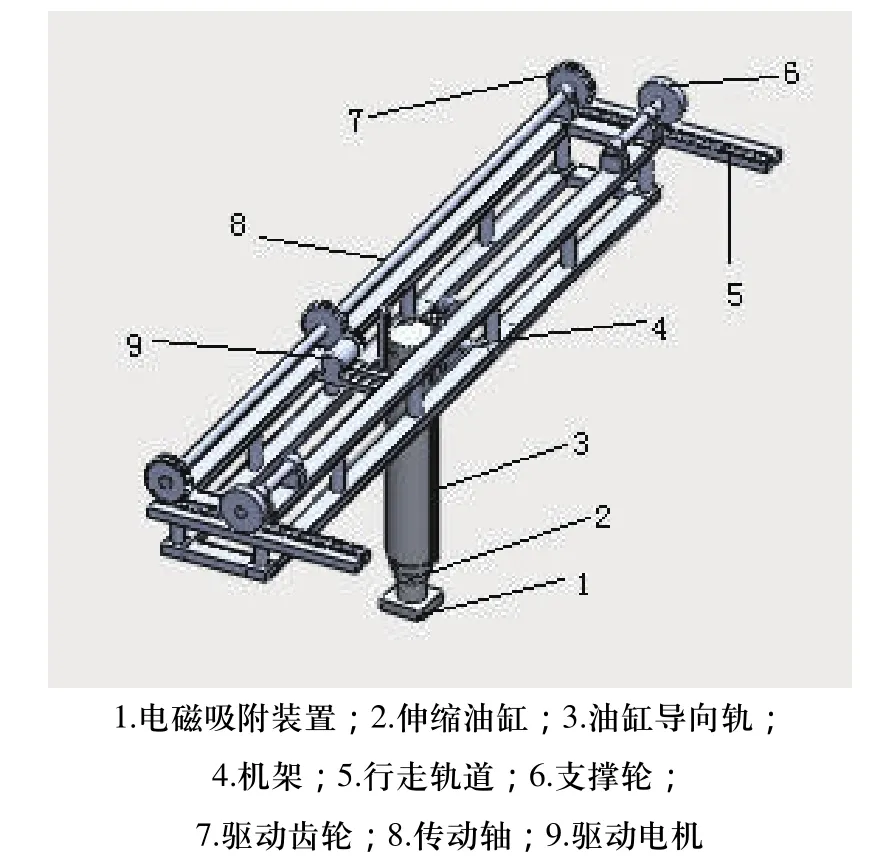
圖1 自動摘鉤裝置
1.2 自動摘鉤裝置的作業過程
自動摘鉤裝置的作業過程分為五個步驟。
第一步,自動摘鉤裝置接收到摘鉤命令后,電機驅動行走系統開始定位摘鉤點,直至摘鉤裝置與待編車鉤達到同步;第二步,液壓缸的三節套筒開始以一定的速度下降,直到安裝在裝置端部的電磁機構上的傳感器接觸到改進后的車鉤后,停止向下運動;第三步,電磁機構吸附車鉤上鉤銷,隨即液壓缸開始做向上提拉動作,完成摘鉤作業;第四步,電磁機構保持吸附直至達到分鉤點后,液壓缸整體做上升運動,與此同時完成收縮運動;第五步,自動裝置返回初始位置,準備下一鉤動作。
1.3 自動摘鉤裝置的動作分析
取自動摘鉤裝置末端執行器的質心作為仿真marker點,并繪制理論上完成一次摘鉤作業該marker點的軌跡圖,如圖2所示[3]。
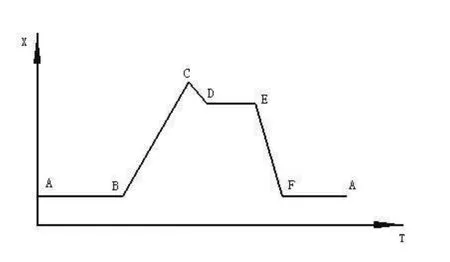
圖2 末端執行器質心理論軌跡圖
圖2 中:
1)A-B段:自動摘鉤裝置追蹤定位
A點為自動摘鉤裝置的初始位置,初始點;
B點為自動摘鉤裝置定位車鉤并同步的位置,同步點;
該段為摘鉤裝置接到控制命令后,以一定的加速度精確定位到本次摘鉤的車鉤位置,并保持與車鉤相對靜止。
2)B-C段:摘鉤準備
C點為本次摘鉤動作的起點,摘鉤點;
當自動摘鉤裝置與車鉤相對靜止后,裝置支架部分繼續與貨車同步向前行走,與此同時伸縮油缸部分開始做摘鉤準備動作,到達C點時由末端執行器開始摘鉤。
3)C-D段:摘鉤動作
D點為本次摘鉤動作的終點,護鉤點;
本階段摘鉤裝置由行走系統的驅動并保持與車鉤同步,再由摘鉤系統第一節液壓缸的拉力完成提拉動作。實際提拉距離根據車鉤的種類不同,距離會有所差別。
4)D-E段:護鉤動作
E點為護鉤動作的終點,分鉤點;
為了防止已經摘解完畢的車鉤在失去拉力的瞬間產生沖擊,使其在自重的作用重新鎖死。故在摘鉤動作完成后,繼續對其施加拉力,即護鉤。
5)E-F段:液壓缸收縮
F點為裝置末端執行器的初始位置;
本階段在完成護鉤動作后,摘鉤裝置應迅速收縮,恢復到初始狀態。
6)F-E段:返回初始狀態
2 駝峰自動摘鉤裝置軌跡仿真
2.1 摘鉤裝置仿真模型的建立
首先用Solid Works軟件建立自動摘鉤裝置的三維模型,然后將該模型另存為*.x_t格式,并導入Adams環境中,依次定義每個零件的材料、顏色、屈服強度、泊松比等物理屬性[4],如圖3所示。最后在各個零件之間添加相應約束副,具體如下。
圖3 自動摘鉤裝置樣機
1)齒條與大地相接構成固定副;
2)行走裝置采用兩個齒輪副:Gear1和Gear2,驅動為:MOTION_xingzouqd;
3)液壓缸與機架采用齒輪齒條配合:Gear4,驅動為:MOTION_yeyaqd;
4)液壓缸與活塞桿之間為移動配合分別為:Joint17、Joint18、Joint19,對應的驅動為:MOTION_yeya43、MOTION_yeya32、MOTION_yeya21。
至此,已建立好自動摘鉤裝置的仿真模型。
2.2 Step函數的建立
根據圖2末端執行器質心理論軌跡圖,運用Step函數設置各個驅動,如表1所示。
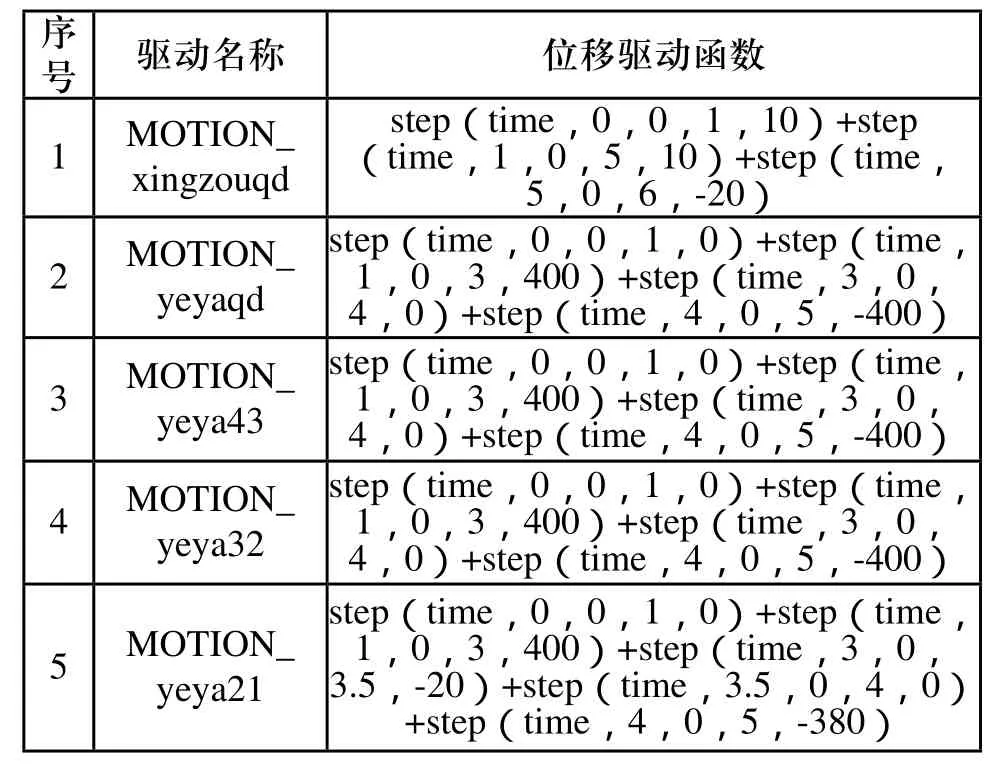
表1 自動摘鉤裝置樣機關節驅動
各個驅動關節的驅動函數折線如圖4~6所示。

圖4 函數1折線圖
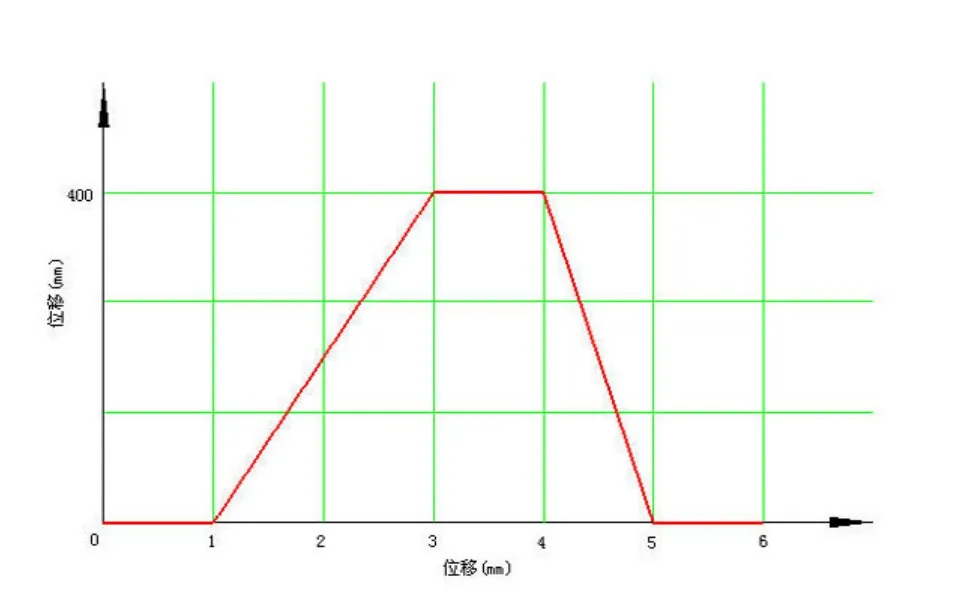
圖5 函數2、3、4折線圖
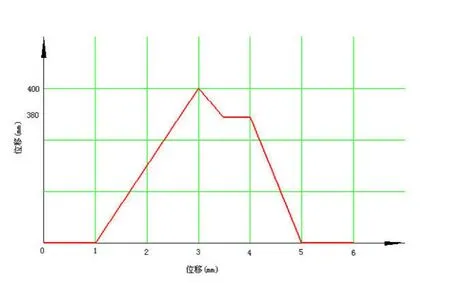
圖6 函數5折線圖
3 仿真分析
設定仿真時間為6s,仿真步數為1000。然后,觀察自動摘鉤裝置末端執行器仿真運動情況,待仿真完成,進入adams/Postprocessor窗中調出末端執行器質心的軌跡圖,如圖5所示[5]。將末端執行器質心實際軌跡圖與理論軌跡圖進行對比,不難看出:
1)仿真軌跡圖中0~1s代表理論軌跡圖中A-B段,即追蹤定位;
2)仿真軌跡圖中1~3s代表理論軌跡圖中B-C段,即摘鉤準備;
3)仿真軌跡圖中3~3.5s代表理論軌跡圖中C-D段,即摘鉤動作;
4)仿真軌跡圖中3.5~4s代表理論軌跡圖中D-E段,即護鉤動作;
5)仿真軌跡圖中4~5s代表理論軌跡圖中E-F段,即液壓缸收縮;
6)仿真軌跡圖中5~6s代表理論軌跡圖中F-E段,即返回初始狀態。
仿真軌跡曲線與理論軌跡曲線變化趨勢相吻合。
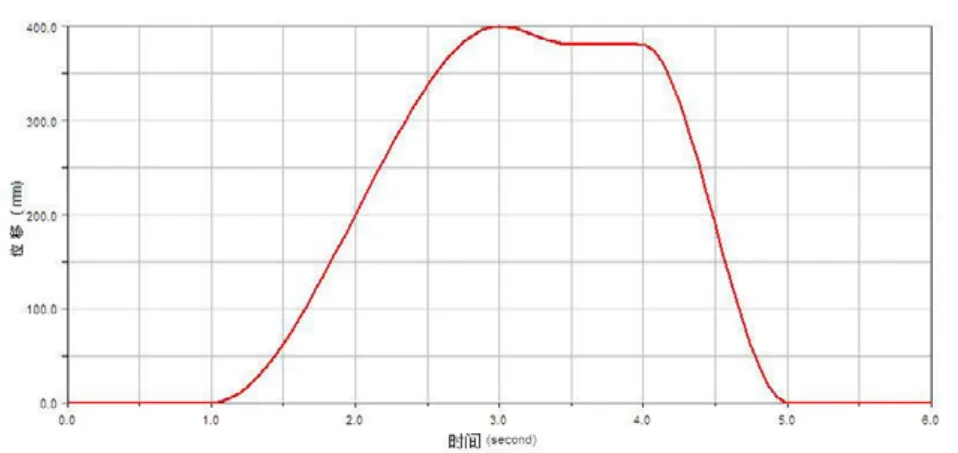
圖7 末端執行器質心實際軌跡圖
4 結論
通過Adams對自動摘鉤裝置的運動仿真,得到了其末端執行器質心的運動軌跡。仿真結果顯示仿真曲線與理論曲線吻合性良好,從而可以說明自動摘鉤裝置運動功能的可行性。另外,仿真結果為駝峰自動摘鉤裝置的控制策略提供了依據,為實現駝峰全面自動化奠定了基礎,在編組站自動化改造中具有一定的參考價值。
[1] 徐為民.鐵路提鉤機器人技術的研究[J].鐵道學報,1992(3):32-37.
[2] 楊長葵.起重機械[M].北京:機械工業出版社,1992.
[3] 董海薇.一種新型鐵路貨車自動摘鉤系統模型的研制[D].北京交通大學,2006.
[4] 鄭建榮.ADAMS虛擬樣機技術入門與提高[M].北京:機械工業出版社,2002.
[5] 陳德民,槐創鋒,張克濤.精通ADAMS虛擬樣機技術[M].北京:化學工業出版社,2010.
猜你喜歡
作文周刊·小學一年級版(2022年16期)2022-05-07 11:28:30
作文周刊·小學一年級版(2021年8期)2021-07-07 11:00:47
動漫界·幼教365(大班)(2021年4期)2021-05-23 21:33:16
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文周刊·小學一年級版(2016年28期)2017-06-03 00:28:49
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
少兒科學周刊·少年版(2015年4期)2015-07-07 20:56:37
電影故事(2015年30期)2015-02-27 09:03:12
七彩語文·低年級(2014年10期)2015-01-14 14:46:27
