利用LD激光器和線陣CCD實現亞毫米級絕對距離測量
2013-08-31 02:32:02張樹才
裝備制造技術 2013年2期
關鍵詞:測量
張樹才
(裝備學院,北京101416)
激光測距主要有脈沖式、相位式和干涉式三種方法[1]。脈沖式主要針對遠距離測量,精度約在1m量級;相位式主要針對中近距離測量,精度約在毫米量級;干涉法有很高的測量精度可達皮米級,目前在產品級別只能進行相對距離測量[1]。雖然干涉法在實驗室有進行絕對距離測量的相關論文[2],但對光源及其外圍器件要求太高無法進行商品化生產。本文提出了利用LD激光器和線陣CCD實現亞毫米級絕對距離測量。
1 利用LD激光器和線陣CCD實現絕對距離測量
1.1 基本測量原理
基本測量原理如圖1所示。
LD光源與線陣CCD安裝在同一平面上,當被測目標位于初始位置b1時,從LD光源發出的光以α角度射向被測目標B1點后被反射到線陣CCD的C1點,當被測目標移動到b2位置時,從LD光源發出的光以同樣角度射向被測目標B2點后被反射到線陣CCD的C2點形成三角形AB2C2,由于被測目標反射面的安裝與LD光源和線陣CCD安裝平面平行,則:

上式中C1C2是線性CCD通過相關電路測出的相對長度,AB1、AC1和激光發射角α 是初始常量,通過式(2)可解算出B1B2,將其代入式(1)即可解算出測試距離b1b2,這樣被測目標的絕對空間距離與線陣CCD感光點建立了一一對應的關系,當被測目標位移較短時可得到較高的精度。
1.2 利用亞像素技術實現精度保證
圖像幾何測量的基本原理是通過運用數字圖像處理方法處理被測對象的邊緣而獲得被測對象的幾何參數。為提高測量精度,可以通過改變硬件和優化軟件兩種方法實現。改變硬件主要是提高CCD的分辨率,但CCD的分辨率是有限的,而且分辨率越高其價格也越昂貴,將極大地增加系統的成本。優化軟件則是通過采用高精度的邊緣提取算法—亞像素定位方法,對圖像中目標進行亞像素細分處理。
所謂亞像素測量即測量精度優于硬件像素的分辨率。通常測量判斷光斑中心點采用閾值判斷,電平高于某值輸出“1”,低于某值輸出“0”,得到的分辨率與像素數量相當。亞像素則是利用A/D變換器作為像素感光值輸出,假設有兩個像素存在感光,左邊的感光值為20,右邊的感光值為100,采用計算像素的感光值所占的權重比,在此為20/100=1/5,則得出光斑中心應處于右邊像素偏左1/5像素間隔處,如果A/D轉換器的位數為8位則理論上精度可提高255倍,由于線陣CCD像素是離散的即其輸出并不能完全反映光點的絕對位置,經實際驗證采用亞像素技術精度提高2~5倍時數據是可信的[3]。
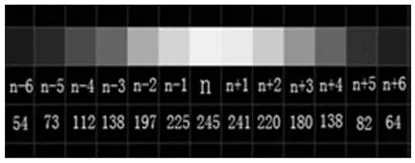
圖2 實際線陣CCD激光光斑成像圖
圖2為實際線陣CCD激光光斑成像圖,輸出采用8位A/D采樣,下面一行數字為對應像素單元的亮度值,可以看出亮度值是一個漸變的過程而且左右漸變并不嚴格對稱。本文采用的方法是先尋找到最大值,然后在最大值兩邊各取同樣數量的像素值算術求和,最后用力矩平衡計算光斑中心位置。
2 系統實現
本文是某機器設備平衡控制系統平衡錘位置感知模塊,系統結構如圖3所示。模塊由LD激光器、準直鏡、反射鏡、線陣CCD、A/D轉換器、控制器和受控電源組成。使用受控電源是為滿足系統節電需求。
模塊工作過程如下:平時模塊處在待機狀態,當設備平衡控制系統要調整平衡錘位置時首先發出指令打開模塊受控電源,模塊上電進行初始化,模塊完成初始化后首先對被測目標進行距離測量,完成后控制器向上位機發出數據上傳請求,上位機應答后上傳數據,完成后等待上位機發出新的測距指令。測距完成后上位機通過關閉可控電源使模塊進入待機狀態完成一個測距循環。
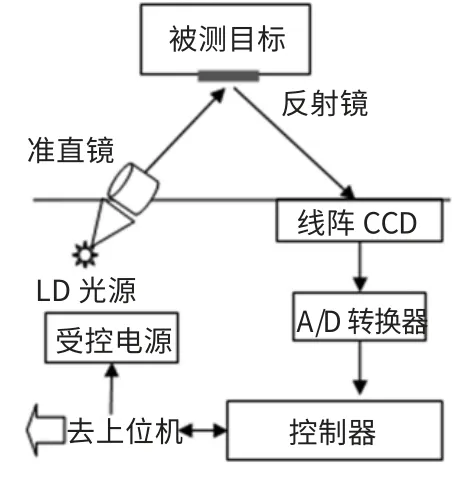
圖3 系統結構圖
3 結束語
本文提出了利用LD激光器和線陣CCD實現了亞毫米級的非接觸絕對距離測量,測長可達2m,但本方法只能在近距離得到較高的精度,而且對合作目標要求有一定的軸向穩定性,因而也限制了使用范圍。
[1]李 梟.半導體激光測距系統的優化研究[D].北京:北京郵電大學,2010.
[2]梁 晶,龍興武,張 斌,等.一種新型多波長絕對距離干涉測量系統的研究[J].光學技術,2008,(9):77-78.
[3]王后順.ATOS光學測量技術[J].寶力機械,2012,(5):169-170.
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
