修井作業管柱機械化移運裝置設計與應用
2013-09-07 10:37:02劉麗雪張飄石王善強
石油礦場機械 2013年8期
關鍵詞:作業
高 勝,劉麗雪,張飄石,,王善強
(1.東北石油大學 機械科學與工程學院,黑龍江 大慶163318;2.遼河石油勘探局 曙光工程技術處,遼寧 盤錦124010)①
我國油田每年進行的各類修井作業中,85%以上為小修作業。其中,起下作業在小修作業過程中工作頻率最高,所耗費的時間一般要占據修井總用時的70%以上[1-2]。目前,國內大部分油田修井作業一直采用吊卡與慣性小滑車互相配合對管柱進行起吊與下甩,4人協同、輪流交換的作業方式[3-4],其具體工作過程如下:
1) 上管柱 首先由2名工人利用撬杠將管柱從管排架抬到慣性小滑車上,管柱一端由小滑車固定,另一端搭在坡道上,卷揚機帶動小滑車運動,管柱沿著坡道滑動上升至修井平臺上,再用吊卡卡住管柱,卸掉小滑車,利用吊卡將管柱拉起,使管柱另一端至井口處與井內管柱進行對扣。
2) 下管柱 首先利用吊卡將1根管柱從井內拉出并卸扣,由工人將管柱末端推至坡道,吊卡隨游車下行,管柱沿著坡道下滑至慣性小滑車上,管柱隨小滑車運動到水平位置,然后由2名工人將管柱推至管排架上[5]。
顯然上述操作方式需要多人共同完成,并且其工作效率低,勞動強度大,作業危險性高。遼河油田主產稠油,稠油易凝固,更不利于管柱的輸送,增加了管柱拉送和排放的難度。為了解決這一技術難題,本文提出一種修井作業管柱機械化移運裝置,實現了送管、甩管等多種功能的自動化操作。
1 總體結構設計及工作流程
1.1 結構設計
該修井作業管柱機械化移運裝置主要由底座、上下管機構、造斜滑道、動力伸出臂組成,總體上可按照固定底座、上下管機構、造斜滑道起落機構、動力臂進退機構4大模塊劃分,裝置的整體結構如圖1所示。造斜滑道起落機構主要采用1個主液壓缸、2個輔助液壓缸的支撐結構。滑道作為動力伸出臂的載體,一端與固定底座鉸接,另一端與液壓缸相連。造斜主液缸行程為480mm,最大傾斜角為15°。動力臂進退主要是由液壓缸控制,實現管槽前進與后退,伸出行程可達2m,將管柱準確送至井口。

圖1 修井作業管柱機械化移運裝置總體結構
1.1.1 底座
底座是由普通型材焊接而成,底座的兩端分別與4個上下管機構相連,上部承載造斜滑道和動力伸出臂送管機構,中間放置液壓站和電控柜,方便液壓管線、電線的排放。底座與上下管機構之間由穩定架斜拉桿固定,穩定架斜拉桿起到支撐和穩定上下管機構穩定工作的作用;底座上有斜拉桿掛耳,穩定架斜拉桿取下可放置于掛耳上,使得上下管機構可旋轉90°,收放自如,運輸安全穩定;底座上焊接液壓缸銷座,連接3個造斜起升液壓缸,穩定地支撐起造斜機構。底座設計強度高,具有穩定可靠的特點。
1.1.2 滑道
滑道包括主滑道和輔助滑道,長6 000mm。滑道中間采用80mm液壓缸推動動力伸出臂,伸出行程可達2m。主滑道前端和動力伸出臂后端均有導輪,使動力臂在伸出時減少摩擦;輔助滑道成V形,在工作時也可起到防護板的作用,避免油水污染設備。
1.1.3 動力伸出臂
動力伸出臂由滑道和斜撐承載,動力伸出臂的下端有液壓缸活塞桿,與滑道上端的液壓缸相配合,滿足作業時運載管柱前伸至井口的需要。動力伸出臂上端的V形槽兩端有擋銷,防止上管撥叉撥管柱時管柱滑出管槽,V形槽兩側均可安裝,根據工作需要選擇安裝位置。由于管柱表面沾有大量稠油,稠油易凝固,增大了管柱與V形管槽之間的摩擦力,容易卡住管柱,不利于管柱下放,動力伸出臂上端的V形槽中間有鏈條,兩端的馬達和鏈輪帶動鏈條工作可順利移運管柱。
1.1.4 上下管機構
上下管機構主要由上管撥叉、下管撥叉、2個63mm上下管撥叉液壓缸和1個100mm支腿液壓缸組成。上管時,在上管液壓缸的控制下,上管撥叉將管排架上的管柱撥到動力伸出臂的鏈條上,鏈條不動,動力臂伸出帶動管柱至井口。下管時,管柱由鏈條帶動回到原位,動力臂縮回,造斜機構回落,下管撥叉由液壓缸控制,將管柱撥到管排架上。由于現場地面工作環境惡劣,通過支腿液壓缸對整個裝置進行調平,使該裝置在工作時穩定可靠,同時支腿液壓缸可根據作業要求調整該裝置的高度,如圖2所示。
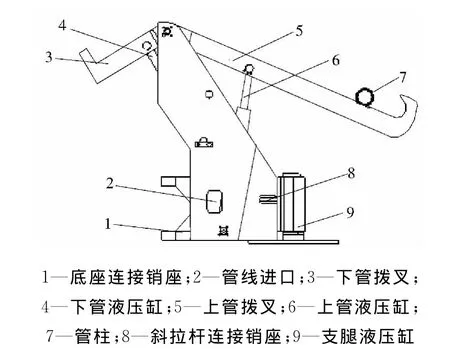
圖2 上下管機構結構
1.2 工作流程
以管柱由管排架送至井口為例,該裝置的主要作業過程分為以下3個步驟:
1) 撥起管柱 首先調試該裝置,使之處于工作狀態,然后啟動上管機構液壓缸工作,該機構中的上管撥叉自動將管排架上的1個管柱撥起,在擋銷的限制作用下,使管柱安全地停在動力伸出臂V形槽上方的鏈條上。
2) 斜起管柱 管柱被撥到動力伸出臂上后,在造斜主副液壓缸的控制下斜撐機構開始工作,使得管柱傾斜一定角度,以便前送管柱,實現送管作業。
3) 推送管柱 動力伸出臂沿滑道前進,使得管柱和工作臺面有一個相同的定位基準,保證管柱對中移送到指定的位置,完成接送管柱任務。然后逆向運動,退回到初始位置,準備操作下根管柱。
回送管柱則是1個逆過程,管柱隨吊卡上行到一定高度,由工人將管柱一端推到V形槽內,吊卡隨游車下行,同時V形槽中間的鏈條在兩端的馬達和鏈輪帶動下工作,移運管柱,當管柱完全進入到V形槽后,然后動力臂后退,斜撐機構回落,下管撥叉將管柱撥到管排架上,完成回送管柱作業。該裝置的整個工作過程如圖3所示。

圖3 管柱機械化移運裝置的管柱處理流程
2 液壓系統設計
液壓站采用泵埋入式結構,使用型號、排量相同的雙聯高壓齒輪泵,保證流量相同,該泵直接植入液壓油箱,由11kW電機直聯帶動,系統潤滑性好,噪聲小;泵站出口配置了安全閥、壓力表等標準設備。控制閥采用專用4路雙向4WE6E-6/CG24Z4型液壓電磁閥,集成了電磁溢流閥、調速閥等液壓控制閥,確保設備在各種狀況下的正常運行。液壓缸包括1支100mm造斜起升主液壓缸,2支63造斜起升副液壓缸,1支80mm前伸液壓缸和8支63 mm上下管機構液壓缸,4支100mm支腿液壓缸。全部采用國產出口級液壓缸,進口密封件,確保每天500次以上頻次使用5a。
液壓系統如圖4所示,該液壓系統有3條進油路,1條回油路。以前送管柱為例說明整個工作過程:首先,由泵(32)提供動力,通過三位四通手動換向閥(21~24)分別調節支腿液壓缸,使該設備平穩后,關閉換向閥;然后,選擇左側上管機構工作,由泵(31,32)提供動力,通過三位四通電磁換向閥(13,17)控制左前起和左后起液壓缸,完成上管操作;其次,由泵(31)提供動力,通過三位四通電磁換向閥(11)控制造斜液壓缸,完成造斜操作;最后,由泵(31,32)共同提供動力,通過三位四通電磁換向閥(12)控制前伸液壓缸,動力臂伸出,將管柱送至井口,完成送管作業。
回送管柱時該裝置的執行動作為反向,由于稠油易凝固,容易卡住管柱,不利于管柱下放,則由泵(31)提供動力,通過二位四通電磁換向閥(2)控制液壓馬達工作,鏈輪帶動鏈條運動,管柱隨鏈條運動,管柱回到原位,之后動力臂退回、造斜機構下落、上下管機構下管,完成回送管柱作業。各液壓缸運動時間如表1所示。
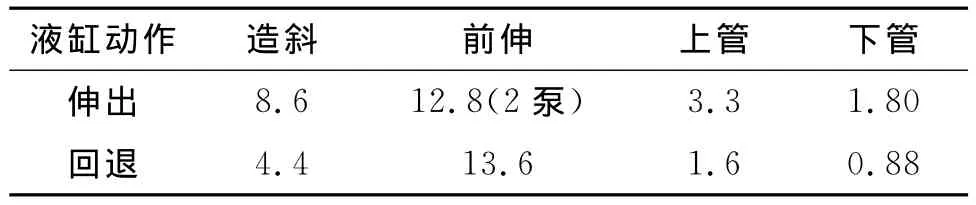
表1 各液壓缸運行時間 s
3 控制系統組成及原理
控制系統主要包括控制柜、主控制盒、副控制盒和遙控系統。
3.1 控制柜
控制柜是電控系統的核心,包括PLC控制器、變壓器、電源開關、接線端子、線夾、警鈴、遙控接收器等。該裝置的控制系統采用PLC程序完全控制,它依據預先編寫的邏輯程序,將操作指令和限位開關反饋信號進行處理,然后對被控對象發出通斷命令。
3.2 主控制盒
主控制盒1個,采用集中式設計,安裝在上下撥管機構的中間。操作面板全部為操作按鈕,實現了控制電機正反轉、手動自動切換、左右位選擇、自動學習、電源啟停、油泵啟停等操作,并且有急停按鈕,確保整個工作過程的安全。
3.3 副控制盒
副控制盒4個,采用分布式設計,方便工作人員控制該裝置工作,分別安裝在上下撥管機構的上部。若右側上下管機構工作時,應在左側上下管機構上的副控制盒上進行手動調試;反之,左側上下撥管機構工作時,應在右側上下管機構上的副控制盒上進行手動調試。副控制盒主要實現了控制該裝置的每個動作,完成上下管機構上下撥管、造斜機構起落、動力伸出臂進退的操作。

圖4 液壓系統設計原理
3.4 遙控系統
遙控系統主要由遙控發射器與遙控接收器組成,可實現對該管柱移運裝置所有動作的控制。遙控系統采用400MHz工業通訊頻段,有效距離為100m,可遠程操控該裝置執行動作,完成起下管柱作業,實現了工人可在距井口一定距離的安全區域控制裝置動作。
該控制系統實現了手動、半自動、全自動多種模式控制。手動模式操作時,首先將主控制盒上“手動自動切換”按鈕切換到手動位置,然后通過主副控制盒上的相應動作的操作按鈕完成;半自動模式可通過手動操作與遠程操控共同完成該裝置整個工作過程的動作;全自動模式通過主控制盒上的“手動自動切換”按鈕將手動狀態切換到自動狀態,在主控制盒上按下“自動學習”按鈕進行操作動作的學習,學習過程結束后,按下“手動自動切換”按鈕,將裝置轉換到自動狀態。此時,可通過遙控器或者副控制盒上的“一鍵式上管”、“一鍵式下管”、“一鍵式前送”、“一鍵式回退”、“鏈傳動起”、“鏈傳動停”等按鈕完成自動上管和自動下管的全過程。
4 現場應用
截至2012-12,所研制的管柱移運機械化裝置在遼河油田已經完成特油超稠油作業井和淺海作業井的6井次現場試驗。總體來講,該裝置能夠通過手動、半自動和自動3種模式實現管柱在管排架與井口之間的自動移運與排放,效果良好,該裝置達到了輸送速度1~2根/min的設計要求;通過試驗,舉升力≥4kN;舉升高度都能達到小修作業井口高度;具有性能穩定、自動化程度高、操作簡便、降低工人勞動強度、消除安全隱患等優點。井口管柱機械化移運裝置工作現場如圖5。
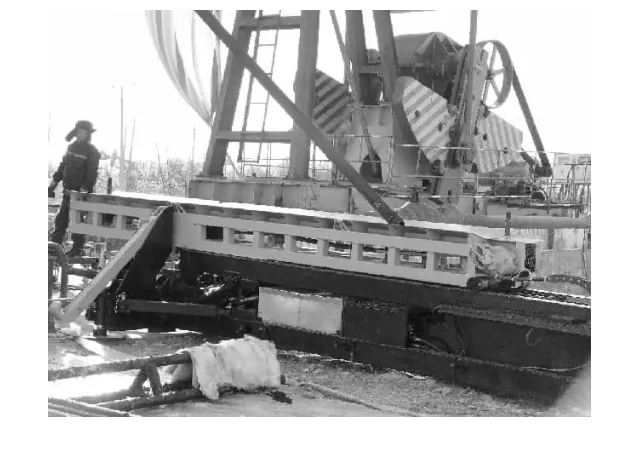
圖5 井口管柱機械化移運裝置工作現場
5 結論
1) 該修井作業管柱機械化移運裝置屬自主研發,構思新穎,結構簡單,技術可行,并能夠與現有的修井設備配合使用,實現了管柱移運與排放的自動化操作。
2) 該裝置舉升力、舉升高度和運移速度經過試驗,均安全穩定可靠運行,并且實現了手動、半自動、全自動多種模式控制,機械自動化程度較高,對降低勞動強度、提高作業效率和安全性都具有十分重要的現實意義,同時也為進一步提升修井作業相關裝備的技術水平提供了可借鑒的思路。
[1]綦耀光,何金平,謝莫華.影響油田小修作業效率的原因分析[J].石油礦場機械,2006,35(4):84-86.
[2]鐘功祥,劉 濤,林 寧.不壓井修井作業起下管柱裝置發展及典型結構[J].石油礦場機械,2012,41(4):69-72.
[3]何 鴻.鉆井平臺鉆桿自動化排放系統方案設計[J].石油礦場機械,2012,41(9):82-84.
[4]譚 云,陳傳慶.修井起下作業中的油管機械化排放問題[J].石油機械,1997,25(3):46-48.
[5]趙淑蘭,李文彪,聶永晉,等.動力貓道技術國內外現狀和發展趨勢[J].石油礦場機械,2010,39(2):13-15.
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08
