模糊控制在溫室控制系統中的應用
2013-09-04 08:36:22郭曉剛
長春工業大學學報 2013年1期
關鍵詞:環境
郭曉剛, 夏 穎
0 引 言
多年來,人們以溫室作為研究對象,對影響作物生長的各種環境因子(如溫度、濕度、光照和CO2濃度等)進行控制及調節,以期獲得適宜作物生長的環境條件,并取得最佳的效益。由于溫室環境系統是一個多變量、大慣性的非線性系統,并且有耦合和延遲等現象,所以很難對其建立精確的數學模型。文獻[1-2]只對溫度單因子進行了控制,并不能很好地將綜合因素考慮在內并加以控制。文獻[3-4]不能夠實時地對系統進行變化。
文中針對這一問題,綜合考慮各個影響因子,得到綜合因子作用的生產函數,在此之上進行仿真,使得更加科學、準確地對溫室環境進行智能控制。
1 模糊控制理論
模糊控制屬于計算機數字控制的一種形式。因此,模糊控制系統的組成類同一般的數字控制系統的組成,其框圖如圖1所示。

圖1 控制系統
模糊控制系統一般可以分為4個組成部分:模糊控制器、輸入或輸出接口裝置、I/O接口裝置、傳感器。
模糊控制的基本原理如圖2所示。

圖2 模糊控制原理框圖
它的核心部分為模糊控制器,模糊控制器的控制規律由計算機的程序實現,實現一步模糊控制算法的過程如下:微機經中斷采樣獲取被控制量的精確值,然后將此量與給定值比較得到誤差信號E(在此取單位反饋)。
一般選誤差信號E作為模糊控制器的一個輸入量。把誤差信號E的精確量進行模糊量化變成模糊量,誤差E的模糊量可用相應的模糊語言表示。至此,得到了誤差E的模糊語言集合的一個子集e(e實際上是一個模糊向量)。再由e和模糊控制規則R(模糊關系)根據推理的合成規則進行模糊決策,得到模糊控制量為:

式中:u——一個模糊量。
模糊控制算法可概括為以下4個步驟:
1)根據本次采樣得到系統的輸出值,計算所選擇的系統的輸入變量;
2)將輸入變量的精確值變為模糊量;
3)根據輸入變量(模糊量)及模糊控制規則,按模糊推理合成規則計算控制量(模糊量);
4)由上述得到的控制量(模糊量)計算精確的控制量。
1.1 輸入、輸出變量的確定
系統中把溫度偏差e以及溫度偏差變化率ec作為雙輸入變量,對于偏差e的模糊集為{NB(負大),NM(負中),NS(負小),NZ(負零),PZ(正零),PS(正小),PM(正中),PB(正大)},ec的模糊集為{NB(負大),NS(負小),Z(零),PS(正小),PB(正大)}。
量化域分別為[-3,-2,-1,-0,+0,1,2,3]與[-2,-1,0,1,2]。對于輸出變量kzl的模糊集為{NB(快速降溫,NS(慢速降溫),NONE(無變化),PS(緩慢加熱),PB(快速加熱)}。
1.2 輸入、輸出量的隸屬度函數
在該模型仿真系統中,溫濕度偏差和偏差變化率均采用高斯型隸屬度函數,如圖3所示。

圖3 隸屬度函數
根據輸入變量e以及變量ec兩個值,將其代入系統模型中,可以得出與之對應的輸出控制變量,即kzl。其值可以與執行機構的動作一一對應。對于如圖3所示的kzl=0.175,該值不變化的隸屬度值為0.893,根據最大隸屬度原則,加熱系統不做變化。
控制量的隸屬度函數如圖4所示。

圖4 控制量的隸屬度函數
2 生菜生長函數的確定
層次分析法獲取主要影響因子。
光合作用的反應式如下:

從反應式中可以看出,光合作用[2]與溫室環境中的光照、二氧化碳、水都有直接的關系。事實上,在溫室環境中影響光合作用的因素有很多,主要包括光照強度、溫度、二氧化碳濃度、水分和植物體內部因素,如葉齡、葉綠素以及光合產物從葉片運出的速率等。
其中前4種屬于溫室環境因子,是溫室環境控制的主要對象。而土壤物理化學環境中各因素之間的交互作用關系沒有氣候環境中的復雜,而對光合作用的影響是間接的。
于是,可以從這個角度去建立層次分析法中的判斷矩陣,決策層則選取凈光合速率。而影響光合速率的因素,我們選取光照強度、溫度、濕度、二氧化碳濃度、植物體內葉綠素、土壤中礦物質含量為方案層,如圖5所示。

圖5 層次圖
于是得到判斷矩陣:

經過最大特征值法求得該判斷矩陣的最大特征值為

其對應的特征向量

于是,得到了影響植物光合作用的影響因素光照強度、溫度、濕度、二氧化碳濃度、植物體內葉綠素、土壤中礦物質含量,這6種因素的權重分別為0.26,0.20,0.24,0.14,0.08,0.08。由于在特定的溫室環境下,對于土壤和特定的植物來說,這些都是不屬于溫室環境控制因素[5],所以,在此不討論對其的控制。因為水對光合作用的影響只發生在作物光合作用的特定時期,且與其它主要環境因子的交互作用不顯著,變化規律容易掌握,實際生產中,只需將其控制在一定范圍內,或按照單獨的控制目標實現閉環控制即可。
以凈光合速率為指標,建立其與溫度、光照強度和濕度等因素的量化關系。通過對獲得的實驗結果表明,各環境因子與凈光合速率之間存在著顯著的二次函數關系,且各環境因子之間互作效應顯著。因此,決定選取以通過二次通用旋轉組合回歸設計方法[6]而得到的凈光合速率與光照強度、溫度和濕度等環境因子之間的二次函數關系式作為文中實施溫室環境優化控制的模型。
因素水平編碼表見表1。
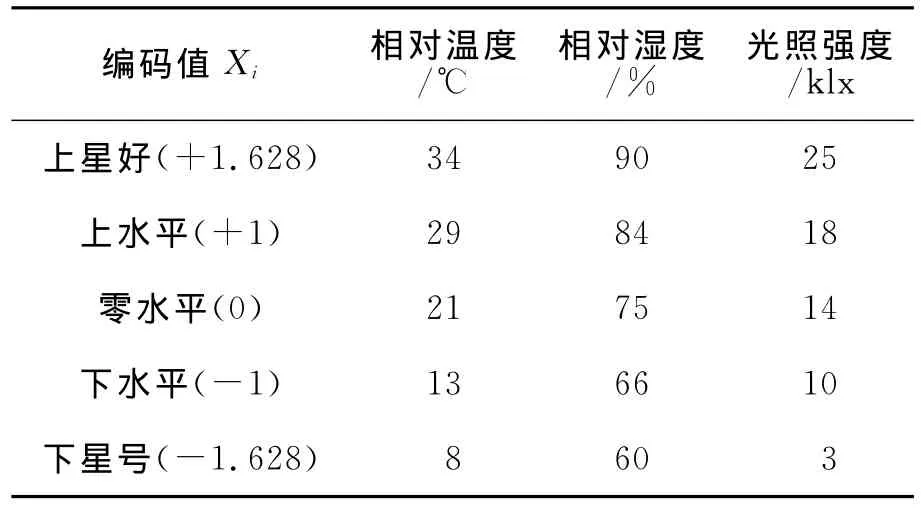
表1 因素水平編碼表
對正交試驗結果進行方差分析和顯著性檢驗[7]。查F 表

說明回歸方程擬合的好。

說明方程顯著。
則回歸方程為:

式中:f(x1,x2,x3)——凈光合速率;
x1,x2,x3——分別代表相對溫度、相對濕度、光照強度。
通過求解,該數學規劃問題的最優解為(x1,x2,x3)=(31℃,85%,16klx),于是可以得出結論,生菜在溫度為31℃,濕度選取為85%,光照強度為16klx的時候,生菜的凈光合速率最大。而在實際的溫室環境當中,出于節能角度和經濟型控制的角度,不采取補光措施[8],光照強度是完全來自自然條件的。于是問題變成了當每天不同的時間段下,當時天氣情況下的光照強度為一個不可控影響因子,也就是理論上的最優值是不能夠取到的,就要根據給定的當天光照強度來找到與之對應的溫度和濕度,得到最優值之后,與當前值進行比對進行模糊控制。
3 軟件界面以及仿真
針對本溫室環境控制系統的具體特點,利用Windows系統下VC++的MFC技術,文中設計了用戶溫室控制系統的用戶界面,MFC界面設計非常方便,能夠隨心所欲地實現各種功能,如圖6所示。

圖6 用戶界面圖
當讀入環境參數因子的這些狀態值之后,點擊開始運行,通過內部的模糊控制算法,可以對執行機構中的硬件設施進行發送指令[9]。而對于溫室環境氣候來說,具有不精確的特性,由此在設計溫室環境的控制系統時,可以確定控制的時間步長為5~10min,在該設計中采用8min。每經過這樣的時間步長,系統進行一次狀態的調整,同時給出相應硬件的動作指令。這樣的控制步長是合理的,因為假如時間過短的來改變狀態,則執行機構也會頻繁地進行動作,大大地提高了控制成本。而且對于硬件設施來說,也會減短它的使用壽命。如果控制步長過大,則控制系統不能很快地對采集到的數據做出分析,判斷進而不能及時地調整溫室內的影響因子狀態。
輸入、輸出曲面如圖7所示。

圖7 輸入、輸出曲面
4 結 語
就生菜的溫室系統進行了研究,首先利用層次分析法得到影響生菜生長的主要因素,然后,利用模糊控制規則[10]及最優化方法得到生菜生長的函數,最后針對某一光照下,利用模糊神經網絡控制調節生菜的溫濕度。實際結果表明,該系統具有較好的適應性,能夠較好地滿足實際生產的需要。
[1] 馮帆,邱立春,劉維佳.模糊控制在溫室溫濕度控制系統中的應用[J].農機化研究,2009(6):16-19.
[2] 涂承宇.模糊控制理論與實踐[M].北京:地震出版社,1998:36-46.
[3] 高亮,任振輝,李靜雅,等.基于模糊控制技術的溫室溫度控制節點設計[J].河北農業大學學報,2004(3):101-103.
[4] 王耀南.實時專家智能控制系統的數據通信技術[J].微計算機原理,1993,14(5):45-49.
[5] 陳芳,聶鵬,陸興旺,等.基于數字溫度傳感器的模糊溫度控制系統[J].傳感器技術,2003,22(11):45-47.
[6] 王立新.模糊系統與模糊控制教程[M].北京:清華大學出版社,2003:20-34.
[7] Thomas L Satty.Decision making-the analytic hierarchy and network process[J].Journal of Systems Science and Systems Engineering,2004(1):23-27.
[8] Horn R A,Johnson C R.Matrix and analysis[M].New York:Cambridge University Press,1985:50-62.
[9] Zhao XiaoJian.Study on greenhouse environmental control model and decision[J].Journal of Anhui Agri.Sci.,2012,40(2):1217-1218.
[10] 張德江.智能控制技術現狀與展望[J].長春工業大學學報:自然科學版,2002,23(1):58-61.
猜你喜歡
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中國生殖健康(2020年6期)2020-02-01 06:28:50
新世紀智能(英語備考)(2019年12期)2020-01-13 06:07:18
瘋狂英語·新策略(2019年9期)2019-10-17 01:51:34
中國生殖健康(2019年11期)2019-01-07 01:28:02
中國生殖健康(2018年6期)2018-11-06 07:09:28
濰坊學院學報(2017年2期)2017-04-20 08:44:31
中國環境監察(2016年5期)2016-10-24 05:25:52
中國商論(2016年33期)2016-03-01 01:59:38
