基于ADAMS和MATLAB的空氣懸架系統仿真與試驗研究
2013-09-04 06:46:46詹長書
汽車技術 2013年1期
關鍵詞:模型
徐 寧 詹長書
(東北林業大學)
1 空氣懸架系統動力學仿真模型
1.1 空氣彈簧特性試驗
空氣彈簧特性試驗主要包括靜態特性和動態特性試驗。本文用到的動態特性是在正弦激勵條件下測得的力和位移曲線,經處理后可得動態剛度特性曲線[1,2]。將空氣彈簧固定在自行研制的振動試驗臺上,通過安裝的位移、氣壓和拉壓力傳感器測量所需數據。
試驗使用的空氣彈簧是E7074型膜式空氣彈簧,試驗臺可沿直線導軌做垂直運動。按照空氣彈簧特性試驗的國家標準 《汽車懸架用空氣彈簧實驗方法》(GB/T13061-1991)進行試驗,得到 E7074 型空氣彈簧在標準工作高度為400 mm,內部氣壓分別為0.3 MPa、0.4 MPa和0.5 MPa時的動態特性曲線如圖1所示。
1.2 ADAMS/View中空氣彈簧模型
選擇在標準工作高度時彈簧內部氣壓為0.4 MPa的動態特性曲線作為仿真參考數據,將該曲線通過均方差值在0.5以下的四次方擬合函數擬合得到力和位移關系式[3],再經求導后得到動態剛度特性曲線。ADAMS/View中默認垂直向上為正方向、彈簧壓縮行程位移為負方向,與以往的定義正好相反。將數據導入到ADAMS/View中生成多義線SPLINE_2,即得到如圖2所示空氣彈簧模型特性曲線。
1.3 ADAMS/View中空氣懸架模型
將復雜的空氣懸架振動系統簡化為一個彈簧阻尼系統,排除橫擺振動、側傾振動及其他一些干擾振動,只研究垂直方向的振動,空氣懸架簡化模型.JHsus08以某貨車參數為參考對象,以彈簧阻尼器代替輪胎。表1為某貨車懸架質量參數、減振器參數和輪胎特性參數。本文主要研究可通過沖、放氣來改變自身特性從而優化懸架性能的半主動空氣懸架,為了方便仿真與分析,將可沖、放氣的空氣彈簧簡化為一個被動空氣彈簧和一個作動器,即在懸架模型中用一個力來代替由控制器調節電磁閥使空氣彈簧進行沖、放氣所增加或減少的那部分彈力,該力的值從控制器模型輸出到ADAMS的懸架模型中,力的表達式為
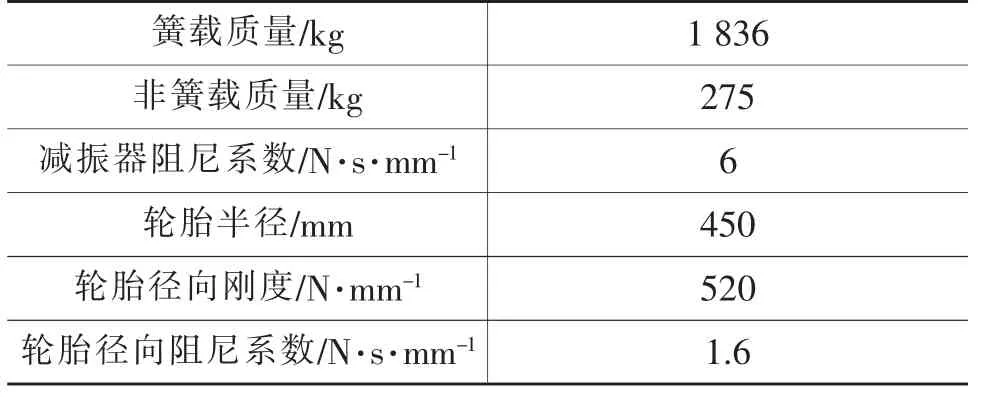
表1 2自由度1/4某貨車懸架模型參數
2 綜合控制器設計
為了利用更多懸架狀態反饋信號,更加智能的改善懸架性能,本文設計了一種綜合控制器。該綜合控制器將對車身加速度進行直接控制的PID控制器和對懸架動行程進行直接控制的位置全狀態反饋控制器相結合,提高了懸架整體性能。
2.1 PID控制器設計
PID控制原理是根據偏差變化調節控制量,偏差增大,控制量也增大,這是比例環節的作用;由于偏差一直存在,將其累加起來,加大控制量以消除偏差,這是積分環節的作用;微分環節起到預估作用,避免偏差振蕩[4,5]。本文采用傳統的PID控制器直接對車身加速度反饋偏差進行控制,在Simulink環境中建立半主動空氣懸架的PID控制器模型。
2.2 位置全狀態反饋控制器設計
位置全狀態反饋控制器直接對懸架動行程的反饋偏差進行控制,主要由位置回路、速度回路和加速度回路組成。控制器將根據位置傳感器傳來的信號與給定值求得的偏差來調節被控量,偏差增大控制量也增大;速度負反饋校正在提高系統固有頻率的同時也降低了系統的增益和阻尼;加速度負反饋校正可以在保證穩定性的前提下提高系統阻尼。因此,通過調整外部位置回路增益系數Ke、速度負反饋系數Kfv和加速度負反饋系數Kfa,可取得較好的控制效果。
位置全狀態反饋控制規律為:
式中,u(t)為控制器控制量;e(t)為反饋偏差;Ke為位置回路增益系數;Kfv為速度反饋系數;Kfa為加速度反饋系數。
2.3 綜合控制器模型
將PID控制器與位置全狀態反饋控制器連接起來,給每個控制器一個增益系數Gain1和Gain2,通過調節增益系數和控制器內部參數,改善空氣懸架系統性能。綜合控制器模型如圖3所示,其中,kp、ki、kd分別為PID控制器的比例、積分和微分系數;k1為傳感器放大系數,此處為1;k2、k3、k4分別為位置全狀態反饋控制器的位置回路增益系數、速度反饋系數和加速度反饋系數;Gain1和Gain2是2個控制器的分配系數。
3 聯合仿真和結果分析
首先在ADAMS中建立5個系統狀態變量,通過ADAMS/Controls模塊的接口定義控制力kzl和路面lm為輸入變量,車身加速度a、輪胎動載荷lt和懸架動行程xj為輸出變量。定義輸入輸出變量后,在MATLAB中激活ADAMS子程序,將控制器模型、路面模型與ADAMS子模塊相連接[6,7],進行聯合仿真。聯合仿真時間為6 s,仿真相對誤差為0.001,聯合仿真模型如圖4所示。
聯合仿真中增益系數Gain1和Gain2時既不能消耗太多能量又要根據實際需要。兩者全為0時是被動控制,某一個為0時是單獨的PID控制或位置全狀態反饋控制,都不為0時是綜合控制。綜合控制時對控制效果的調節主要取決于2個增益的比值和大小,在0~1之間時,優化百分比會大致按比例縮小,都為1時控制效果較好,但此時能耗也比增益在0~1之間時要高,增益系數越大,能耗越高且控制效果不規律,因此應盡量采用較小的增益系數以獲得較好的控制效果。表2給出了增益系數Gain1和Gain2在幾個典型數值上的懸架性能指標均方根值。

表2 空氣懸架性能指標均方根值
圖5~圖7是Gain1和Gain2分別為1.6和1.1時的仿真結果對比,與被動控制相比,本文采用的綜合控制器將車身垂直加速度和懸架動行程均方根值顯著降低,改善了懸架性能。
4 結束語
經過對空氣彈簧彈性特性的試驗研究,在ADAMS中建立了2自由度1/4某貨車空氣懸架模型,在MATLAB環境下設計了一種綜合控制器,通過聯合仿真對隨機激勵下的空氣懸架模型進行了半主動綜合控制。研究結果表明,綜合控制器能夠有效改善汽車行駛平順性,并可根據實際情況通過增益系數的調節得到需要的控制效果。
1 李仲興,李美,牛光,周孔亢.半主動懸架空氣彈簧的動態特性研究.汽車工程,2010,32(3):244~247.
2 鄭明軍,王海花,王淵.空氣彈簧彈性特性理論分析與實驗研究.噪聲與振動控制,2009(3):43~46.
3 陳燎,周孔亢,李仲興.空氣彈簧動態特性擬合及空氣懸架變剛度計算分析.機械工程學報,2010,46(4):93~98.
4 Alf Isaksson, Tore Hgglund, Editorial.PID Control.IEE Proc Control Theory, 2002,149(1):12~14.
5 宋宇.空氣懸架車輛ADAMS與MATLAB聯合仿真研究.汽車技術,2008 (10):40~43.
6 J R.Capitani, G.Masi, A.Meneghin, D.Rosti.Handling analysis of a two-wheeled vehicle using MSC.ADAMS/motorcycle.Vehicle System Dynamics, 2006,44(1):698~707.
7 Jinzhi Feng, Songlin Zheng, Fan Yu.Bandwidth-limited active suspension controller for an off-road vehicle based on co-simulation technology.Frontiers of Mechanical.Translated from Journal of Shanghai Jiao Tong University,2006,40(6):952~957.
8 賈濤,張淑敏.基于虛擬樣機技術的空氣懸架客車平順性仿真研究.汽車技術,2005(11):8~11.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19