關(guān)于動力總成懸置系統(tǒng)模態(tài)能量表達的一個注記
2013-09-03 10:06:02侯之超
汽車工程 2013年3期
童 煒,侯之超
(清華大學(xué),汽車安全與節(jié)能國家重點實驗室,北京 100084)
前言
汽車動力總成是汽車主要的振動和噪聲源。動力總成懸置設(shè)計的好壞,直接影響著整車的NVH性能。有效的懸置設(shè)計,不但要求合理設(shè)定系統(tǒng)的各階固有頻率大小,而且也須盡可能解除振動耦合[1-9]。對于依據(jù)剛體-彈性支承模型建立的6自由度動力總成懸置系統(tǒng)方程,可定義6×6階模態(tài)能量分布矩陣[1-5]。動力學(xué)仿真軟件ADAMS因其直觀性與強大的功能,正日益廣泛地應(yīng)用于懸置的優(yōu)化與分析[6,8-9]。它引入了6×9階能量分布矩陣,并給出各分量的簡單計算式。迄今,尚未見文獻明確闡述兩種能量表示方式之間的關(guān)系。這不利于ADAMS軟件在動力總成懸置設(shè)計中的推廣應(yīng)用。
本文中首先回顧了基于彈性支承空間剛體動力學(xué)建立的動力總成懸置系統(tǒng)方程,介紹了能量解耦方法及其所定義的能量分布矩陣。在應(yīng)用ADAMS軟件進行動力總成懸置系統(tǒng)自由振動分析的基礎(chǔ)上,給出了其中所定義的能量分布矩陣元素的計算式。通過對比分析,闡述了兩種能量分布矩陣之間的差異與關(guān)系。最后通過某款汽車的動力總成懸置系統(tǒng)對有關(guān)結(jié)果予以驗證。
1 系統(tǒng)動力學(xué)方程及模態(tài)能量
1.1 系統(tǒng)動力學(xué)方程
動力總成隔振設(shè)計的基本理論是彈性支承空間剛體動力學(xué)。其中,將包括發(fā)動機、離合器和變速器在內(nèi)的動力總成簡化為剛體,懸置軟墊簡化為線彈性彈簧。圖1為一個4點懸置支承的動力總成系統(tǒng)示意圖。圖中,坐標系x軸與曲軸中心線重合,正向指向發(fā)動機前端,z軸與氣缸軸線平行、正向垂直向上,y軸由右手法則確定。通常,固定坐標系GXYZ和隨體坐標系o-xyz原點均在質(zhì)心處,靜平衡狀態(tài)下二者重合。
忽略懸置膠墊的阻尼,系統(tǒng)作自由振動的微分方程為
式中:M、K分別為質(zhì)量矩陣與剛度矩陣;q為廣義位移向量;l為懸置個數(shù);ki為懸置i的3向剛度矩陣;D、O分別為懸置位置與安裝角定義的變換矩陣。
1.2 基于模態(tài)能量的振動解耦
從能量角度來看,振動耦合就是沿著某個廣義坐標方向施加的力或力矩所做的功轉(zhuǎn)化為系統(tǒng)在多個坐標方向的動能和勢能。對于保守系統(tǒng),機械能守恒。因此任一階主振動的總能量可用最大動能或最大勢能表示。
多自由度振動系統(tǒng)作第n階主振動的最大動能為
式中:ωn與Xn分別為系統(tǒng)的固有圓頻率與對應(yīng)主振型向量。將式(2)展開,并定義第i個廣義坐標上的動能及其在總能量中的百分比分別為
式中:(Xn)k(k=i,j)表示振型向量的第k個分量;Mij為質(zhì)量矩陣中第i行j列的元素。的大小表示能量集中程度,若其值為100%,則說明系統(tǒng)第n階主振動的能量全部集中在第i個廣義坐標方向,而其它廣義坐標方向的振動為零,這就實現(xiàn)了振動解耦。工程實際中,由于布置空間和成本等方面的限制,難以在6個廣義坐標方向都實現(xiàn)振動解耦(即完全解耦)。因此,現(xiàn)代汽車動力總成懸置設(shè)計通常采用部分解耦,特別是在激振能量大的方向上要保證解耦。
1.3 模態(tài)能量分布矩陣
考察在任一主振動中各坐標方向上的能量分布。依據(jù)式(3)和質(zhì)量矩陣的定義可知,3個平動坐標方向的能量為
3個轉(zhuǎn)動坐標方向上的模態(tài)動能分別為
式(5)為系統(tǒng)第n階主振動時沿x、y和z方向的平動能量分量。式(6)~式(8)則分別表示系統(tǒng)轉(zhuǎn)動能量分量,每項均包含繞坐標軸純轉(zhuǎn)動和繞平面轉(zhuǎn)動兩個部分。對式(1)所示6自由度動力總成懸置系統(tǒng)方程,分別對各階主振動依據(jù)式(5)~式(8)計算,帶入式(4)最終得到一個6×6階模態(tài)能量分布矩陣,稱為基于自由度的模態(tài)能量分布矩陣。
2 ADAMS建模過程及模態(tài)能量
將CAD軟件建立的動力總成三維幾何模型導(dǎo)入ADAMS/View后,輸入動力總成的慣量參數(shù)和懸置軟墊的彈性與阻尼參數(shù),參數(shù)化后即可完成系統(tǒng)動力學(xué)建模。在ADAMS中,將系統(tǒng)分成若干子系統(tǒng),分別計算各個子系統(tǒng)的能量,求和得到系統(tǒng)的總能量。設(shè)系統(tǒng)被分成k個子系統(tǒng),第n階主振動時系統(tǒng)總的模態(tài)能量可表達為
顯然每個能量分量均表示對慣性張量某分量的貢獻。其中:式(11)代表子系統(tǒng)質(zhì)量的影響,對應(yīng)沿廣義坐標x、y和z方向的平動能量;式(12)~式(14)代表子系統(tǒng)轉(zhuǎn)動慣量的影響;式(15)~式(17)則代表子系統(tǒng)慣性積的影響;兩組元素分別對應(yīng)繞廣義坐標x、y和z軸的一部分轉(zhuǎn)動能量。
依據(jù)式(9)和式(11)~式(17),子系統(tǒng)第e個能量分量在該階主振動總能量中的百分比為
分別對6階主振動進行計算即得到一個6×9階矩陣,可稱為基于慣性參數(shù)的能量分布矩陣。
3 兩種能量表達式的對比
應(yīng)用ADAMS軟件進行動力總成懸置系統(tǒng)自由振動分析時,將發(fā)動機、變速器和離合器等視為一個剛體,通常不計入支架、車身等結(jié)構(gòu)的影響。這樣整個系統(tǒng)只有一個子系統(tǒng),即j=1。
對比式(5)~式(8)與式(11)~式(17)可知
在以上各式中已應(yīng)用慣性張量的對稱性,即Jxy=Jyx,Jyz=Jzy,Jxz=Jzx。依據(jù)這組關(guān)系式可確定式(4)與式(18)所示能量百分比之間的對應(yīng)關(guān)系。
顯然,式(5)~式(8)所定義的能量分量,因與自由度對應(yīng),故物理意義更為明確。另外,ADAMS軟件在定義模態(tài)能量分量時,在保持平動能量分量不變的同時,將與轉(zhuǎn)動相關(guān)的3個能量分拆成6個彼此更為簡單而無交叉的分量,以分別描述轉(zhuǎn)動慣量或慣性積對系統(tǒng)主振動能量的貢獻。這樣更易于反映系統(tǒng)各慣性參數(shù)的影響。
由式(19)~式(22)可知,式(9)和式(10)定義的總的模態(tài)能量(j=1)與式(2)完全一致。這是由模態(tài)能量的物理意義決定的。
不難理解,式(6)~式(8)或式(20)~式(22)給出的能量值及其百分比可能小于零。在工程應(yīng)用中,為避免負值能量與模態(tài)動能概念之間的不協(xié)調(diào),可取絕對值計算能量分量、能量和與能量百分比[7]。但這種處理后,分布矩陣元素均為正值,總能量會偏大,各元素值也異于不取絕對值得到的結(jié)果。
4 算例及分析
某款汽車的動力總成采用4點懸置,其基本參數(shù)見表1~表3。
基于式(1)在Matlab中直接編程,或應(yīng)用ADAMS(2005版)仿真,可得系統(tǒng)的固有頻率,見表4。

表1 懸置軟墊3向靜剛度值 N/mm

表2 總成質(zhì)量與慣量

表3 懸置軟墊安裝位置坐標 mm
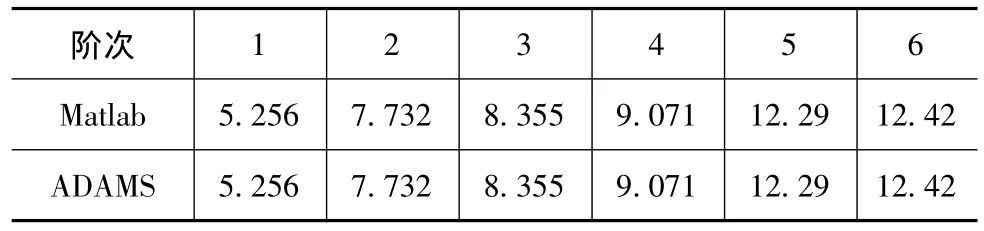
表4 系統(tǒng)固有頻率 Hz
由表4可見,應(yīng)用Matlab編程得到的頻率與ADAMS仿真計算結(jié)果相同。
應(yīng)用各自得到的主振型矩陣,分別依據(jù)式(4)~式(8)或式(9)~式(18),同時考慮是否取絕對值,可得到相應(yīng)的能量分布矩陣,X、Y、Z分別表示純平動能量,RXX、RYY、RZZ分別為繞坐標軸純轉(zhuǎn)動能量,RXY、RXZ、RYZ則為慣性積引起的平面交換能量,見表5和表6。其中表6所示結(jié)果分別由Matlab與ADAMS計算得到。
由表5和表6可知,基于自由度的能量分布矩陣與基于慣性參數(shù)的能量分布矩陣中,均因慣性積的存在而出現(xiàn)了負值能量。取絕對值后計算的模態(tài)能量總和稍稍增大,各元素也相應(yīng)地發(fā)生改變,但是不影響對主振動能量在各自由度或慣性參數(shù)上分布的定性判斷。另外無論是否取絕對值,式(19)~式(22)所示關(guān)系均能得到滿足。
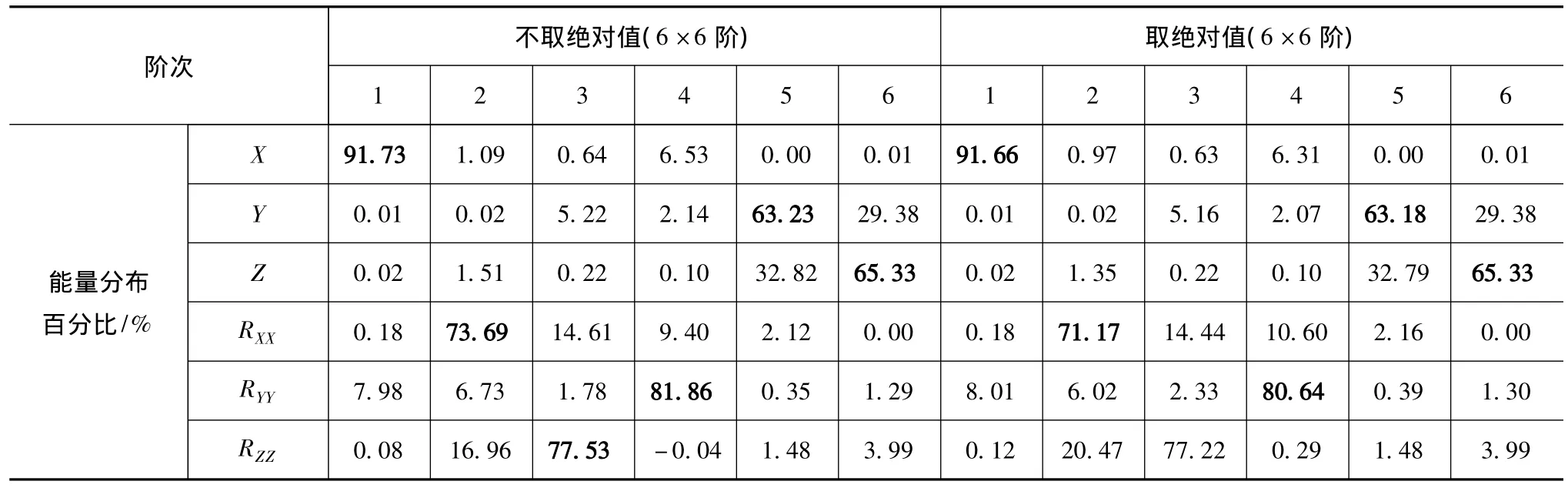
表5 基于自由度的能量分布矩陣
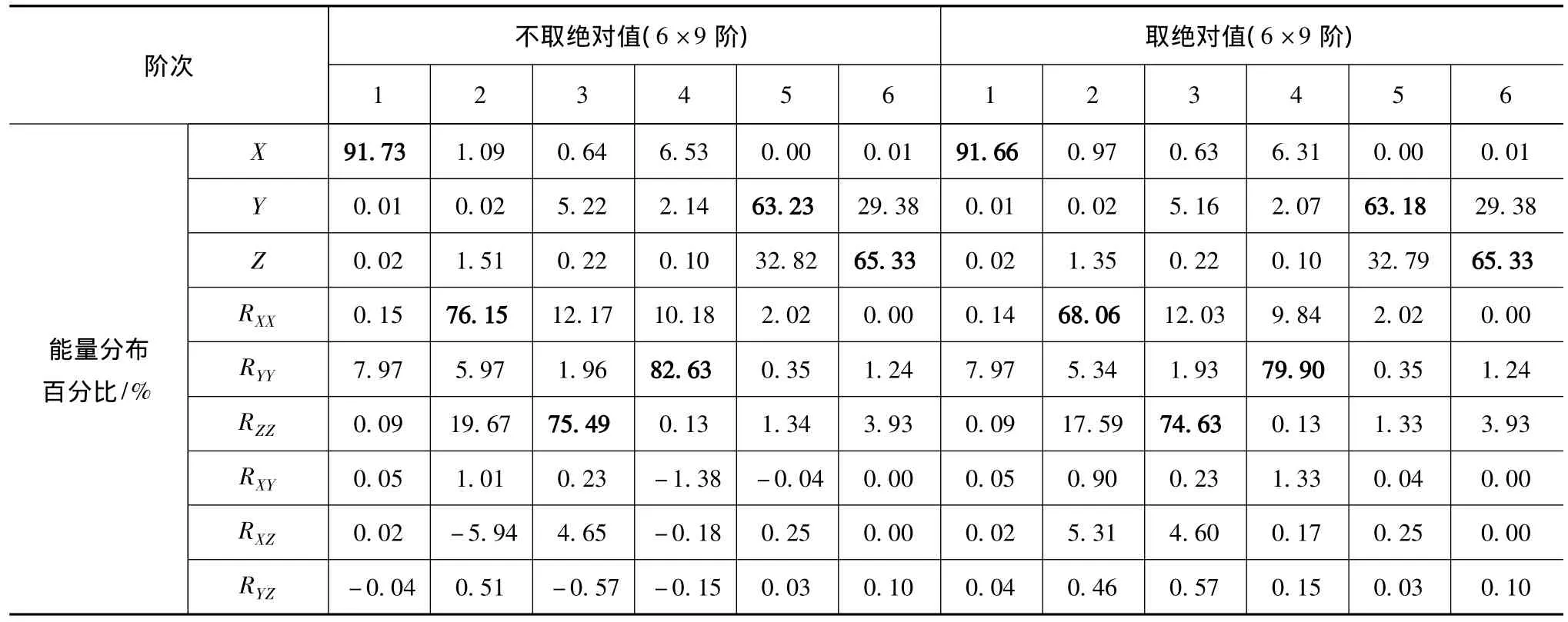
表6 基于慣性參數(shù)的能量分布矩陣
5 結(jié)論
(1)基于系統(tǒng)自由度而定義的6×6階模態(tài)能量分布矩陣,體現(xiàn)了主振動中振動能量在系統(tǒng)各自由度上的分布情況,物理意義明確、便于理解。
(2)ADAMS中定義的6×9階能量分布矩陣,與系統(tǒng)自由度并不對應(yīng),但是能夠更明確地反映慣性張量中不同元素的影響。
(3)兩種模態(tài)能量分布矩陣,取絕對值計算得到的能量分布與依據(jù)基本定義得到的結(jié)果不同,但仍能準確地反映出主振動能量在各自由度或慣性參數(shù)上的分配情況。
(4)對于任一階主振動,無論是否取絕對值進行計算,兩種表達方式給出的模態(tài)能量總和相等、平動能量也彼此相等;描述轉(zhuǎn)動的對應(yīng)能量分量之間均滿足模態(tài)動能定義所決定的對應(yīng)關(guān)系。
[1]徐石安,肖德炳,鄭樂寧,等.發(fā)動機懸置的設(shè)計及優(yōu)化[J].汽車工程,1983(3):12-23.
[2]上官文斌,蔣學(xué)鋒.發(fā)動機懸置系統(tǒng)的優(yōu)化設(shè)計[J].汽車工程,1992,14(2):103-110,119.
[3]閻紅玉,徐石安.發(fā)動機懸置系統(tǒng)的能量解耦法及優(yōu)化設(shè)計[J].汽車工程,1993,15(6):321-328,334.
[4]徐石安.汽車發(fā)動機彈性支撐隔振的解耦方法[J].汽車工程,1995,17(4):198-204.
[5]Cho Seonho.Configuration and Sizing Design Optimization of Powertrain Mounting Systems[J].International Journal of Vehicle Design,2000,24(1):34-47.
[6]方錫邦,陳樹勇,張文炬.轎車動力總成懸置系統(tǒng)隔振性能的仿真研究[J].合肥工業(yè)大學(xué)學(xué)報(自然科學(xué)版),2003,26(2):236-241.
[7]范讓林,呂振華.剛體-彈性支承系統(tǒng)振動解耦評價方法分析[J].工程力學(xué),2006,23(7):13-18.
[8]王顯會,李守成,黃鵬程,等.轎車發(fā)動機動力總成懸置系統(tǒng)優(yōu)化研究[J].南京理工大學(xué)學(xué)報(自然科學(xué)版),2006,30(1):17-20.
[9]李令兵,陳劍,吳趙生.基于ADAMS的發(fā)動機懸置系統(tǒng)設(shè)計[J].噪聲與振動控制,2007(6):42-44,48.
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
天天愛科學(xué)(2020年6期)2020-09-10 07:22:44
數(shù)學(xué)物理學(xué)報(2017年6期)2018-01-22 02:26:40
山東青年(2016年1期)2016-02-28 14:25:25
湖北經(jīng)濟學(xué)院學(xué)報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學(xué)院學(xué)報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:44
計算物理(2014年2期)2014-03-11 17:01:39
當代修辭學(xué)(2014年3期)2014-01-21 02:30:44
公務(wù)員文萃(2013年5期)2013-03-11 16:08:37