環保樹墻修剪機設計
2013-09-04 08:36:24陳延偉王占禮張自強龐在祥
長春工業大學學報 2013年1期
關鍵詞:設計
陳延偉, 王占禮, 張自強, 龐在祥
0 引 言
現在城市綠化的要求越來越高,樹墻作為其中的一部分以其成本低廉、整齊美觀發揮了重要的作用,但同時隨著樹木枝葉的生長,樹墻頂端也變得參差不齊,再加上樹墻位置和形狀的約束,因此,樹墻修剪對工人要求具有較高的操作水平和經驗[1-2]。
傳統的修剪工具手持汽油機式“綠籬剪”,在實際應用過程中會產生以下幾個弊端:首先,汽油機會產生很大的噪音污染,“綠籬剪”工作時的噪音可達到95dB以上;其次,汽油機排出大量的尾氣還會對大氣有很大的污染;第三,工人在用“綠籬剪”作業時,必須由人手持邊行走邊修剪,帶來繁重的勞動強度[3-4]。根據國內外環衛機械的實際情況及環衛部門實際工作需求[5-6],我們設計了一款操作簡便、成本低廉、能耗低、噪音小的自動樹墻修剪設備,該設備大幅地降低了工人的勞動強度、改善了工人的勞動環境,實現了綠色環保的城市建設要求,為城市環衛機械化貢獻微薄力量。
1 環保樹墻修剪機的工作機理及總體設計
1.1 修剪機工作機理[7]
環保樹墻修剪機是根據環衛工人實際工況,深入分析了樹墻修剪操作的工況及流程,其傳統的修剪方法是由工人師傅手持汽油機式“綠籬剪”進行修剪,在實際應用過程中有上述的幾個弊端。
所設計的樹墻修剪機是利用電動車作為工作平臺,工作過程中,每個行程完成一個樹墻平面的修剪,然后通過改變刀具的工作位置再次行走完成下一個平面的修整。該裝置采用機械手臂的方式來實現修剪刀具的定位,進而可對不同傾斜角度的樹墻進行修剪。與此同時,通過調節水平臂的伸縮和垂直臂的升降,來完成對不同規格樹墻的修剪。
1.2 總體設計
1.2.1 設計目標
利用機電結合的綠色環保設計理念,將傳統的樹墻修剪工作用樹墻修剪設備來實現,其目的是將環衛工人從繁重的修剪勞動中解脫出來,同時改善其工作環境,降低能耗和污染,制定以下設計目標:
1)原動機選擇直流電機,動力源選擇蓄電池作為首選,條件允許的情況下配備太陽能電池板。
2)實現工作面不同寬度的適應性調節。
3)實現不同高度的適應性調節。
(四)結構扁平,領導管理要求高。省軍區系統重組重塑后,體制結構更加扁平,人員編成更加精干,對領導管理工作提出新的更高要求。由于省軍區單位點多線長面廣,且駐地相對分散,管理對象既有軍官、士兵、文職人員和職工,還有專武干部和離退休干部,人員多樣、成分復雜,領導管理任務重、壓力大。因此,過去那種事無巨細“一竿子插到底”、大包大攬“保姆式”的領導管理方式顯然已不適用,必須打破傳統思維,跳出固有模式,創新理念方法,建立更加科學高效的領導管理和工作指導體系。
4)實現工作面任意角度的修剪。
5)實現殘枝葉的自動回收,提高工作效率。
6)實現較高的平面度和垂直度的修剪。
7)實現電動車的行走,使工人可以開車工作,從而降低工人的勞動強度。
1.2.2 機械結構設計
根據以上設計目標,將環保樹墻修剪機的總體設計劃分為5大模塊,即:
1)樹墻的修剪機構;
3)綠籬剪工作面水平伸縮機構;
4)綠籬剪工作面高度的升降機構;
5)電動小車運動機構。
樹墻修剪機的總體方案如圖1所示。
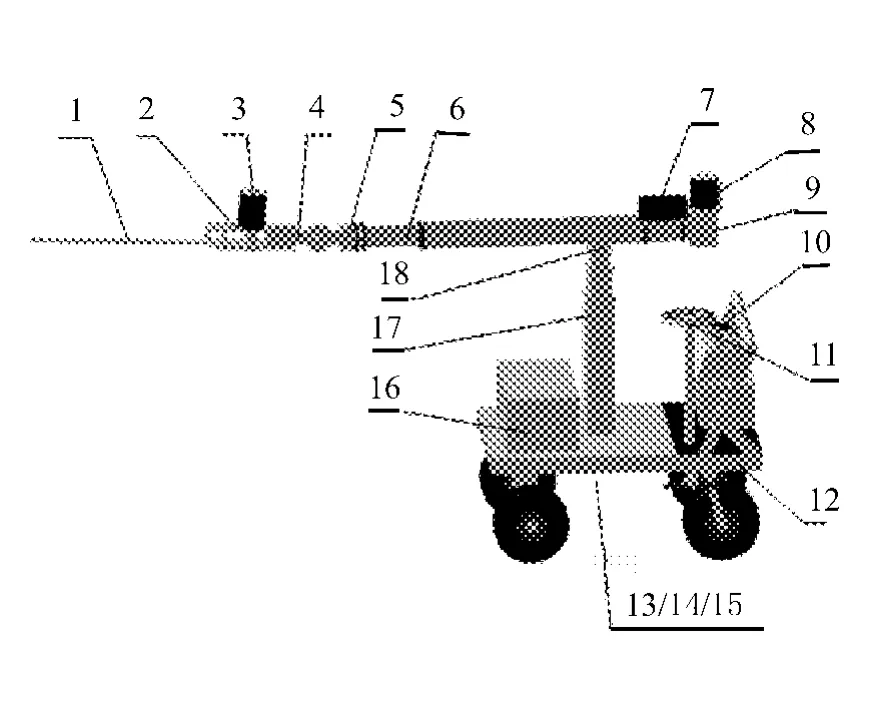
圖1 樹墻修剪機總體方案
本設備主體支撐是一輛電動四輪車;垂直升降臂17與車體固聯,通過絲杠與螺母聯接實現不同高度樹墻的修剪功能;水平伸縮臂6通過電機帶動減速器,減速器帶動絲杠與螺母聯接,實現水平伸縮功能,以完成不同寬度樹墻的修剪;水平臂自動翻轉機構4連接在水平伸縮臂7上,通過定位銷來實現任意角度定位。
1.2.3 電氣控制系統
本環保樹墻修剪機使用的是低壓直流供電,雖然工作電機的功率不大,但是其工作電流很大。如果單獨啟動,“綠籬剪”工作電機的啟動電流達到16A,行走電機啟動電流達12.5A,而直接用開關控制則會出現大弧光將開關燒毀,因此,設備中的4個電機都是由直流繼電器加開關來控制實現的[8]。
繼電器是一種電子控制器件,它具有控制系統(又稱輸入回路)和被控制系統(又稱輸出回路),通常應用于自動控制電路中,它實際上是用較小的電流去控制較大電流的一種“自動開關”。故在電路中起著自動調節、安全保護、轉換電路等作用。“綠籬剪”電機工作時只要能開、能關即可,其主電路如圖2所示。
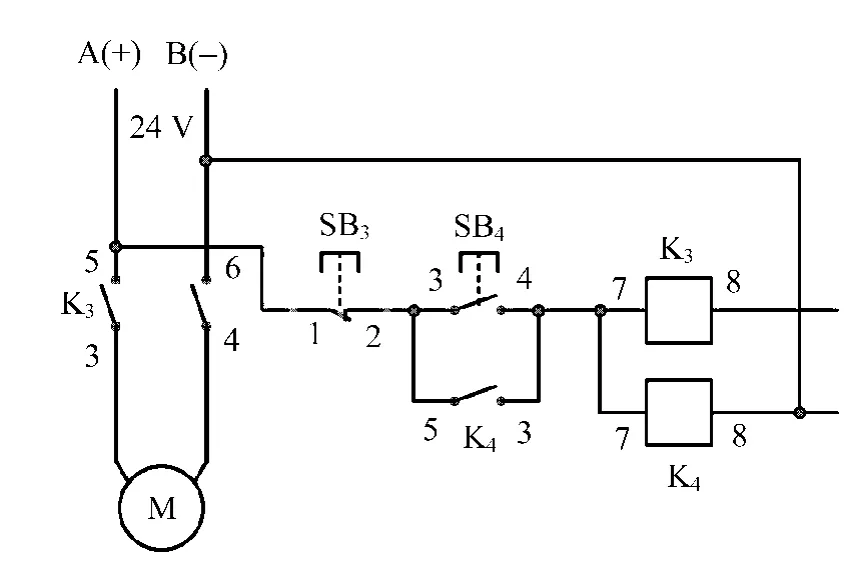
圖2 “綠籬剪”工作電機控制電路
K3,K4為24V直流線圈繼電器,SB3,SB4分別為鋸開和鋸關開關。
垂直升降、水平伸縮通過工作電機正反轉來實現,其控制電路如圖3和圖4所示。
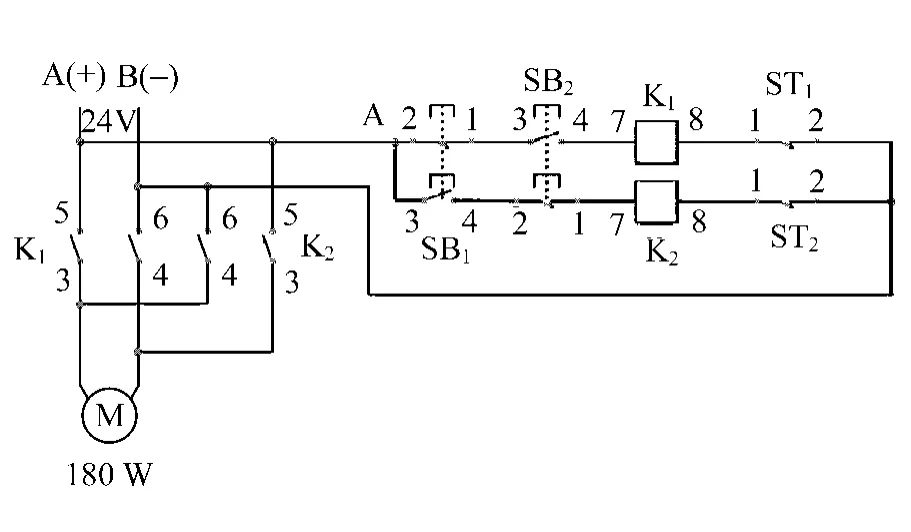
圖3 垂直升降、水平伸縮工作電機控制電路
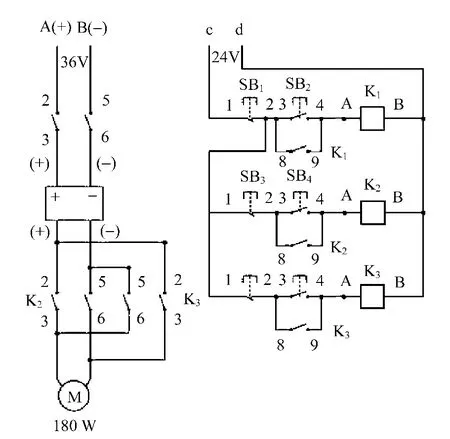
圖4 行走電機控制電路
2 環保樹墻修剪機的實體建模
計算機輔助設計在現代產品開發中起著非常重要的作用[9]。這是因為利用計算機輔助設計可以預先估計出它們在各種環境下的表現,并且速度快、成本低。設計師可以通過計算機軟件迅速確定方案,合理地選擇參數。對環保樹墻修剪機的三維建模是項目進行過程中不可缺少的環節。其目的是在設計時能夠直觀地反應環保樹墻修剪機的本體,預測其性能并進行合理優化。由于環保樹墻修剪機結構復雜,因此,使用三維建模與仿真模擬確定環保樹墻修剪機結構方案是非常必要的。
項目設計的環保樹墻修剪機主要有4大模塊組成,分別是行走小車、豎直升降機構、水平伸縮機構和綠籬剪運動機構。在三維繪圖軟件Solid-Works中對所選零部件進行三維建模,并在其中采用模塊化設計,即采用單個模塊進行設計和裝配,最后組裝到一起。這樣設計既有利于查看各部之間的配合,也有利于各模塊之間的拆裝,縮短設計時間。各模塊的裝配圖如圖5~圖9所示。
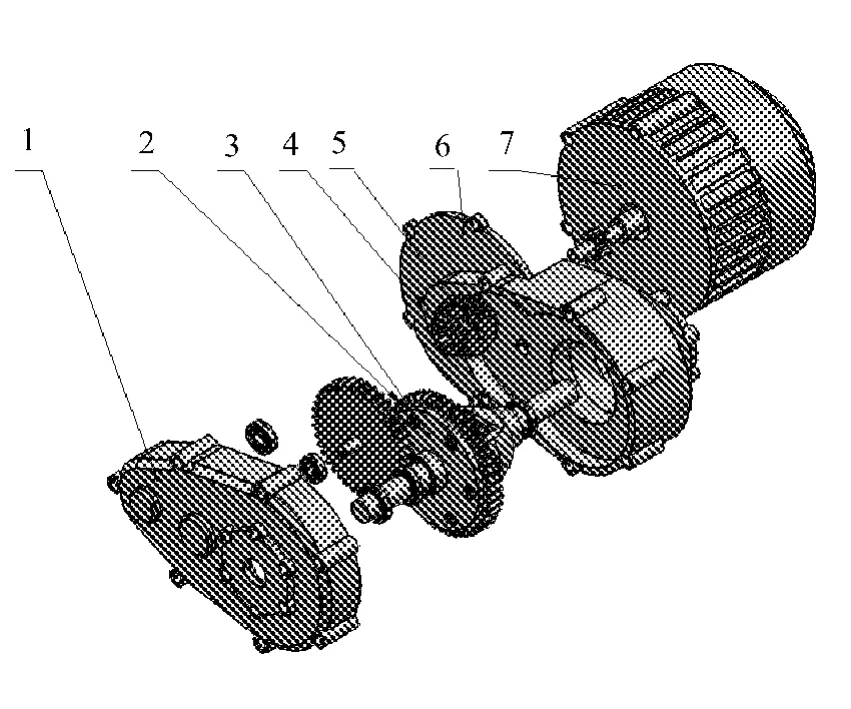
圖5 差速電機裝配示意圖
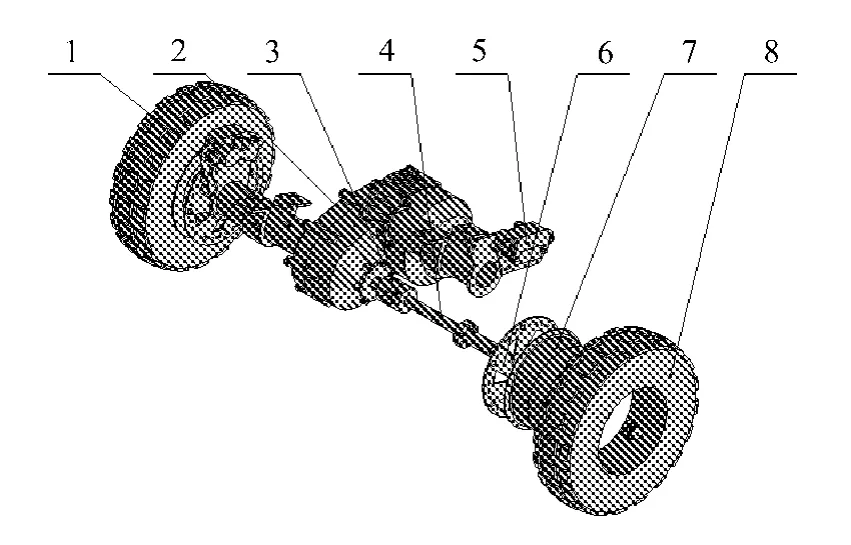
圖6 電動車驅動橋裝配示意圖
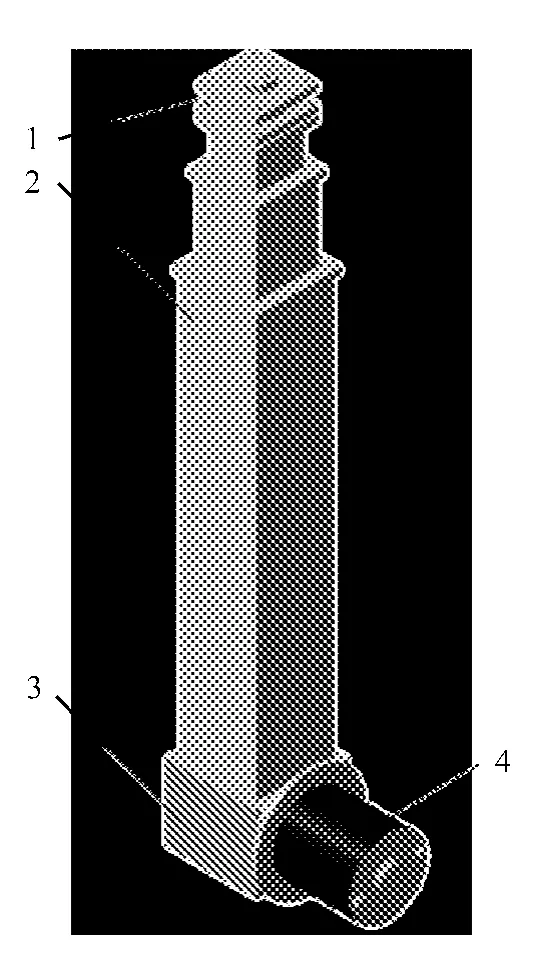
圖7 垂直升降臂機構裝配示意圖
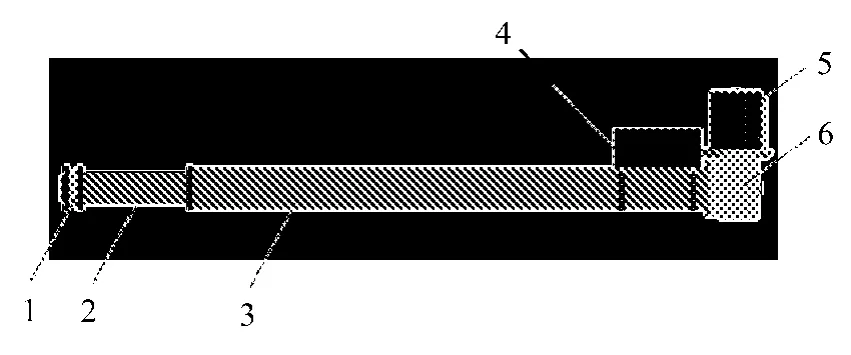
圖8 水平伸縮機構裝配示意圖
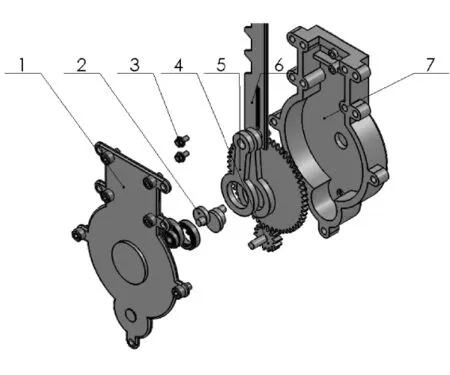
圖9 綠籬剪運動機構爆炸示意圖
利用SolidWorks三維建模軟件,對環保樹墻修剪機各個模塊進行三維建模,實現了樹墻修剪機整機模型化與自上而下的環保樹墻修剪機的虛擬裝配。為樹墻修剪機的仿真分析提供樣機模型,為環保樹墻修剪機的優化設計提供了基礎和借鑒。
3 結 語
環保樹墻修剪機完全是以機械代替了人力勞動,大大減少了工人的勞動強度;當今世界“電能”的產生來源十分廣闊,屬于清潔能源,采用可再生的“電能”充當動力源。在環境保護方面解決了噪音和尾氣污染,在工作時電動機設備產生的噪音不到40dB,完全符合環保要求。而且該裝置不會產生任何尾氣污染環境。環保樹墻修剪機具有綠色環保、操作簡便、人性化設計等特點。
[1] 歐陽天成,梁燕成,陳樹勛.高速公路綠籬修剪機運動學仿真分析[J].裝備制造技術,2012(11):36-41.
[2] 顧正平,沈瑞珍.國內外園林綠化機械現狀與發展趨勢[J].林業機械與木工設備,2004(2):4-6.
[3] 向北平,楊乾華.電動成型綠籬修剪機的研究[J].機械設計與制造,2008(3):98-99.
[4] 雒曉輝,趙悟,楊力超.車載式綠籬修剪機回轉機構的設計與有限元分析[J].建筑機械,2011(1):99-104.
[5] 姜子良,粟田奎.我國園林機械的發展概況與建議[J].遼寧林業科技,2005(3):66-67.
[6] 孟俊煥,王衛東,劉敏.園林綠化機械設備的現狀與發展趨勢[J].農業裝備與車輛工程,2006(1):4-5.
[7] 王偉,唐傳苗,張宏,等.移動式綠籬修剪機設計[J].農業化研究,2010(6):122-155.
[8] 王穎超,鄭瓊林.異步電動機無速度傳感器矢量控制研究[J].長春工業大學學報:自然科學版,2001,22(2):192-196.
[9] 王暉,楊慧香,潘英劍,等.斜齒輪刀計算機輔助設計研究[J].長春工業大學學報:自然科學版,2008,29(2):217-220.
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
