基于LabVIEW的汽車巡航控制系統(tǒng)設計
2013-08-31 02:31:50仇成群
裝備制造技術 2013年2期
仇成群
(鹽城師范學院物理科學與電子技術學院,江蘇 鹽城 224051)
巡航控制系統(tǒng)(cruise control system,縮寫為CCS),又稱為恒速行駛系統(tǒng)。駕駛員通過巡航控制開關設定某一個車速,在巡航控制期間,能夠按存儲在微電腦內的汽車燃料最佳經(jīng)濟性規(guī)律穩(wěn)態(tài)行駛。汽車定速巡航控制系統(tǒng)自從20世紀60年代末、70年代初起,全球各大著名汽車廠家就競相研制并將其裝配在各自公司的高級轎車上,由于微電腦技術迅速發(fā)展,到21世紀初期,汽車巡航控制系統(tǒng)日趨成熟。汽車定速巡航控制系統(tǒng)通常采用多模塊控制,成本相對昂貴。文中提出基于LabVIEW的汽車巡航控制系統(tǒng),該巡航控制系統(tǒng)成本低,精度和穩(wěn)定性高[1~5]。
1 模糊PID汽車巡航控制系統(tǒng)
1.1 傳統(tǒng)PID控制在汽車巡航控制中的運用
CCS由信號輸入裝置、巡航控制電控單元和執(zhí)行器等組成。汽車各種相關傳感器和開關將信號送入CCS電控單元,電控單元由此計算發(fā)動機節(jié)氣門開度,并控制執(zhí)行器工作,自動調節(jié)發(fā)動機節(jié)氣門開度。
PID控制為比例—積分—微分控制,其是根據(jù)汽車實際行駛車速與設定車速之間的偏差,參考過去、針對現(xiàn)在、預估將來等各種狀況,實現(xiàn)系統(tǒng)不變參數(shù)的汽車巡航控制。控制器的積分控制把車速偏差累計起來通過加大控制量減小車速偏差,使行駛車速能夠保持恒定穩(wěn)定工作狀態(tài)。控制器的微分控制起預估作用。當被控制對象的特性復雜、具有強非線性或者時變性時,常規(guī)PID控制參數(shù)在調整不適當時,會使控制系統(tǒng)振蕩,造成工作狀態(tài)不穩(wěn)定,控制效果表現(xiàn)不佳,而難以實現(xiàn)有效控制[2~3]。
1.2 模糊控制器的設計
將巡航控制系統(tǒng)的速度誤差絕對值|E|和速度誤差變化率絕對值|EC|作為模糊控制器的輸入語言變量。以它們變化范圍來定義模糊集上的域論。
定義3個輸出語言變量:
(1)Kp'為比例系數(shù)調校參數(shù);
(2)Ti'為積分系數(shù)調校參數(shù);
(3)Td'為微分系數(shù)調校參數(shù)。
模糊控制器有2個輸入語言變量|E|和|EC|,3個輸出語言變量Kp'、Ti'和Td',歸納出模糊控制規(guī)則表。
2 基于LabVIEW 的巡航控制系統(tǒng)
2.1 LabVIEW 簡介
LabVIEW由美國NI公司出品,是一個功能強大而又靈活的儀器和分析軟件應用開發(fā)工具。設計人員可以在LabVIEW 中采用多種途徑生成和編輯模糊推理系統(tǒng),以命令行函數(shù)來實現(xiàn)控制系統(tǒng)功能[3]。
2.2 基于LabVIEW 的巡航控制系統(tǒng)
將隸屬函數(shù)與參數(shù)調節(jié)規(guī)則輸入模糊邏輯工具箱中,完成模糊控制器的設計,得到PID參數(shù)模糊矩陣表[2~5]。當控制系統(tǒng)運行時,對模糊規(guī)則結果進行數(shù)據(jù)處理,然后完成對PID參數(shù)的調校。得出比例—積分—微分系數(shù)調校參數(shù)(Kp'、Ti'、Td')的控制表。將模糊控制與PID控制有效地結合起來建立模糊PID控制系統(tǒng)。
3 仿真實驗
實驗計算機配置為:Intel(R)Core(TM)2 Duo CPU T6670@2.20GHZ,2.00GB的內存,500G硬盤,操作系統(tǒng)為Window7;環(huán)境編程為LABVIEW2010正式版。實驗參數(shù)如下:
(1)仿真觀察時間:2012/5/10 09:00:00~12:00:00。
(2)仿真系統(tǒng)主界面可分為車輛基本信息模塊,環(huán)境狀態(tài)檢測模塊和系統(tǒng)仿真結果模塊。
(3)仿真過程中通過Kp,Ti,Td 參數(shù)調節(jié)獲得PID參數(shù),使輸出階躍響應達到預期效果,再輸入巡航車速,點擊開始按鈕進行仿真。根據(jù)牛頓第二定律,汽車的運動方程為:

式中,
Fa為加速阻力,N;
Fe為驅動力,N;
Ff為行駛阻力,N;
Fw為空氣阻力,N;
Fh為坡度阻力,N;
δ 為計入旋轉質量慣性力偶矩后的汽車質量轉換系數(shù);
m 為汽車質量,kg;
a 為加速度,N/kg。
取汽車質量m=1 500 kg;道路坡度α =0;傳動系統(tǒng)效率η=0.90%;空氣阻力系數(shù)Cd=0.30;路面摩擦系數(shù)μ=0.40;車速;發(fā)動機最大輸入轉矩Ttq=250 N·m;最大功率轉數(shù)n=4 500 rpm;前后輪規(guī)格215/60R16。
根據(jù)文獻[5]計算汽車的運動方程。在LabVIEW環(huán)境下,要先建立汽車動力系統(tǒng)模型,然后再建立模糊PID控制器系統(tǒng)模型,再將汽車動力系統(tǒng)模型和模糊PID控制器系統(tǒng)模型通過運算結合得到汽車巡航系統(tǒng)控制模型[3~5]。
在LabVIEW 中建立汽車巡航控制仿真測試系統(tǒng)如圖1所示。對車速為80 km/h時的模糊PID與傳統(tǒng)PID控制曲線進行仿真對比,從仿真數(shù)據(jù)可以得到模糊PID控制曲線的響應時間快于傳統(tǒng)PID控制曲線的響應時間,而且超調量也小,其穩(wěn)定性明顯好于傳統(tǒng)PID控制。
通過仿真試驗控制結果表明:基于LabVIEW的控制系統(tǒng)能夠對PID控制參數(shù)進行實時調整,通過調校參數(shù)Kp'、Ti'、Td'將汽車巡航車速控制在設定的車速值偏差范圍內,系統(tǒng)超調量小,實現(xiàn)了巡航控制穩(wěn)定性的要求。通過仿真得到當采用基于LabVIEW的汽車巡航控制系統(tǒng)的控制超調量小,響應速度快,控制系統(tǒng)具有良好的穩(wěn)定性。
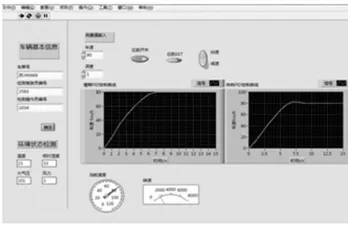
圖1 汽車巡航控制仿真測試系統(tǒng)
4 結束語
文中對汽車巡航控制算法進行了研究,設計的基于LabVIEW 的汽車巡航控制系統(tǒng),可以顯著改善巡航控制系統(tǒng)的控制品質,并且系統(tǒng)成在2 000元人民幣左右,成本相對較低。系統(tǒng)超調量小,穩(wěn)定時間快,實現(xiàn)了駕駛員對于穩(wěn)定性的要求,控制效果良好,可以較好地滿足汽車巡航需求,設計系統(tǒng)具有較好的市場應用價值。
[1]Kocaarslan I,Cam E.Experimental modeling and simulation with adaptive controlofa power plant[J].Energy Conversion and Management,2007,48(3):787-796.
[2]Leng G,Thomas M G,Girijesh P.An approach for on-line extraction of fuzzy rules using a self-organizing fuzzy neural network[J].Fuzzy Setsand Systems,2005,150(2):211-243.
[3]王立新,王迎軍.模糊系統(tǒng)和模糊控制[M].北京:清華大學出版社,2003.
[4]仇成群,劉成林,沈法華,等.基于MATLAB和模糊PID的汽車巡航控制系統(tǒng)設計[J].農(nóng)業(yè)工程學報,2012,28(6):197-202.
[5]余志生.汽車理論[M].北京:機械工業(yè)出版社,2009.
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
藝術啟蒙(2018年7期)2018-08-23 09:14:18
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50
