視覺識別機器人在物流作業中的智能應用
2013-08-22 07:35:00金桂根穆建軍
制造業自動化 2013年11期
金桂根,穆建軍
(1. 昆明理工大學,昆明 650504;2. 云南財經大學,昆明 650221;3. 昆船物流信息產業有限公司,昆明 650051)
0 概述
從作業方式來看,工業機器人在生產制造中的應用主要為產品的焊接和裝配,在物流作業中的應用主要為物料的堆碼和拆垛。據不完整統計,前者的總數占比約為70%~80%,后者的總數占比約為20%~30%,近年來后者的增長速度較前者快。隨著物流領域對自動化、智能化的要求進一步提高,工業機器人的應用范圍將進一步擴大,在物流系統中的應用也就不僅僅局限于規范物料的堆碼和拆垛,而需要處理復雜多變的工藝模式及形態各異的物料品項。例如,在卷煙生產物流作業系統中,工業機器人除了對比較規范的成品件箱進行堆碼、拆垛作業,還要對木夾板煙包進行剪帶、切膜、抓板、去夾板作業,對形狀各異的卷煙輔料根據卷接包生產機組的需要進行任意的堆碼配盤。
然而,對于多種尺寸不同形態的物料品項及復雜的物料處理工藝,傳統的條碼識別和RFID識別不能足以辨識物料信息與狀態信息。在機器人系統中集成先進的機器視覺識別技術,就如給機器人配上了一雙眼睛,通過圖像獲取、圖像識別、圖像定位,并自編程序去適應工作對象,能增加機器人自適應、自學習功能,使之具有更高的智能性,并能完成復雜條件下的物料處理作業,從而進一步提升工業機器人在物流作業系統中的適用性和可靠性。
1 視覺識別
“機器視覺”,即采用機器代替人眼來做測量和判斷,通過CCD/CMOS圖像攝取裝置抓取圖像后將圖像傳送至處理單元,通過數字化處理,根據像素分布和亮度、顏色等信息,來進行尺寸、形狀、顏色等的判別,進而根據判別的結果來控制相應設備的動作。伴隨計算機技術、現場總線技術的發展,視覺識別技術日臻成熟,已是現代制造業及現代物流業不可或缺的產品,目前已廣泛應用于各個行業。
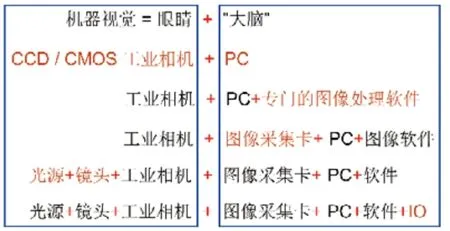
圖1 視覺識別系統配置模式
視覺識別主要指在抓取或放置物品時的物品識別,主要由機器視覺及系統軟件組成,其配置模式如圖1所示。在接收到傳感器發出的物品識別及定位的請求后,系統通過攝像頭獲取物品圖像,再由視覺系統軟件利用獲取的物品圖像與預先攝取并存儲于圖像數據庫的物品信息比較,搜尋與獲取的物品信息相匹配的存儲圖像。需識別的物品便是與獲取的物品圖像相匹配的存儲圖像所對應的物品,計算并返回系統該物品當前的位置及狀態信息,進而上傳給機器人控制系統進行相應動作。
2 工業機器人
工業機器人是機電一體化、信息及人工智能等多學科交叉的自動化裝備,主要由本體、驅動系統和控制系統三個基本部分組成。本體包括臀部、臂部和手部等機械結構,驅動系統包括動力裝置和傳動機構,用以使執行機構產生相應的動作;控制系統是按照輸入的程序對驅動系統和執行機構發出指令信號,并進行控制。
應用工業機器人的自動作業,不僅可提高產品的質量與產量,而且對減輕工人勞動強度,改善勞動條件,降低作業成本等方面均有著非常重要的意義。目前,機器人技術及其產品已成為生產制造及物流作業中非常重要的自動化工具,進而是智能化工具;就像計算機、網絡技術一樣,工業機器人的廣泛應用正在日益改變著人類的生產和生活方式。圖2為工業機器人在物流作業中的一般應用。

圖2 工業機器人物流堆碼/拆垛作業
3 智能應用案例
3.1 簡介
在卷煙工業生產自動化物流作業過程中,為了保證卷煙品質,卷煙工藝要求不同品牌的生產煙絲中不能混合,所以對存貯原料的周轉容器的清潔度要求很高,在翻箱倒料后不能在箱底及內側留下殘留物。如果采用人工方式對物料進行檢查識別,并進行殘留原料的清掃處理,勞動強度會很大,質量不一定能得到保證,而且會影響工人的身體健康。
在案例中采用了Siemens機器視覺識別系統,配合ABB工業機器人進行智能作業,其基本流程為:周轉箱輸送到站臺工位,機器人抓取后旋轉,完成翻箱倒料作業,并在機器視覺系統和清掃裝置的配合下,完成箱體內側殘留煙絲的清掃工作,完全滿足卷煙生產工藝及質量要求。由于抓取箱體的重量超過150千克,長寬高尺寸均大于1m,應用了較大寬度尺寸的機器人夾具,其三維示意圖如圖3所示。
機器人可以實現復雜動作的自動化,但難以實現自適應作業的智能化。可以想象,在該案例中,除了視覺識別,似乎沒有其它感應及檢測技術能自動識別箱體內殘留物的隨機出現的位置及狀態,以使機器人能夠有效地進行智能作業,所以該案例具有一定的代表性。
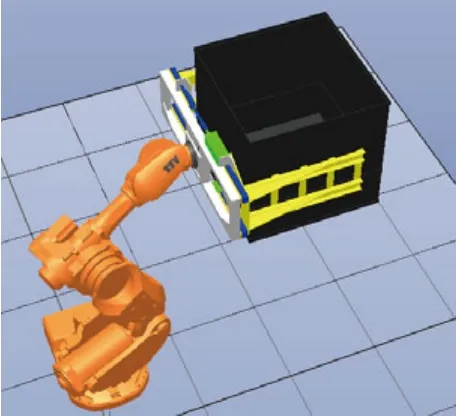
圖3 視覺識別機器人作業示意圖
3.2 系統配置
機器視覺識別系統主要包括光源、照相機系統、圖像處理單元、圖像處理組態軟件、監視設備、通訊輸入輸出單元等,系統配置如圖4所示,其中VS Link具備了多種實用的接口,可同時觀測多幅圖像和結果表,可通過工業以太網集中監測多個視覺傳感器,SIMATIC S7是系統的主控制器,具備以太網和PROFIBUS-DP接口,VS72X是機器視覺識別系統的主要部件,它通過以太網與系統其他部件進行通訊。
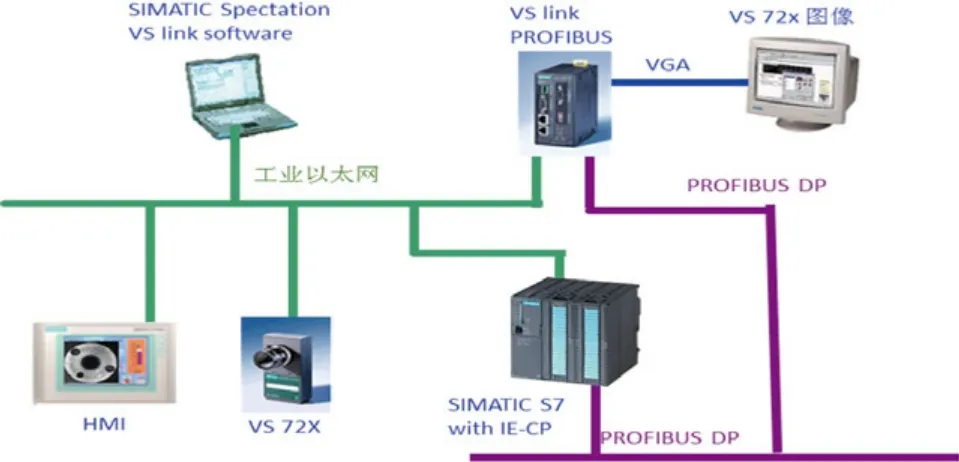
圖4 視覺識別系統配置示意圖
3.3 識別功能
通過軟件組態,機器視覺識別系統提供了以下五種功能:
1)灰度識別:使用灰度測試的軟傳感器對灰色范圍分布作測定;
2)顏色分析:顏色照相功能可以將不同顏色的物體分割、分配和預處理;
3)斑點分析:通過對幾何圖形的分析,實現對斑點的查找、計數和跟蹤功;
4)代碼讀取:在各種窗口中讀取一維或二維代碼進行翻譯;
5)測量工具:可用于測量距離和角度。
3.4 應用結果
由于原料為深黃色,而且比較吸光,因此使用了機器視覺識別系統中的灰度識別功能對殘原料進行識別。經過認真組態,系統對具有殘留原料的箱體能夠做出正確的評判(報告結果分為三種狀態:正常、報警和失敗),完成監測和操作任務,識別準確率及機器人作業成效均達到了卷煙生產的工藝及質量要求,總體應用各項指標良好。
4 結束語
機器視覺識別系統的應用,在一定程度上解放了人眼,增強了機器人的智能特征。但在上述案例實施過程中,我們發現外界環境的改變將直接影響到系統識別的穩定性。首先,照相機與待識別物之間的相對位置應盡量固定,位置的改變將導致捕獲的圖像有所偏移,直接影響到識別效果,因此相機的固定非常重要;其次,由于光源的變化會影響成像質量,在精度要求較高的情況下,這將直接影響到識別效果;另外,由于是對物體的成像進行識別,箱體顏色應盡量與物料顏色區別開,近似的顏色及紋理不利于識別。
所以,在機器人作業系統集成視覺識別技術的過程中,需要針對作業環境作相應的系統設計和調試,實現系統穩定可靠。隨著3D機器視覺、計算機及網絡技術的新進步,集成有視覺識別技術的工業機器人將具有更高的智能和柔性,從而能適應復雜的作業對象,能在物流領域有著更為廣闊的應用空間。
[1] 張鶴松.煙草生產物流中機器人作業的應用[J].物流技術與應用,2009(05).
[2] 曹月琴,穆建軍,樓冬梅.機器視覺識別技術在煙絲/煙葉箱式自動存儲系統中的應用[J].物流技術與應用,2010(05).
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
物流技術與應用(2019年8期)2019-09-04 03:29:56
汽車觀察(2018年12期)2018-12-26 01:05:44
家庭影院技術(2017年9期)2017-09-26 03:41:45
故事大王(2016年7期)2016-09-22 17:30:08
現代企業(2015年2期)2015-02-28 18:45:09
商界(2014年12期)2014-04-29 00:44:03
